

3.1. Определение сил, действующих на звенья механизма и моментов инерции
Массы и моменты инерции звеньев:
а) масса ползунов по формуле

где S – ход ползуна;
б) массу остальных звеньев – по формуле

для кривошипов k = 40 – 60 кг/м, примем k =50 кг/м,
для шатунов k = 8 – 12 кг/м, примем k = 10 кг/м,
в) момент инерции массы звена относительно оси, проходящей через центр масс, определить по формуле

д) центр тяжести звеньев S принять в центре тяжести фигур, их изображающих (за исключением случаев, когда они указаны в задании, - точки на звене).
Силы тяжести звеньев определяются по зависимости

где
g = 9,81
м/ – ускорение свободного падения;
– ускорение свободного падения;
m – масса звена.
Сила приложена в центре тяжести звена S и направлена вертикально вниз.
Как известно, на тело, движущееся с ускорением, действуют силы инерции FИ и моменты сил инерции MИ.
Главный
вектор сил инерции
 приложен в центре тяжести звена S и
направлен противоположно его ускорению
as
приложен в центре тяжести звена S и
направлен противоположно его ускорению
as
Главный
вектор момент сил инерции
 направлен противоположно угловому
ускорению звена ε.
направлен противоположно угловому
ускорению звена ε.
Пусть
массы звеньев будут

Вес
звеньев:



Силы тяжести:



Силы инерции звеньев:



Моменты инерции для звеньев:


Главные моменты сил инерции определяются по формуле

где
ε - угловое ускорение звена, определенное
ранее из кинематического исследования,
 .
.
 ,
,

Моменты сил инерции направлены противоположно угловым ускорениям.
3.2. Силовой расчет группы 2-3

Рисунок 6 – Схема сил для группы звеньев 2-3
Уравнение равновесия группы в форме сил записываем:
∑
Так
как
 и
и
 неизвестны ни по величине, ни по
направлению, поступим следующим образом:
неизвестны ни по величине, ни по
направлению, поступим следующим образом:
∑MB
=
 ;
;
отсюда
выразим
 :
:


На основании yравнения
∑
Строится
план сил грyппы 2-3, масштаб примем

Определим длины отрезков, изображающих векторы сил на чертеже:






Определим
реакции
 ,
,
по величине:
,
,
по величине:



где
 - длины векторов на
плане сил, мм.
- длины векторов на
плане сил, мм.
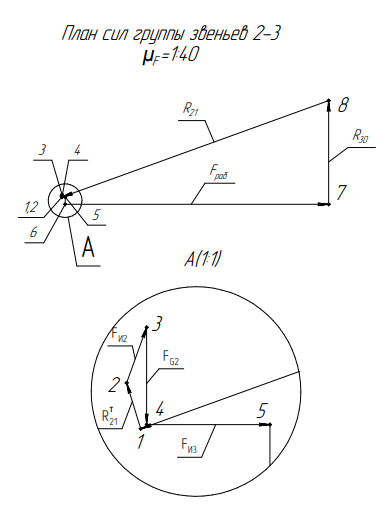
Рисунок 7 – План сил для группы 2-3
3.3. Силовой расчет начального механизма

Рисунок 8 – Схема группы начального звена
Уравнение равновесия звена в форме сил записываем:
∑
Здесь

Строится план сил начального звена, масштаб примем
Определим длины отрезков, изображающих векторы сил на чертеже:


Определим
 из
плана сил:
из
плана сил:
 .
.
 найдем из yравнения равновесия звена
1:
найдем из yравнения равновесия звена
1:

Отсюда:
 .
.
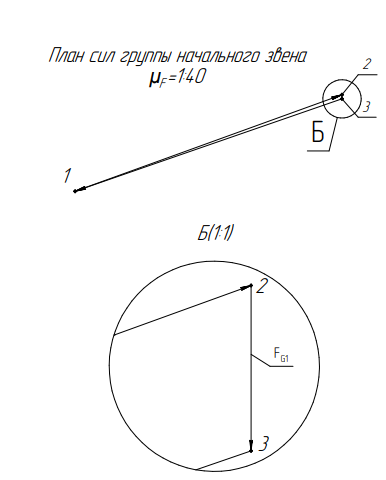
Рисунок 9 – План сил группы начального механизма
3.4. Рычаг Жуковского
1. Строим план скоростей для рабочего положения, повернутый на 90 градусов.
2. Прикладываем к концам соответствующих векторов внешние силы и моменты сил инерции
3. Составляем уравнение суммы моментов:



Здесь






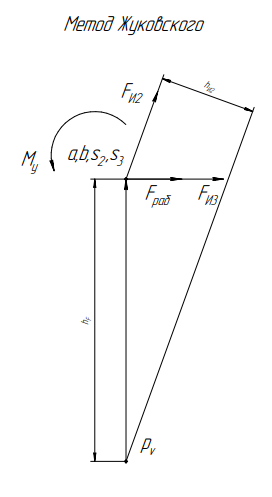
Рисунок 10 - Рычаг Жуковского
4.Погрешность:

3.5 Определение кпд исполнительного механизма
Определяем мгновенную мощность, необходимую для преодоления сил трения в каждой вращательной паре механизма.
Кривошип-стойка (1-0):

где
 – коэффициент трения во вращательной
кинематической паре
– коэффициент трения во вращательной
кинематической паре
 –
радиус
цапфы вращательной пары
–
радиус
цапфы вращательной пары
Кривошип-шатун (1-2):

где
 – угловая скорость звена 1 относительно
звена 2 (направления угловых скоростей
противоположны друг другу).
– угловая скорость звена 1 относительно
звена 2 (направления угловых скоростей
противоположны друг другу).
Шатун-ползун (2-3):

Определим мгновенную мощность, необходимую для преодоления сил трения в каждой поступательной паре механизма:
Ползун-стойка (3-0):

Суммарная мощность на преодоление сил трения в кинематических парах механизма:

Определим работу сил полезного сопротивления за цикл:

где h – ход выходного звена 3.
Время одного оборота кривошипа 1:

Время одного цикла работы механизма:

Мощность сил полезного сопротивления за цикл работы механизма:

КПД исполнительного механизма:
