

МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РФ
Федеральное государственное бюджетное образовательное учреждение высшего образования
“НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ”
Школа базовой инженерной подготовки
Отделение общетехнических дисциплин
ТЕХНИЧЕСКОЕ ЗАДАНИЕ № 10
На курсовой проект по дисциплине «Механика 2»
выдано студенту Кутонов Вячеслав Сергеевич группа 5А93
шифр студента 31710
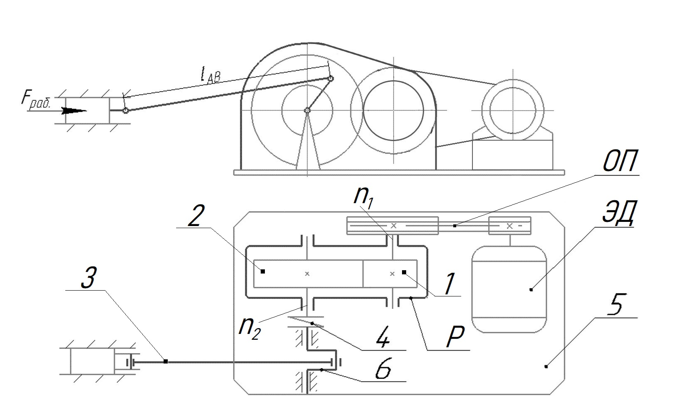
ЭД – электродвигатель;
ОП – открытая цепная передача;
Р – закрытая зубчатая передача (редуктор);
1 – ведущая шестерня редуктора (ведущий вал);
2 – ведомое колесо редуктора (ведомый вал);
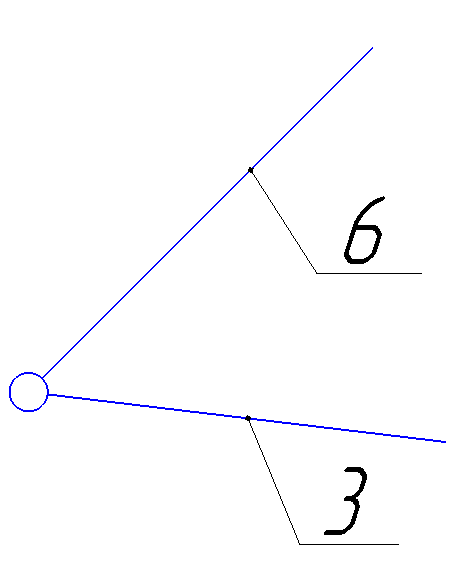
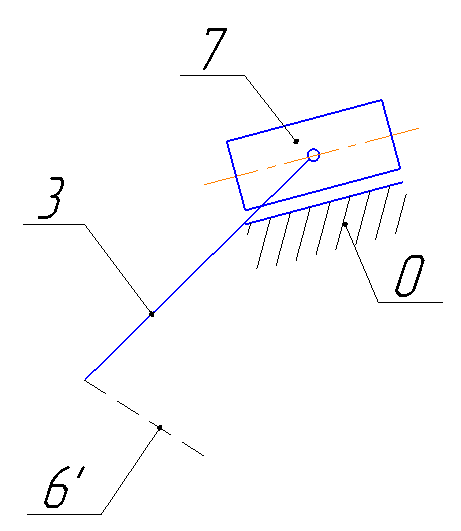
3 – шатун исполнительного механизма;
4 – муфта;
5 – плита;
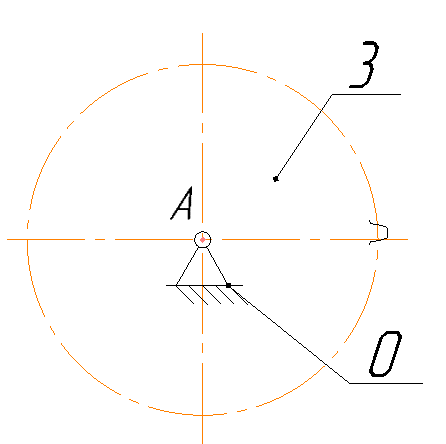
6 – кривошип (коленчатый вал) исполнительного механизма
n1 – частота вращения ведущего вала;
n2 – частота вращения выходного вала редуктора.
Исходные данные:
частота вращения nII = 80 об/мин; длина шатуна lАВ =0,47 м; длина кривошипа lОА =0,16 м; сила полезного сопротивления Fраб = 5 кН срок службы привода h = 6 тыс. час. |
|
Содержание
1. Структурный анализ механизма 2
2. Кинематическое исследование механизма методом планов 6
2.1. Построение планов механизма 6
2.2. Построение планов скоростей 7
9
Рисунок 2 – План скоростей для начального положения 9
2.3. Построение планов ускорений 9
3. Силовой анализ рычажного механизма 12
3.1. Определение сил, действующих на звенья механизма и моментов инерции 12
12
3.2. Силовой расчет группы 2-3 14
3.4. Рычаг Жуковского 18
5) Энергокинематический расчёт электропривода 22
6) Расчёт открытой передачи 24
7) Выбор материала, термообработки и твердости 29
8) расчёт закрытой передачи 34
9) Определение усилия в зацеплении 41
10) Конструирование зубчатых колес передачи. 45
11) Расчёт конструктивных размеров корпуса редуктора. 47
12) Первый этап компоновки. 49
16) Расчет валов на усталостную прочность 57
17) Конструирование подшипниковых узлов 63
18) Расчет шпоночных соединений 65
19) Расчет болтовых соединений 66
21) Сборка редуктора 72
22) Заключение 73
1. Структурный анализ механизма
Цель структурного анализа – выявить строение (структуру) механизма.
