

материалы за 2021г / литературные источники / [lect] Данилин А.А. - Измерения в радиоэлектронике
.pdfстотомерах используют спиральные многооборотные шкальные механизмы, чтопозволяет увеличить длинушкалы и повысить точность отсчета.
В аналоговых приборах повышенной точности используют световые указатели. В них на полупрозрачную шкалу проектируется рискауказатель, связанная с положением подвижной части отсчетного устройства. Это позволяет получить малый дискрет шкалы, большую ее длину и убрать погрешность параллакса.
Аналоговые отсчетные устройства используют также для фиксации (записи) показаний прибора на бумажный носитель. Это самописцы, построенные на основе магнитоэлектрических измерительных преобразователей. Они обычно имеют дополнительную шкалу для отсчета результата не только на бумаге.
Цифровые средства измерений производят аналого-цифровое преобразование самостоятельно, без участия оператора. Поэтому оконечные устройства в них – это цифровые табло и индикаторы для вывода результата преобразования. Их вид и конструкция определяются эргономическими требованиями и на точность измерения не влияют. Наиболее широко используют цифровые индикаторы на основе светодиодов и жидкокристаллических индикаторов.
В ряде случаев (при настройке радиоэлектронной аппаратуры, поиске максимума измеряемой величины и пр.) использовать цифровые приборы не совсем удобно из-за мелькания цифр на табло. Поэтому цифровой индикатор в ряде случаев дополняют линейным индикатором уровня. Он представляет собой дискретную цепочку точечных индикаторов. Длина светящейся части индикатора показывает уровень измеряемой величины.
Для вывода двумерной информации – формы сигналов, частотных характеристик устройств и пр. – используют экраны и дисплеи. Быстрые сигналы в реальном масштабе времени наблюдают с помощью электрон- но-лучевых осциллографов на экране электронно-лучевой трубки. Цифровые осциллографы в качестве экрана для вывода изображения сигналов используют растровые дисплеи (обычно жидкокристаллические панели). В современных радиоизмерительных приборах широко используют вывод дополнительной символьной и цифровой информации на светодиодные индикаторы, жидкокристаллические панели, на экран ЭЛТ.
Микропроцессорные устройства в средствах измерения
Современная измерительная техника широко использует вычислительные блоки и микропроцессорные системы в составе измерительных приборов. Отметим, что простой ввод в состав измерительного прибора микропроцессора на характеристики результата не влияет. Точность бу-
33
дет определяться метрологическими параметрами аналоговых и аналогоцифровых измерительных преобразователей. Применение микропроцессоров в измерительных прибора позволяетрешить несколькогрупп задач:
•Преобразование цифровой измерительной информации (после АЦП), первичная обработка опытных данных, расчет результатов косвенных измерений, статистическая обработка опытных данных и оценка случайных погрешностей и пр.
•Управление работой прибора, обслуживание органов управления (клавиатуры, ручек и пр.), вывод информации на индикаторы и экран, управление памятью прибора и внешними блоками измерительной схемы (переключателями, двигателями, блоками питания).
•Выполнение одного или нескольких опытов (измерений) по заранее введенномуалгоритму(программное управление).
•Автоматизация прибора – установка пределов измерения без участия оператора, автоматизация процесса уравновешивания в приборах, использующих компенсационные методы измерения, выполнение совместных измерений. Часто полностью автоматизированные приборы называют «интеллектуальными».
Напомним, что под микропроцессором (или микропроцессорной системой – МПС) обычно понимают вычислительное устройство (микроЭВМ), выполненное в виде одной или нескольких интегральных схем (чипов). Микропроцессоры бывают универсальные и специализированные, однокристальные и многокристальные. Универсальные МПС обычно дешевле и проще. К ним существует отработанное стандартное программное обеспечение и хорошая аппаратная поддержка в виде дополнительных плат, блоков, устройств ввода/вывода и пр. Средства измерения
суниверсальными МПС обычно называют вычислительными приборами
соткрытой архитектурой. Специализированные МПС могут обладать лучшими техническими характеристиками (быстродействием, разрядно-
стью, потребляемой мощностью, стоимостью и пр.), однако требуют разработки специального программного обеспечения.
