

Журомский Нелинейные системы автоматического управления 2012
.pdfРис. 3.9. НСАУ с последовательной линейной коррекцией (обозначения соответствуют рис. 3.8)
Контрольные вопросы
1.Назовите основные виды релейных законов управления.
2.Сформулируйте физическую основу метода гармонического баланса.
4.Напишите выражение, определяющее коэффициент гармонической линеаризации по синфазной составляющей первой гармоники на выходе НЭ.
5.Напишите выражение, определяющее коэффициент гармонической линеаризации по квадратурной составляющей первой гармоники на выходе НЭ.
6.Покажите связь коэффициентов гармонической линеаризации с амплитудными и фазовыми характеристиками НЭ.
7.Представьте логарифмические нормированные характеристики 2-позиционного реле.
−21 −
8.Представьте логарифмические нормированные характеристики 3-позиционного реле.
9.Представьте логарифмические нормированные характеристики «реле с гистерезисом».
10.Объясните физический смысл и аналитическую трактовку терминов «баланс фаз», «баланс амплитуд».
11.Проиллюстрируйте примером графоаналитический способ решения баланса фаз и баланса амплитуд в НСАУ с 2-позицион- ным реле.
12.Проиллюстрируйте примером графоаналитический способ решения баланса фаз и баланса амплитуд для НСАУ с 3-позицион- ным реле.
13.Проиллюстрируйте примером графоаналитический способ решения баланса фаз и баланса амплитуд в НСАУ, содержащей реле с гистерезисом.
14.Проиллюстрируйте примером способ улучшения показателей качества НСАУ с 2-позиционным реле методом последовательной коррекции в линейной части САУ.
15.Проиллюстрируйте примером способ улучшения показателей качества НСАУ с 3-позиционным реле методом последовательной коррекции в линейной части САУ.
16.Проиллюстрируйте примером способ улучшения показателей качества НСАУ с гистерезисным НЭ методом последовательной коррекции в линейной части системы.
…все очень просто. …высшие знания преломлены в самых элементарных понятиях…. Братство говорит. М., Белый ашрам, 1999, с. 18.
4. ИНЖИНИРИНГ.
ПРОМЫШЛЕННАЯ НСАУ ТЕПЛОВЫМ ОБЪЕКТОМ
Функциональная схема САУ показана на рис. 4.1 (визуализация аппаратурного решения НСАУ представлена рис. 4.27–4.38).
Задача автоматического управления состоит в стабилизации температуры ТЭН при различных режимах работы вентилятора, охлаждающего поверхность ТЭН.
− 22 −