При этом необходимо:
Определить число звеньев механизма и назвать каждое из них;
Определить число кинематических пар и дать характеристику (соединения каких звеньев, вид (вращательная, поступательная), характер соприкосновения звеньев (низшая или высшая кинематическая пара), число степеней свободы(класс));
Выявить структурные группы (группы Ассура), входящие в состав механизма; привести схемы групп, назвать их, определить класс группы, написать формулу строения;
Определить степень подвижности механизма (по формуле П.Л.Чебышева);
Привести формулу строения механизма (в общем и развернутом виде).
Таблица 1 – Структурный анализ механизма
Подвижные звенья |
Кинематические пары |
||||||||
Схема |
Название |
Схема |
Название |
Степень подвиж-ности |
Символ |
||||
|
Кривошип-зубчатое колесо |
|
Враща-тельная низшая |
1 |
В0.1 |
||||
|
Кривошип-зубчатое колесо |
|
Зубчатая высшая |
2 |
ВП1.2 |
||||
|
Шатун |
|
Враща-тельная низшая |
1 |
В3,0 |
||||
|
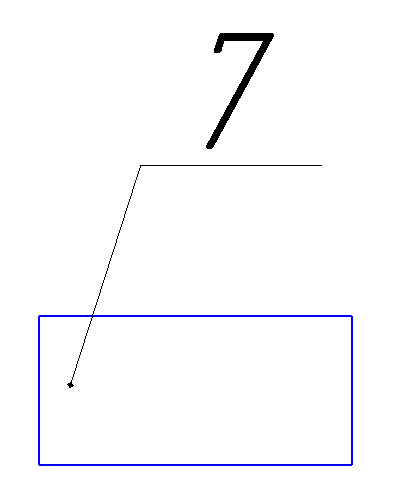
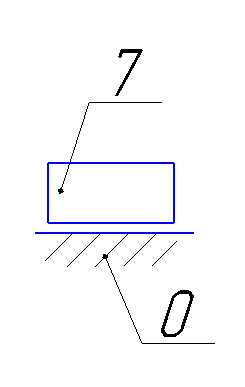
Ползун |
|
Враща-тельная низшая |
1 |
В3,6 |
||||
|
|
|
Враща-тельная низшая |
1 |
В3,7 |
||||
|
|
|
Поступа-тельная низшая |
1 |
П7,0 |
||||
Число звеньев n=4 |
Число кинематических пар Р5=5 Р4=1 |
||||||||
Степень подвижности механизма W=3n - 2Р5 – Р4= 3*4 - 2*5 - 1=1 |
|||||||||
Схема |
Название |
К-во звеньев |
К-во кине-матич. пар |
Формула строения |
|||||
|
Начальный вращательный механизм (1 класса) |
1 |
1 |
В0,1 |
|||||
|
Однозвенная 2-х поводковая группа Ассура с вращательной и зубчатой парой (2 класса) |
1 |
2 |
[ ВП1,2 - В2,0 ] |
|||||
|
2-х звенная, 2-х поводковая группа Ассура с 2-мя вращательными парами и 1-ой поступательной парой |
2 |
3 |
[ В3,6 –В3,7 -П7,0 ] |
|||||
Кол-во начальных механизмов - 1 |
Кол-во групп Ассура- 2 |
||||||||
Формула строения механизма: В0.1- [ ВП1,2 - В2,0 ]-[ В3,6 – В3,7 - П7,0 ]
Механизм 2 класса, содержит две группы Ассура, соединенные последовательно.
|
|||||||||







2. Кинематическое исследование механизма методом планов
Задача кинематического исследования механизма состоит в определении:
- численных значений линейных скоростей всех характерных точек механизма (кинематических пар, центров тяжести) и угловых скоростей всех звеньев для рассматриваемых положений, для чего построить планы скоростей для рабочего положения;
- численных значений линейных ускорений всех характерных точек механизма и угловых ускорений всех звеньев для данных положений, для чего построить планы ускорений для того же положения;
- траекторий некоторых точек звеньев.
частота вращения nII = 80 об/мин;
длина шатуна lАВ =0,47 м;
длина кривошипа lОА =0,16 м;
сила полезного сопротивления Fраб = 5 кН
срок службы привода h = 6 тыс. час.