

Усе
.pdf
|
F |
|
f |
M m |
, |
(2) |
|
|
|||||
|
|
r 2 |
||||
|
|
|
|
|
|
де f – гравітаційна стала, r – відстань від центра маси Землі M до супутника m. Вектор сили взаємодії Землі і супутника, виходячи із закону (2), виразиться так:
F f |
M m |
|
r |
. |
(3) |
r 2 |
|
||||
|
|
r |
|
||
Тут r – вектор положення супутника, а його складовими у прийнятій геоцентричній системі - є координати ШСЗ, тобто
x
r y . (4)
z
Прирівнюючи праві частини формул (1) і (3), отримаємо диференціальні рівняння
незбуреного руху ШСЗ у векторній формі: |
|
|
||
r |
|
r , |
(5) |
|
r 3 |
||||
|
|
|
||
де fM – гравітаційний параметр Землі. Диференціальні рівняння (5) в координатній формі мають вид
|
|
x |
|
d |
2 |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
||||||||
|
|
|
dt 2 |
r 3 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
d |
2 |
y |
|
|
|
|
|
|
|
||
|
|
y |
|
|
|
y , |
|
(6) |
||||||||
|
|
dt 2 |
|
r 3 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
z |
d |
2 |
z |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
z |
|
|
||||||||
|
|
|
|
|
|
|
r 3 |
|
|
|||||||
|
|
|
|
|
dt 2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де x , |
y |
|
|
|
|
|
|
|
|
|
супутника. Інтегруванням диференціальних |
|||||
і z – складові вектора прискорення r |
|
|||||||||||||||
рівнянь руху ШСЗ прогнозується його положення, |
вектор r (див. (4)), і складові x , |
y , |
z |
|||||||||||||
|
на інші моменти часу відносно початкового моменту t0. |
|
||||||||||||||||||||||
вектора швидкості r |
|
|||||||||||||||||||||||
Інтегрування диференціальних рівнянь руху. Інтегрування системи трьох рівнянь |
||||||||||||||||||||||||
другого порядку дає наступний загальний розв’язок: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
x x t, c1, c2 , c3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, c2 , c3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
y y t, c1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
, c3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
z |
z t, c1, c2 |
|
|
|
|
|
|
|
|
|
|
|
|
, |
(7) |
||||||||
|
x x t, c , c |
|
|
, c |
|
|
, c |
|
|
|
, c |
|
|
, c |
|
|
|
|
||||||
|
2 |
3 |
4 |
|
5 |
6 |
|
|
|
|||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
y y t, c , c |
|
, c |
|
|
, c |
|
|
, c |
|
|
, c |
|
|
|
|
|
|||||||
|
2 |
3 |
4 |
5 |
6 |
|
|
|||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
z z t, c , c |
2 |
, c |
3 |
, c |
4 |
, c |
5 |
, c |
6 |
|
|
|
|||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
де t – час, с1, с2, с3, с4, с5, с6 – довільні сталі, які визначаються початковими умовами руху. Ними є параметри орбіти ШСЗ x0 , y0 , z0 , x0 , y0 , z0 на початковий момент t0.
Інтегрування диференціальних рівнянь(5) або (6) виконують різними способами [ ].