Типовая МПС, используемая в микропроцессорных измерительных приборах, содержит собственно микропроцессор, оперативное запоминающее устройство и постоянное запоминающее устройство, предназначенное для хранения программ управления измерением. Генератор тактовых импульсов МПС задает временной интервал – единицу продолжительности выполнения команды. Чем выше тактовая частота, тем при прочих равных условиях, более быстродействующей является МПС. Интерфейсы ввода и вывода – это устройства сопряжения МПС с органами управления и отсчетными устройствами прибора. Для микропроцессорных измерительных приборов характерны устройства ввода сигналов управления в виде кнопочного пульта на передней панели прибора (выносная клавиатура используется реже – обычно как дополнительная оп-
34
ция). Измеряемые сигналы подают на входные измерительные преобразователи (АЦП, датчики, блоки ввода цифровой информации, счетчики и пр.). Устройства вывода микропроцессорных приборов обычно представляют собой цифровые табло либо экран (дисплей). Современные вычислительные устройства, как правило, используют стандартные устройства хранения информации – жесткие диски и USB – флеш-карты.
Все блоки МПС связаны между собой магистральными шинами передачи цифровой информации. Количество линий в шине данных обычно соответствует количеству бит в слове данных МПС (обычно 8, 16 бит). Шина адреса применяется для указания ячейки памяти или блока вводавывода, которые получают или передают информацию в данный момент. Шина управления служит для передачи сигналов, синхронизирующих всю работуМПС.
Таким образом, микропроцессорный прибор выглядит как микроЭВМ с дополнительными измерительными блоками, характерными для традиционных цифровых приборов. В вычислительных приборах с открытой архитектурой используют встроенные МПС широко распространенных персональных компьютеров с операционной системой Windows.
Основные достоинства микропроцессорных средств измерения по сравнению с традиционными цифровыми приборами с аппаратной логикой работы.
Повышенная точность. Она достигается за счет:
•исключения систематических погрешностей в процессе самокалибровки прибора, коррекции смещения нуля, учета собственной АЧХ, нелинейности измерительных преобразователей. Самокалибровка в данном случае – это измерение поправок или поправочных множителей и запоминание их в ОЗУ с целью использования на этапе обработки опытных данных;
•уменьшения влияния случайных погрешностей путем проведения многократных измерений с последующей обработкой выборки – усреднением, вычислением мат. ожидания и пр.;
•выявления и устранение грубых погрешностей (промахов);
•определение и вывод на индикатор оценки погрешности прямо в процессе измерения.
Многофункциональность. Замена совокупности различных измерительных приборов одним, многофункциональным. Такая замена в приборах с «жесткой» логикой неэкономична, так как добавление новой функции требует установки дополнительного измерительного блока. Программируемая логика позволяет сделать это всего лишь добавлением блока программы.
Компенсация внутренних шумов позволяет повысить чувствительность средства измерения и снизить погрешности измерения при малых
35
входных сигналах. Ее выполняют вычислительным способом, проводя многократные измерения и усредняя их результаты. Другой вариант компенсации – цифровая фильтрация временной последовательности мгновенных значений сигнала. В программном обеспечении прибора предусматривают цифровую фильтрацию отсчетов измерительного сигнала, поступающих с АЦП в реальном масштабе времени.
Расширение измерительных возможностей путем использования косвенных, совместных и совокупных измерений, воспринимаемых оператором в этом случае как прямые. Результат обработки опытных данных в микропроцессорном приборе выводится на индикатор практически сразу после проведения измерения. Микропроцессор осуществляет управление процессом измерения по программе и проводит обработку опытных данных. Результат расчетов воспринимается оператором как результат прямых измерений, посколькурасчет делается быстро.
Упрощение и облегчение управления прибором. В автоматических микропроцессорных приборах управление производится путем переключения блоков программ с кнопочной панели. Чем меньше кнопок, тем более «разумным» является прибор. Автоматизация установок прибора приводит к упрощению его использования (автоматических выбор пределов измерения, самокалибровка и пр.). Полезен контроль за ошибочными действиями оператора с индикацией его неверных действий на табло или экране.
