

материалы за 2021г / литературные источники / [lect] Данилин А.А. - Измерения в радиоэлектронике
.pdfчастотно – фазовых детекторах изменение частоты преобразуется в изменение фазового сдвига между двумя напряжениями с последующим фазовым детектированием. В частотно – импульсных детекторах ЧМ сигнал преобразуется в один из видов импульсной модуляции.
На рис. 9.6, а представлен частотный детектор, основанный на преобразовании ЧМ в частотно-импульсную модуляцию последовательности прямоугольных импульсов. Входной усилитель-ограничитель (триггер Шмидта) преобразует синусоидальный сигнал в прямоугольный (меандр) с сохранением закона изменения частоты (периода). Дифференцируя сигнал на выходе ограничителя и выделяя только положительные импульсы, получают последовательность кратковременных импульсов с тем же законом модуляции по частоте (рис. 9.6, б). Эти импульсы запускают ждущий генератор одиночного импульса (одновибратор). На выходе генератора получается последовательность одинаковых прямоугольных им-
пульсов длительностью τи и амплитудой U0 . (сигнал с частотно-
импульсной модуляцией). Сглаживающим фильтром НЧ выделяют напряжение, повторяющее закон модуляции частоты. Его амплитуда пропорцилнальная девиации частоты исходного радиосигнала.
u1 |
Триггер |
u2 |
|
|
|
Г |
u3 |
ФНЧ |
u4 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а
u1
u2
u3  U0
U0
и
u4
б
Рис. 9.6. Счетный ЧМ детектор:
а – структурная схема, б – осциллограммы сигналов
223
t
t
t
t

Достоинством такого детектора является малая погрешность (2–3%) в диапазоне девиации частоты f < 1 МГц, высокая линейность преобра-
зования. Недостатком является невысокая помехоустойчивость (сильное влияние импульсных помех на результат демодуляции).
Для измерений девиации частоты в условиях помех используют ча- стотно-амплитудные и частотно-фазовые детекторы (ЧД). Упрощенная структура частотно-фазового демодулятора представлена на рис. 9.7, а.
|
Uвых(f) |
|
+ |
Амплитудный |
|
детектор 1 |
||
|
||
t |
_ |
|
_ |
f |
|
Амплитудный |
||
|
детектор 2 |
Рис. 9.7. ЧМ-детектор с линией задержки:
а – структурная схема, б – измерение напряжения на выходе при ЧМ
Он содержит устройство задержки с линейной фазо-частотной характеристикой (ФЧХ) для преобразования закона изменения частоты в закон изменения начальной фазы сигнала. В качестве устройства задержки можно использовать колебательный контур, настроенный на промежуточную частоту. Наклон ФЧХ и, соответственно, время задержки задают выбором добротности контура. Далее ЧМ-сигнал подают на балансный фазовый детектор, подробно рассмотренный далее в главе, посвященной измерению фазового сдвига. Он состит из сумматора и вычитателя, двух детекторов и вычитающего устройства (например, дифференциального усилителя) на выходе. Фазовый детектор выделяет НЧ-сигнал, функционально связанный с изменением фазы (а, следовательно, и частоты) гармоническим законом (рис. 9.7, б):
Uвых ≡ cos( ϕ) = cos(2πf (t) τз) .
Если выбрать время задержки τз на промежуточной частоте fПЧ из
соотношения |
2πfПЧ τз = |
π |
+ (2n + 1)π, гдеn = 0, 1, 2..., то частотный де- |
|
|
4 |
|
тектор будет работать на участке характеристики, близкой к линейной. На выходной сигнал влияет паразитная АМ входного сигнала, поэтому перед детектором необходимо предусмотреть амплитудный ограничитель для стабилизации амплитуды сигнала.
Схема частотно-амплитудного детектора с расстроенными контурами представлена на рис. 9.8
224