|
y c z c |
3 |
x |
f |
2 |
, |
(23) |
||||
|
r |
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
z c |
2 |
x c y |
f |
3 |
. |
|
||||
|
r |
|
|
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Формулами (12), (18) і (23) записані сім перших інтегралів рівнянь незбуреного руху ШСЗ – три інтеграли площ, три інтеграли Лапласа та інтеграл енергії. Вони не можуть бути загальним розв’язком тому, що не містять явно час і не є незалежними.
Існує залежність між інтегралами площ і Лапласа, яка виражається наступним рівнянням:
f c 0 , |
(24) |
яке свідчить про ортогональність (перпендикулярність) цих двох векторів. Усі сім сталих зв’язує інше рівняння
|
|
|
f 2 2 |
hc2 , |
|
(25) |
|||
де |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f f 2 |
f 2 |
f 2 |
; |
c c2 |
c2 |
c2 . |
|||
1 |
2 |
3 |
|
1 |
2 |
3 |
|
||
Дослідження незбуреного руху. Якщо векторне рівняння інтегралу площ (10) скалярно
помножити на вектор r і здійснити перетворення, отримаємо вираз |
|
r c 0 , |
(26) |
яке виявляється рівнянням площини, що проходить через початок координат. В координатній формі воно має такий вид:
c1x c2 y c3 z 0 . |
(27) |
Рівняння (26) або (27) показує, що незбурений рух супутника відбувається у незмінній площині, яка визначається тільки початковими умовами задачі і, як наслідок, орбіта ШСЗ є плоскою кривою. Звідси, незбурений рух відбувається у площині, яка перпендикулярна (ортогональна) до вектора площ с. З математики відомо, що положення площини у просторі визначається перпендикулярним (ортогональним) до неї вектором. Таким чином, вектор площ с визначає орієнтацію площини орбіти супутника у просторі.
Тепер на вектор r помножимо скалярно вектор Лапласа (22), зробимо перетворення і отримаємо таке рівняння:
r c2 f r , |
(28) |
|
а у координатній формі воно має такий вид: |
|
|
r c2 |
f1x f2 y f3 z . |
(28 ) |
Рівняння (28) або (28 ) описує поверхню, на якій знаходиться супутник під час руху. Ця поверхня є поверхнею другого порядку, утвореною обертанням навколо осі, яка задана вектором f, один з фокусів якої співпадає з початком координат. Це може бути еліпсоїд, параболоїд або гіперболоїд обертання. Розв’язок системи складеної з рівнянь (27) і (28 )
c1x c2 y c3 z 0
(29)
r c 2 f1x f 2 y f3 z 0
геометрично є січення поверхні обертання площиною. В результаті січення виходить плоска крива другого порядку.
Згідно з першим законом Кеплера, незбурена орбіта супутника є плоскою кривою другого порядку, в одному з фокусів якої знаходиться центральне тіло (для штучних супутників Землі центральним тілом є Земля). В залежності від ексцентриситету орбіта супутника може приймати форму однієї з наступних плоских кривих другого порядку:
- кола, якщо ексцентриситет |
е = 0; |
|||
- еліпса, |
- « - |
0 |
< е < 1; |
|
- параболи |
- « - |
|
е = 1; |
|
- гіперболи |
- « - |
|
е > 1. |
|
Найчастіше орбіта ШСЗ є еліпсом. У цьому випадку форма, розміри, орієнтація орбіти |
||||
супутника визначається 6-ма параметрами (елементами орбіти ), а саме : |
||||
a |
- велика піввісь орбіти, |
|
|
|
e |
- ексцентриситет орбіти, |
|
||
Ω - довгота висхідного вузла орбіти, |
||||
i |
- кут нахилу орбіти, |
|
|
|
ω - аргумент перицентру, |
|
|
||
- момент проходження через перицентр.
|
|
|
|
|
|
A |
|
v |

 П
П
x J2000.0 |
|
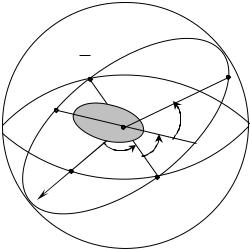
Рис. 1. Елементи орбіти.
Розміри і форма орбіти задаються великою піввіссю а та ексцентриситетом е орбіти. Орієнтація площини орбіти в просторі визначається довготою висхідного вузла орбіти Ω і кутом нахилу i.
Орбіта супутника перетинає небесний екватор у двох точках. Ці точки називаються вузлами:
-висхідний, в якому супутник перетинає екватор рухаючись з південної півкулі в північну;
-низхідний, в якому ШСЗ перетинає екватор рухаючись з північної півкулі в південну. Довгота висхідного вузла орбіти вимірюється від точки весняного рівнодення по екватору
від 0 до 360 , а кут нахилу і від площини екватора зі сходу на захід через точку півночі від 0
до 180 .
Аргумент перицентру (для ШСЗ - перигею) ω орієнтує велику вісь орбіти (лінію апсид, що з’єднує точки а п о г е ю і п е р и г е ю) в її площині, і вимірюється від точки висхідного вузла по орбіті від 0 до 360 . Апогей є найвіддаленішою точкою орбіти від Землі, а перигей – найближчою.
Положення супутника на орбіті визначається кутовим параметром v - істинною аномалією – кутом між напрямом на перигей і на положення супутника (див. рис. 1).
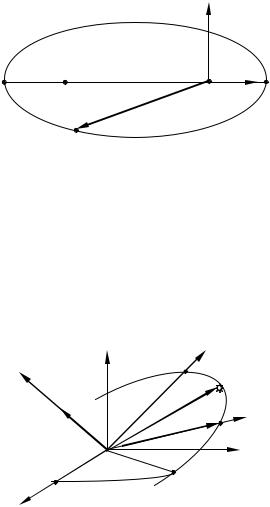
Пряма, що з’єднує фокуси, тобто лінія апсид, співпадає з напрямком вектора Лапласа, а вектор площ перпендикулярний до площини орбіти (рис. 2).
|
|
c |
|
|
A |
F2 |
F1 |
|
П |
|
|
f |
||
|
|
|
|
r
m
Рис. 2. Орбіта ШСЗ із взаємним розміщенням векторів r, c і f.
Рух супутника на орбіті визначається другим і третім законами Кеплера. У другому законі Кеплера зазначається, що за рівні проміжки часу радіус-вектор супутника описує площі рівних секторів. Інакше кажучи, що секторіальна швидкість супутника є стала. Це можна довести, якщо розглядати рух ШСЗ у системі координат O , жорстко скріпленій з площиною орбіти (рис. 3). Дві осі, О і O лежать у площині орбіти, тоді третя O – направлена перпендикулярно до площини орбіти по вектору інтеграла площ с. Вісь О направлена у точку перигею.
|
z |
|
|
|
|
|
|
|
|
|
|
c |
r |
|
|
|
f |
|
|
|
|
П |
|
|
|
|
|
|
O |
|
y |
|
|
N |
|
x |
|
|
|
Рис. 3. Зв’язок систем координат O і Oxyz.
У вибраній орбітальній системі координат (рис. 3) інтеграли площ отримаємо з виразу
i |
|
|
|
|
|
|
|
|
j |
k |
|
|
|||
|
|
|
|
|
|
|
|
r r |
|
|
0 |
|
i 0 j 0 k c , |
(30) |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|||
де i , j , k - орти відповідних осей орбітальної системи координат. Розкриваючи визначник і прирівнюючи вирази при однакових ортах, отримаємо
|
(31) |
c . |