Математические операции с результатом измерений – умножение на константу, вычисление отклонения от эталона, смещение (вычитание константы), вывод в процентах, представление в логарифмических величинах, ввод характеристик датчиков и пр.
Статистическая обработка данных, получение характеристик случайных сигналов – математического ожидания, дисперсии, коэффициента корреляции и др.
Запоминание большого объема данных и при необходимости воспроизведение их из памяти. В современных приборах для этого предусматриваютрасширенную память ОЗУ и жесткие диски большого объема.
Упрощение организации измерительных систем. Микропроцессор позволяет программно реализовать интерфейсные протоколы, необходимые для включения прибора в измерительную систему.
Малые габариты, высокая надежность, небольшая потребляемая мощность (по сравнению с приборами с жесткой логикой). Самотестирование – программное выявление неисправностей и сбоев в работе – повышает надежность.
Сокращение времени разработки приборов за счет унификации кон-
струкции аппаратной части. Проектирование новогоприбора сводится к разработкеалгоритма функционированияприбора инаписаниюпрограммы.
36
К недостаткам микропроцессорных приборов следует отнести:
•ограниченное быстродействие МПС широкого применения. Это не позволяет использовать такие приборы на ВЧ и СВЧ без дополнительных аналоговых преобразователей (детекторов, переносчиков частоты), которые существенно снижают точность измерения. Быстродействующие микропроцессорные системы довольно громоздки, потребляют много энергии и дорого стоят;
•сложность управления микропроцессорным прибором, особенно при малом уровне автоматизации. Пока еще отсутствуют единые стандарты программирования управления таких приборов;
•трудности программирования при недостаточной памяти программ и ограниченном быстродействии МПС;
•сложности диагностики неисправностей и ремонта микропроцессорных приборов;
•дороговизна по сравнению с аналоговыми и цифровыми приборами с аппаратной логикой работы.
Области использования микропроцессорных приборов:
•многофункциональные приборы с возможностью расширения функциональности (путем замены программного обеспечения);
•приборы с большим количеством входных устройств (датчиков);
•средства измерения с запоминанием большого объема данных;
•приборы, реализующие косвенными и совместные измерения;
•вычислительные приборы, проводящие обработку опытных данных, оценку погрешности в процессе измерений, математические преобразования результатов измерений и пр.
Наиболее целесообразно использовать микропроцессоры в следующих видах измерительных приборов:
•многопредельные мультиметры;
•измерительные мосты с автоматическим уравновешиванием;
•запоминающие приборы;
•приборы с обработкой большого объема данных (цифровые осциллографы, характериографы, анализаторы спектра);
•автоматические приборы.
Программное обеспечение микропроцессорных приборов включает:
•программы реализации метода измерения;
•программы обслуживания измерительных преобразователей (АЦП и др.);
•программы калибровки и коррекции систематических погрешностей (дрейфа и смещения нуля и пр.);
37
•программы цифровой обработки и фильтрации измерительных сигналов(например, усреднение данных повыборке, сглаживание шумов);
•программы автоматизации процесса измерения (выбор пределов измерения, оптимальных параметров преобразователей);
•программное обеспечение математической обработки результатов измерений (сравнение результатов с номиналом, масштабное преобразование и др.);
•программное управление измерениями (программируемые приборы).
Особенности программирования для МП приборов связаны, в ряде случаев, с ограниченным объемом ПЗУ программ. Требуется разрабатывать компактные программы с использованием языков низкого уровня (Ассемблер). Другая особенность программного обеспечения связана с работой прибора в режиме «реального времени». Должна быть выдержана синхронность между поступлением измерительной информации и выполнением необходимых программных действий. Требования к быстродействию таких программ обычновысоки. Они должны обеспечивать также повышенная надежность. При наличии ошибок в программном обеспечении прибор становится неработоспособным, а корректировка и исправление программныхкодовпользователем, какправило, непредусматривается.
Из-за сложности ввода/вывода управляющей информации в измерительных приборах часто отсутствует возможность управления командной строкой. Ввод обычно ограничен цифровой информацией с передней панели прибора, вывод на цифровое табло не предусматривает расширенную текстовую информацию.
В микропроцессорных приборах обычно используют модульное построение программ. Это позволяет использовать в различных приборах одинаковые программные фрагменты.
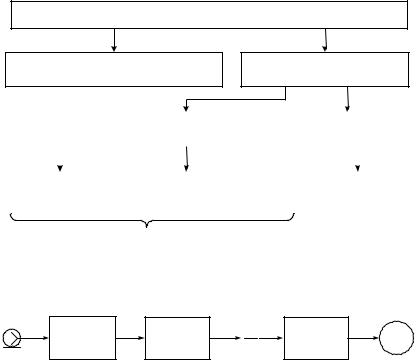
Методы измерения и структурные схемы средств измерения
Общие методы измерения можно разделить на две группы, отличающиеся способом использования меры единицы физической величины
(рис. 1.7).
Методы непосредственной оценки реализуют в схеме прямого преобразования. Структурная схема прибора, реализующего метод непосредственной оценки – это цепочка измерительных преобразователей (ИП) (рис. 1.8).
Входной сигнал преобразуется измерительными преобразователями и выводится на отсчетное устройство (ОУ). Численное значение результата отсчитывают по шкале предварительно отградуированного ОУ. Сопоставление измеряемой и образцовой величин в этом методе разновремен-
38
ное. Мера единицы измерения в состав прибора не входит; она используется только при градуировке шкалы. Поэтому нестабильность измерительных преобразователей и отсчетного устройства нарушает градуировкушкалы и снижает точность измерения.
Методы измерений
Методы непосредственной оценки
Методы сравнения с мерой
(прямого преобразования)
|
|
|
Компенсационные методы |
|
|
Метод совпадения |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нулевой метод |
|
|
Дифференциальный метод |
|
|
Метод замещения |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Методы уравновешивания
Рис. 1.7. Классификация методов измерений
Вход
ИП1 |
ИП2 |
ИПn |
ОУ |
Рис. 1.8. Схема прямого преобразования для метода непосредственной оценки
Методы сравнения с мерой позволяют произвести сопоставление значения меры (эталона) с измеряемой величиной непосредственно в процессе измерения. Эти методы по сравнению с методом непосредственной оценки более точны, но несколько сложнее. Сравнение может быть одновременным, когда мера и измеряемая величина воздействуют на измерительный прибор одновременно, и разновременным, когда воздействие измеряемой величины и меры на измерительный прибор разнесено во времени.
Различают несколько способов сравнения с мерой:
•метод совпадения;
•компенсационныеметоды(нулевой, дифференциальныйи замещения).
39
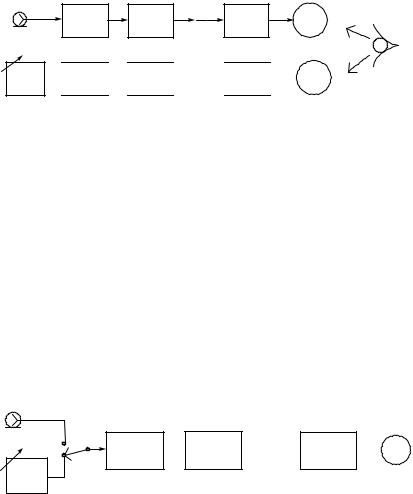
Метод совпадения (или метод «нониуса») – одновременный метод, в котором измеряемую величину и значение, воспроизводимой мерой, сравнивают, используя совпадение показаний двух отсчетных устройств
(рис. 1.9).
Вход |
|
|
оператор |
|
|
|
|
ИП1 |
ИП2 |
ИПm |
ОУ1 |
Мера 
 ИП1
ИП1 
 ИП2
ИП2 



 ИПn
ИПn 
 ОУ2
ОУ2
Рис. 1.9. Схема реализации метода совпадения
Пример метода совпадения – использование нониуса в штангенциркуле для измерения длины с точностью до десятых и сотых долей миллиметров. В радиоэлектронике метод совпадения используют редко.
Компенсационные методы сравнения с мерой делят на метод замещения и методы уравновешивания (противопоставления).
Метод замещения – разновременный метод, в котором измеряемую и образцовую величины по очереди подают на измеритель. Регулируя меру, добиваются одинаковых показаний на отсчётном устройстве
(рис. 1.10).