VD1
f2 |
Uвых |
R1 |
C1 |
|
f1 |
uвх |
Uвых |
|
f2 f |
R2 |
C2 |
VD2 |
|
f1 |
|
a |
б |
Рис. 9.8. ЧМ-детектор на расстроенных контурах:
а – структурная схема, б – осциллограмма напряжения на выходе
Первый из контуров настроен на частоту f1 ниже средней частоты принимаемого ЧМ сигнала, второй – на частоту f2 выше средней. Вели-
чина расстройки контуров выбирается несколько больше максимальной девиации частоты, чтобы работа ЧД проходила на одной из ветвей резонансной кривой контуров. Если частота сигнала возрастает, то она приближается к резонансной частоте первого контура и удаляется от частоты настройки второго контура. Напряжение на первом контуре увеличивается, а на втором уменьшается. При понижении частоты сигнала, наоборот, увеличивается напряжение на втором контуре и уменьшается на первом. ЧМ радиосигнал превращается в амплитудно – частотно – модулированный. Он детектируется двумя диодными детекторами, выходные напряжения которых вычитают. В итоге на выходе ЧД формируется напряжение, линейно зависящее от частотной расстройки входного сигнала (рис. 9.8, б). Частотный детектор с расстроенными контурами обладает хорошими показателями, но сложен в изготовлении и настройке. Иногда он находит применение в диапазоне СВЧ, где в качестве резонансных контуров в нем используют объемные резонаторы.
Частотные детекторы, описанные выше, просты по конструкции и малочувствительны к шумам и помехам во входном сигнале. Однако они имеют небольшой диапазон измерения девиации частоты и невысокую точность.
Для оценки параметров модуляции реальных радиосигналов, существующих в условиях повышенного уровня помех, применяют более сложные приборы – измерительные приемники (вид П5). Это специализированные радиоприёмники для измерения уровня и частоты радиосигналов с нормированными метрологическими характеристиками. В
225
них обычно предусматривают также дополнительные функции: анализ спектра сигнала, сканирование по диапазону частот с целью поиска источников сигналов или помех, измерение коэффициента и индекса модуляции. Для определения параметров радиоизлучения в пространстве измерительный приёмник комплектуют измерительными антеннами. Основные преимущества измерительного приемника – более высокая по сравнению с анализатором спектра чувствительность и наличие на входе перестраиваемых полосовых (преселекторных) фильтров. Предварительная фильтрация существенно повышает помехозащищенность в условиях плотной загрузки радиодиапазонов, характерных для задач радиоконтроля.
Отметим, что в связи с интенсивным развитием систем подвижной и спутниковой радиосвязи, широким внедрением цифровых методов модуляции требования к аппаратуре анализа параметров радиосигналов возросли. На смену последовательным анализаторам спектра и измерительным приемникам с простыми АМ- и ЧМ-демодуляторами приходят новые универсальные приборы – анализаторы модуляции. С их помощью можно проводить измерение параметров АМ и ЧМ радиосигналов как в частотной, так и во временной областях.
Измерение параметров векторной модуляции
В настоящее время аналоговая модуляция во многих случаях уступает место цифровой, в которой сигнал несущей частоты модулируется не аналоговым информационным сигналом, а цифровой битовой последовательностью. Для таких сигналов применяют различные виды дискретной модуляции. В качестве примера рассмотрим уже упоминавшуюся выше
квадратурную амплитудную модуляцию (манипуляцию) (КАМ или
QAM)). При такой модуляции меняют как фазу, так и амплитуду, что позволяет увеличить количество информации, передаваемой одним состоянием (отсчётом) сигнала.
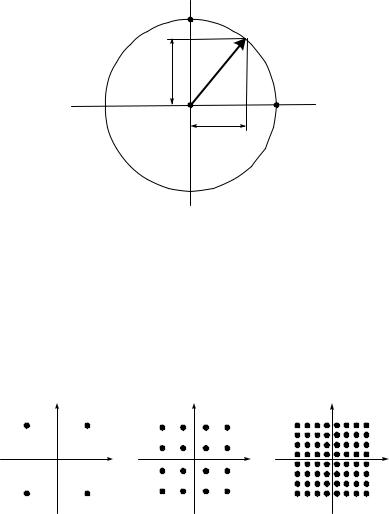
Для описания КАМ используют векторное представление сигнала, то есть отображение вектора его комплексной огибающей в полярной системе координат. Вещественная координата определяется напряжением I(t), синфазным с несущим колебанием, а мнимая – квадратурным (сдви-
нутым на 90°) Q(t) (рис. 9.9).
Такое представление позволяет рассматривать любую точку в полярных координатах в виде набора координат напряжений (I, Q) либо в виде вектора, определяемого амплитудой и фазой (рис. 9.9). Аналитическое выражение для КАМ сигнала с несущей частотой f имеет вид:
u(t) = I (t)cos(2πf t + ϕ) − Q(t)sin(2πf t + ϕ)
226
1Q(t)
Q
0 |
I |
1 I(t) |
Рис. 9.9. Диаграмма состояний векторной модуляции
В самом простом случае модуляции (4–QAM) синфазная и квадратурная компоненты могут принимать по два значения, что позволяет кодировать два бита информации одним состоянием сигнала. В этом случае вектор комплексной огибающей может принимать одно из 4-х положений, что отражается на диаграмме состояний в виде 4 точек (состояний) (рис. 9.10).
4-QAM |
16-QAM |
64-QAM |
Q |
Q |
Q |
I |
I |
I |
Рис. 9.10. Диаграммы состояний сигнала при различных видах квадратурной амплитудной модуляции
Такое представление диаграммы состояний принято называть созвездием (constellation). Диаграмма состояний для простого сигнала с амплитудной или фазовой манипуляциями содержит всего две точки, что соответсвует одному биту цифрового кода. На практике чаще используют более сложные виды модуляции 16–QAM и 64–QAM, которые одним состоянием сигнала позволяют передавать соответственно 8 и 32 бита цифрового сообщения.
227