Рис. 4.1. Функциональная схема НСАУ тепловым объектом
Объектом управления является специальный электронагревательный элемент (ТЭН), охлаждаемый потоком воздуха от вентилятора.
Вентилятор предназначен для создания специальных технологических условий на поверхности ТЕН. Вентилятор может быть включен на среднюю, полную мощность или выключен. Однако температура поверхности ТЕН при различных условиях обдува не должна изменяться.
Температура объекта измеряется термосопротивлением ТСМ50М. Мостовая измерительная схема, включающая ТСМ, является частью схемотехнического решения регулятора ТМ8.
Температура объекта показывается и записывается само-
писцем в пределах (0−100) °С Основная погрешность показания и записи – не более ±1 % °С.
− 23 −
Регулятор температуры типа ТМ8 релейный 3-позиционный,
с функцией импульсного управления средней скоростью вращения выходного вала промышленного исполнительного механизма (ИМ) постоянной скорости. Настройка средней скорости вращения выходного вала ИМ необходима для установки расчетного значения коэффициента усиления разомкнутой САУ.
Параметры импульсного управления средней скоростью ИМ устанавливаются на тыльной панели регулятора (длительность импульса Ти настраивается в пределах (0,5−10) с, длительность паузы Тп − (10−300) с). Регулятор (см. также рис. 4.30−4.32) имеет:
лимб установки заданной температуры стабилизации в пределах (0−100) °С, стрелочный указатель температуры, измеряемой датчиком ТСМ50М в пределах (0…100) °С;
настраиваемую в пределах (0,5…10) °С зону нечувствительности 3-позиционного закона управления;
тумблер переключения режимов управления исполнительным механизмом − «ручной» / «автоматический»;
кнопки управления исполнительным механизмом «больше»/«меньше» при ручном управлении ИМ;
индикаторы направления хода исполнительного механизма (увеличение / уменьшение угла поворота выходного вала);
встроенные «Реле1», «Реле2» для управления ИМ на увеличение
/уменьшение угла поворота выходного вала.
Воснову работы прибора положен мостовой метод измерения сопротивления, зависящего от температуры. Сигнал с измерительного моста, в плечо которого включен датчик, поступает на операционный усилитель. Усиленный сигнал управляет электронным бесконтактным реле, выход которого воздействует на электромагнитные реле, коммутирующее ток нагрузки.
Прибор коммутирует сухими контактами электрическую цепь переменного тока от 2,5 до 6 А напряжением 12–250 В.
Мощность, потребляемая прибором – не более 6 Вт.
На рис. 4.1 регулятор ТМ8 представлен мостовой схемой измерения температуры, элементом сравнения, релейным НЭ и блоком формирования импульсного управления средней скоростью вращения выходного вала исполнительного механизма – «импульсатором».
−24 −
Промышленный исполнительный механизм постоянной скорости типа МЭО включает электродвигатель однофазный конденсаторный (40 Вт, С = 4 мкФ) с частотой вращения ротора
1450 об./мин.
При включенных в регуляторе ТМ6 «Реле1» или «Реле2» напряжение питания 220 В подается на одну из двух автономных обмоток электродвигателя. При этом другая обмотка оказывается подсоединенной к напряжению питания через конденсатор С. Создаваемое конденсатором опережение по фазе тока на этой обмотке совместно с подсоединенной непосредственно к питающей сети генерирует вращающееся электромагнитное поле статора, в результате чего ротор ЭД начинает вращаться в направлении, зависящем от состояний реле.
При отключенных «Реле1» и «Реле2», когда измеряемая величина температуры в ТМ8 находится в пределах зоны нечувствительности «± с», ротор двигателя не вращается:
редуктор, понижающий угловую скорость выходного вала ИМ до величины 180 угл. град./60 с («время хода» Тх = 60 с);
настраиваемые концевые выключатели, ограничивающие вращение выходного вала ИМ в пределах (0−180) угл. град.;
реостат – потенциометр обратной связи R = 200 Ом, который образует мостовую схему совместно с элементами дистанционно-
го указателя угла положения (ДУП) выходного вала ИМ для ин-
дикации текущего угла поворота выходного вала ИМ в пределах (0−100) % по показаниям стрелочного индикатора на лицевой панели ДУП.
Лабораторный автотрансформатор ЛАТР-2, движок которого вращается через механическую связь с выходным валом ИМ в пределах (0−180) угл. град. При этом напряжение на входе ТЭН изменяется в пределах (0−220) В.
Анализ НСАУ
Структурная схема НСАУ для целей анализа представлена на рис. 4.2.
Алгоритм работы релейного регулятора ТМ8 заключается в том, что при рассогласовании δ заданной °tзад и текущей °t температур δ = °tзад − °t, большем или меньшим установленной зоны нечув-
− 25 −

ствительности «± с», соответствующий управляющий сигнал «±1» (контакты электромагнитного реле) регулятора включает или выключает исполнительный механизм (ИМ) в определенном направлении вращения выходного вала.
Рис. 4.2. Структурная схема НСАУ
Например, «+1» − правое вращение, «−1» − левое вращение. Скорость вращения выходного вала асинхронного ЭД зависит
только от частоты питающей сети и числа пар полюсов статора ЭД, а направление вращения выходного вала ЭД изменяется переключением обмоток ЭД.
Схема замещения ИМ с асинхронным однофазным конденсаторным электродвигателем как элемента САУ по каналу «вход – сигнал управления 220 В» → выход − угол ϕ(t) поворота выходного вала ИМ» состоит в виде последовательно включенных 2-пози- ционного НЭ и линейного динамического звена-интегратора в виде рис. 4.3.
Рис. 4.3. Схема замещения асинхронного электродвигателя как элемента САУ. Kим – коэффициент передачи линейной части схемы замещения электродвигателя
Управление асинхронным ЭД со стороны регулятора осуществляется следующим образом (см. рис. 4.3):
− 26 −
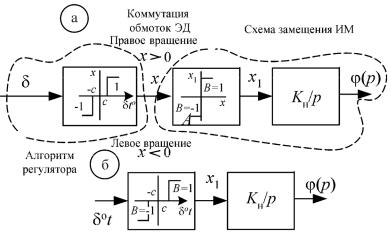
«включено» − в прямом направлении вращения ротора ИМ при напряжении 220 В. Величина В = 1. Выходной сигнал − изменение во времени угла поворота выходного вала ИМ ϕ(t) = = +В Kим t = + Kим t;
«выключено» − напряжение питания равно нулю. Выходной вал ИМ не вращается;
«включено» − в обратном направлении вращения ротора ИМ за счет коммутации обмоток статора при напряжении питания 220 В. Величина В = −1. Выходной сигнал – изменение угла
ϕ(t) поворота выходного вала ИМ ϕ (t) = −В Kим t = − Kим t. Величина Kим определяется по штатным параметрам ИМ – диа-
пазону угла поворота выходного вала ИМ Δϕ = (0−180) угл. град. и временем хода Тх (принято Тх = 60 с), за которое реализуется указанный диапазон углового перемещения Δϕ.
При совмещении закона управления регулятора ТМ8 и схемы замещения асинхронного ЭД (рис. 4.4,а) получаем обобщенную схему закона управления ИМ (рис. 4.4,б).
Рис. 4.4. Формирование совместной схемы замещения закона управления регулятора и асинхронного электродвигателя ИМ
Адекватность замещения схемы рис. 4.4,а схемой рис. 4.4,б подтверждается моделированием по схеме рис. 4.5 в среде MATLAB (Simulink).
− 27 −