Метод замещения характерен тем, что его точность мало зависит от параметров элементов измерительной схемы. Измерительные преобразователи не требуют калибровки, шкала отсчетного устройства – предварительной градуировки. Основное требование к этим элементам – стабильность коэффициента преобразования в течение процесса измерения.
Вход
ИП1  ИП2
ИП2 

 ИПn
ИПn  ОУ
ОУ
Мера
Рис. 1.10. Схема реализации метода замещения
Методы уравновешивания характерны тем, что измеряемая величина и величина, воспроизводимая мерой, одновременно воздействуют на устройство сравнения (компаратор), с помощью которого определяют
40
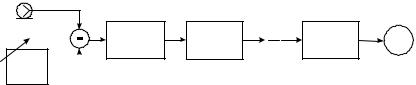
соотношение между этими величинами. Чаще всего для сравнения используют вычитающее устройство (рис. 1.11).
Вход
ИП1 |
ИП2 |
ИПn |
ОУ |
Мера 
Рис. 1.11. Схема реализации метода уравновешивания
Если после регулировки значения меры разность на его выходе – нуль, то измеряемая величина и мера равны. Такой вариант называют нулевым методом уравновешивания. Результат измерения отсчитывают по шкале меры. Момент равенства нулю фиксируют схемой прямого преобразования, которую называют нуль-индикатор. Примеры нулевого метода – четырехплечий мост для измерения сопротивления, весы с гирька- ми-разновесами и др.
Дифференциальный метод отличается от нулевого тем, что разность измеряемой величины и известной величины, воспроизводимой мерой, не доводится до нуля, а измеряется прямым методом. Результат измерения в этом случае есть сумма показаний отсчетного устройства и значения меры. Дифференциальный метод требует калибровки шкалы индикатора в единицах измеряемой величины, что несколько усложняет его использование. Однако в ряде случаев фиксировать ненулевое значение разности удобнее, так как на результат не влияют внутренние шумы прибора.
Контрольные вопросы
1.Дайте определение понятию «измерение». Чем измерение отличается от других способов определения значения физической величины?
2.Что такое «прямые» и «косвенные» измерения? Почему в современных радиоизмерительных приборах эти виды измерений часто не разделяют?
3.Какие задачи решают на этапе планирования измерений?
4.Что входит в обработку опытных данных? В каких случаях обработку проводить не требуется?
5.Что такое «измерительный сигнал»? Какие бывают виды измерительных сигналов? Чем помехи отличаются от полезных сигналов?
6.Дайте определение модулированного радиосигнала. Какие виды модуляции встречаются в измерительных задачах?
41
7.Какие элементарные средства измерений используют при построении измерительных приборов? Чем мера отличается от эталона единицы физической величины?
8.Что такое «измерительный преобразователь»? Какие измерительные преобразователи вы знаете?
9.Что такое «комплексное средство измерений»? Чем измерительная установка отличается от измерительного прибора?
10.Дайте определения аналогового и цифрового средства измерения. Чем они отличаются?
11.Дайте определение измерительной системы. В чем отличие измерительной установки от измерительной системы?
12.Что такое «чувствительность средства измерения» и «порог чувствительности» средства измерения? Чем ограничена чувствительность сверхуи снизу?
13.Что такое «разрешающая способность» аналогового и цифрового средства измерения? Укажите способы улучшения этого параметра.
14.Какие эталоны и меры электрических величин используют в радиоизмерительных устройствах?
15.Какие измерительные преобразователи уровней сигналов используют в радиоизмерительных приборах?
16.Для чего используют измерительные преобразователи частоты сигналов? Какие виды преобразователей частоты вы знаете?
17.Для чего используют измерительные преобразователи формы сигнала? Какое преобразование выполняет детектор?
18.Что такое аналого-цифровой и цифро-аналоговый преобразователи? Какой основной параметр этих устройств?
19.Какие функции выполняют микропроцессорные устройства в составе средств измерения? Какие преимущества имеют микропроцессорные измерительные приборы?
20.Укажите основные методы измерений. В чем преимущество методов сравнения с мерой?
21.В чем отличие метода уравновешивания от метода замещения? Какой метод более точный?
42