Для демодуляции (декодирования) цифрового КАМ-сигнала надо определить положение конца вектора комплексной огибающей, который должен располагаться на одной из точек созвездия. Поскольку КАМ сигнал представляет собой двухкомпонентный (векторный) процесс, отражающий изменения во времени амплитуды и фазы исходного сигнала, то декодировать такой сигнал с помощью амплитудного и фазового детекторов сложно. На практике сигнал с цифровой модуляцией анализируют с помощью квадратурных демодуляторов, представляющих собой сочетание двух синхронных детекторов (рис. 9.11)
I(t)/2




cos(2πft)
uвх(t)
Г900
sin(2 ft)
-Q(t)/2




Рис. 9.11. Квадратурный векторный демодулятор
Принцип действия демодулятора – умножение входного модулированного сигнала на гармонические функции sin и соs (квадратурная пара):
uI (t) = U (t)cos(2πft + ϕ(t)) cos(2πft) =
= [I (t)cos(2πft) − Q(t)sin(2πft)] cos(2πft) =
... = 12 [I (t) + I(t)cos(4πft) − Q(t)sin(4πft)];
uQ (t) = U (t) cos(2πft + ϕ(t)) sin(2πft) =
= [I (t) cos(2πft) − Q(t)sin(2πft)] sin(2πft)
= 12 [−Q(t) + I (t)sin(4πft) + Q(t) cos(4πft)].
Фильтрация составляющих с удвоенной частотой на выходе перемножителей позволяет выделить напряжения, равные половине составляющих I и Q исходного сигнала. Амплитуды этих сигналов определяют координатувектора комплексной огибающей исходного сигнала (модуль и фазу).
228

Если необходимо выделить сигнал АМ, квадратурные компоненты надо податьна функциональныйпреобразователь, дающиймодульогибающей
U (t) = I (t)2 + Q(t)2 .
Сигнал фазовой модуляции определяется через отношение компонент
|
Q(t) |
|
Δϕ(t) = arctan |
|
. |
|
||
|
I(t) |
|
Для демодуляции ЧМ полученный сигнал ФМ необходимо продифференцировать по времени как сложную функцию
|
d |
Q(t) I (t) − |
d |
I (t) Q(t) |
|
|
f (t) = |
dt |
dt |
. |
|||
|
|
|||||
|
2π (I (t)2 + Q(t)2 ) |
|||||
|
|
|
||||
Анализ параметров радиосигналов наряду с их обнаружением составляет однуиз основных операций радиоконтроля цифровых каналов связи. В процессе анализа измеряют интересующие характеристики обнаруженного радиосигнала, такие как несущая частота, уровень, форма и ширина спектра, параметры модуляции и т. д. Результаты этих измерений используются для проверки соответствия параметров контролируемых систем установленным нормам.
Для исследования сигналов с цифровой модуляцией используют специализированные анализаторы модуляции, векторные анализаторы спектра ВЧ, измерительные приемники, цифровые осциллографы с программным обеспечением для демодуляции. Для широкополосных сигналов на высоких частотах используют аналоговые демодуляторы, которые позволяют выделить его квадратурные компоненты. Комплексная огибающая на его выходе является относительно низкочастотным сигналом, который проще дискретизировать и обработать программными средствами. Квадратурный демодулятор выделяет I/Q компоненты комплексной огибающей сигнала в полосе частот, которая называется полосой параллельной обработки. В этой полосе производиться дискретизация компонент и дальнейшая вычислительная обработка. Максимальная полоса обработки ограничена быстродействием АЦП анализатора и производительностью его сигнального процессора. Для исследования и демодуляции сигналов высокоскоростных интерфейсов требуются полосы параллельной обработки порядка нескольких МГц. После аналогоцифрового преобразования цифровые реализации I и Q хранятся в памяти цифрового сигнального процессора. Располагая I/Q-реализациями, процессор вычисляет спектр входного радиосигнала, а также модулирующие функции, описывающие поведение во времени амплитуды, частоты и фазы принимаемого сигнала. Обработка (например, вычисление спектра) текущей реализации может выполняться параллельно с про-
229