Рис. 4.5. Моделирование структуры рис. 4.4,а в среде MATLAB (Simulink)
Расчетная структура НСАУ принимает вид рис. 4.6, где Wл( p) = Kpим Wоу( p) , Wоу(р) – передаточная функция объекта управления.
Рис. 4.6. Расчетная структура НСАУ
Идентификация ТЭН как объекта управления
Первичной задачей инженерного проектирования САУ является идентификация ТЭН как объекта управления, т.е. отождествление ТЭН математической моделью для целей управления.
Идентификация производится экспериментально «методом переходной функции».
Сущность метода заключается в определении передаточной функции управляемого процесса по его реакции на входное ступенчатое воздействие. Ступенчатое воздействие создается малым, 5−10 %-м отклонением от номинального режима регулируемого
− 28 −
параметра в стационарном состоянии процесса штатными средствами воздействия на объект управления.
Процедура экспериментальной идентификации следующая
(рис. 4.7):
1. При средней мощности обдува ТЭН, регулятор ТМ8 переводят в ручной режим управления ИМ. Устанавливают номинальный режим объекта по температуре, например 50 °С, которому физически соответствует угол поворота выходного вала ϕ = 40 % по шка-
ле ДУП, кнопками регулятора для ручного управления ИМ.
2.Отмечают угол поворота Δϕ % в терминах шкалы ДУП. По виду записи изменения температуры на диаграммной ленте самописца выжидают время установления переходных процессов в объекте.
3.При установившемся значении температуры создают скачкообразное возмущение по входной мощности нагрева ТЭН как изменение угла поворота выходного вала от состояния ИМ, соответ-
ствующего номинальному технологическому режиму (принято
ϕ= 40 %), на Δϕ = 10 %.
4.Наблюдают переходную функцию объекта по температуре до индикации установившегося состояния.
5.По виду и параметрам переходной функции определяют передаточную функцию объекта по каналу управления на основании того, что:
переходная функция оценивается близкой к экспоненциальной с
запаздыванием τ, как показано на правой части рис. 4.7; чистое запаздывание τ соответствует времени от момента пода-
чи возмущения до начала изменения температуры объекта; постоянная времени То соответствует величине времени уста-
новления экспоненциальной части переходной функции по уровню 95 % от установившегося значения, деленная на 3;
размерный коэффициент передачи Ко [°C/%] есть отношение приращения температуры °t [°С] к величине приращения угла поворота ИМ в терминах Δϕ [%] показаний ДУП.
6. Cогласно оценкам по рис. 4.7 передаточная функция объекта управления
W |
( p) = |
Kо[оC / %] |
e−τp. |
|
|||
оу |
|
Тор+1 |
|
|
|
||
|
|
− 29 − |
|

В данном случае Kо =1,5, То= 300 с, τ = 60 c.
Рис. 4.7. К определению передаточной функции объекта управления методом переходной функции
7. Определяют переходную функцию объекта по каналу возмущения. Для этого при установившемся процессе изменения температуры в области 40−50 % показаний ДУП при ручном дистанционном управлении объектом переключают вентилятор со средней мощности на полную одновременно с маркировкой момента переключения на диаграмме записи изменения во времени температуры объекта.
Выжидают время установления переходной функции и аналогично смыслу рис. 4.7 определяют передаточную функцию объекта по каналу возмущения.
8. Формулируют структуру ТЭН как объекта управления по каналам управления и возмущения.
Анализ автоколебательного режима
1. При построении ЛАФЧХ линейной части обращают внимание на особенность ЛФЧХ, включающей чистое запаздывание τ = 60 с.
Фазовый сдвиг в функции частоты ϕ (ω) вычисляется по форму-
ле − ϕ(ω) = − ω 57 τ [град.].
Графоаналитическое определение существования совместности решения уравнений «баланса фаз и амплитуд» при параметрах НЭ (в структуре рис. 4.6) с = 1 °С, В = 1, показано на рис. 4.8.
2. Параметры автоколебаний при коэффициенте усиления разомкнутой НСАУ Kс = 0,1: ωавт 0,007 с−1, период автоколебаний
Тавт = 2π/ ωавт = 6,28/0,007 = 897 с−1; μавт = Aавт /с = 4, откуда ам-
плитуда автоколебаний Aавт = 4 1 °C = 4 °С.
− 30 −