цессом регистрации следующей реализации, что позволяет строить анализаторы реального времени.
Im |
Im |
1.0 |
1.0 |
0.5 |
0.5 |
0.0 |
0.0 |
-0.5 |
-0.5 |
-1.0 |
-1.0 |
-1.0 -0.5 0.0 0.5 1.0 Re |
-1.0 -0.5 0.0 0.5 1.0 Re |
Рис. 9.12. Результаты измерения векторной диаграммы сигнала:
а– временная диаграмма цифровой последовательности,
б– результат ее декодирования в виде созвездия
Для относительно узкополосных сигналов в векторных анализаторах модуляции используют дискретизацию входного сигнала без аналоговой демодуляции. Цифровые отсчеты обрабатываются программой «цифрового квадратурного модулятора». Программная реализация функций демодулятора позволяет в реальном времени выделять и оценивать параметры сразутрех модулирующих процессов: амплитуды, фазы и частоты, а также измерять их параметры (например, глубину амплитудной модуляции или девиацию частоты). Полученные результаты измерения I/Q компонент комплексной огибающей сигнала и результаты расчетов параметров сигнала выводятся в виде созвездия, раскодированных информационных битов, частотного спектра, модуля векторной ошибки и т. д. Наиболее информативен векторный формат – представление комплексной огибающей в полярных координатах на комплексной плоскости. Модуль вектора отражает мгновенную амплитуду (огибающую) сигнала, а угол – текущее значение фазы. Анализ траекторий комплексного вектора при изменении времени (рис. 9.12, а) позволяет распознать вид модуляции и оценить ее параметры (рис. 9.12, б).
Синфазная и квадратурная компоненты временных зависимостей демодулированных напряжений I и Q на выходе квадратурного демодулятора могут отображаться на экране анализатора в виде осциллограмм в декартовых координатах. Если осциллограмма синхронизируется тактовой частотой принимаемого сигнала, то отображение принимает вид «глазковой» диаграммы.
Погрешность векторной модуляции исследуемого цифрового сигнала оценивают расстоянием от точки, соответствующей измеренномувектору
230

до точки, заданной созвездием выбранного стандарта модуляции. Наиболее распространенным параметром, описывающим погрешность модуляции, является модуль вектора ошибки error vector magnitude (EVM):
|
M |
|
|
|
|
|
||||
|
|
|
Vk − Rk |
|
2 |
|
||||
|
|
|
||||||||
EVM = |
k =1 |
|
|
|
|
|
|
|
, |
|
|
M |
|
|
|
||||||
|
|
|
Rk |
|
2 |
|
|
|
||
|
|
|
|
|
|
|||||
k =1
где Rk – вектор напряжений на диаграмме состояний, соответствующий «идеальному» положению k-го символа из выборки длиной М; Vk – вектор, соответствующий измеренномуположению k-го символа.
На точность измерения параметров векторной модуляции влияют параметры использованных устройств и программ:
•погрешности аналоговых блоков анализатора модуляции, вызванные собственными тепловыми шумами, фазовыми шумами гетеродина, нелинейностью смесителя, гармоническими и негармоническими искажениями, нелинейностью АЧХ и ФЧХ, погрешностью установки частоты гетеродина;
•погрешности АЦП – его нелинейность, погрешность квантования, погрешность частоты дискретизации;
•погрешности алгоритма обработки цифровых данных.
Минимальные погрешности измерения EVM для современных векторных анализаторов модуляции лежат в диапазоне 0.3…0.5 %. При возрастании частоты несущей, скорости модуляции (полосы модуляции) или усложнении схемы модуляции погрешность измерения будет возрастать.
Контрольные вопросы
1.Что называют «радиосигналом»? Какие виды модуляции используют в радиосигналах?
2.Какие параметры модулированного радиосигнала необходимо измерять? Какие средства измерения для этого используют?
3.Как использовать осциллограф и анализатор спектра для измерения коэффициента АМ и девиации частоты ЧМ?
4.Что такое модулометр и девиометр? Опишите принцип действия и структурную схемуэтих приборов.
5.Какие виды детекторов используют в измерителях модуляции? Как устроен частотный детектор для измерения девиации частоты?
231

Глава 10
Измерение частоты и временных интервалов
Аналоговые методы измерения частоты
Частота радиосигнала – важный параметр, который требуется измерять с высокой точностью. Реальный источник сигнала характеризуется временной зависимостью ухода мгновенной частоты f(t) от номинального значения (рис. 10.1)
f, f |
f(t, ) |
|
|
f(t) |
|
|
t |
fm |
|
|
|
0 |
Ta |
t |
Рис. 10.1. Характер изменения мгновенной частоты сигнала
Различают несколько задач, связанных с измерением частоты. Это определение средней частоты сигнала, измерение нестабильности частоты (долговременной и кратковременной), измерение частоты заполнения радиоимпульсов. Закон изменения частоты во времени можно представить в виде совокупности медленного дрейфа частоты (девиация частоты
fД ) за выбранное заранее время Т (долговременная нестабильность) и
быстрых флуктуаций частоты в течении малого времени τ (кратковременная нестабильность).
Долговременная нестабильность является функцией абсолютного времени t и длительности интервала наблюдения Т, на котором измеряют
232