Введемо полярну систему координат у площині орбіти через радіус-вектор r і кут v, і в цій системі координат виразимо інтеграл площ (31). Для цього знайдемо вирази для координат, і складових вектора швидкості , супутника у площині орбіти
r cosv , |
|
|
r cos v r sin v v , |
|
|
r sin v , |
r sin v r cosv v . |
(32) |
Тепер підставимо вирази (32) у формулу (31) для вектора площ і після перетворень отримаємо
r 2 v c . |
(33) |
||||||||
Нехай положення супутника за невеликий проміжок часу t зміниться на кут |
v. Тоді |
||||||||
площа, яку опише радіус-вектор супутника, буде площею сектора |
|
||||||||
|
|
|
r 2 |
|
|||||
s |
|
|
|
v . |
|
||||
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
||
Похідну від площі по часу t називають секторіальною швидкістю, яка запишеться так |
|||||||||
s |
ds |
|
|
1 |
r 2v . |
(34) |
|||
|
|
|
|||||||
|
dt |
2 |
|
|
|||||
Порівнюючи формули (33) і (34), маємо |
|
|
|
|
|
|
|
||
|
s |
c |
, |
(35) |
|||||
|
|
||||||||
|
|
|
2 |
|
|
|
|||
що виражає другий закон Кеплера.
Рівняння орбіти в полярних координатах. Розв’язок системи рівнянь (29) є рівнянням орбіти. В орбітальній системі координат система (29) перетворюється у таку:
0 |
|
|
r c 2 |
. |
(36) |
f 0 |
|
|
|
|
|
В полярних координатах друге рівняння системи (36) після |
підстановки r cosv |
||||||
прийме вид |
|
|
|
|
|
||
|
|
c2 |
|
|
|
||
r |
|
|
|
|
. |
|
|
1 f |
cos v |
|
|
||||
Якщо позначити |
|
|
|
|
|
||
c2 p ; |
f e |
, |
(37) |
||||
отримаємо рівняння кривої другого порядку у полярних координатах |
|
||||||
r |
|
p |
|
|
|||
|
, |
|
(38) |
||||
1 e cos v |
|
||||||
де p – параметр кривої, е – ексцентриситет. Параметр |
орбіти |
(для еліптичного руху – |
|||||
фокальний параметр) можна виразити через велику піввісь орбіти |
|
||||||
p a 1 e2 . |
|
(39) |
|||||
В залежності від ексцентриситету е плоска крива другого порядку може приймати різну форму і значення інтегралів c, f i h при цьому також змінюються. Дослідимо, які значення

приймає інтеграл енергії V 2 2  r h при різних ексцентриситетах е. Для цього використаємо рівняння зв’язку перших семи інтегралів (25), в якому враховуючи позначення (37), отримаємо
r h при різних ексцентриситетах е. Для цього використаємо рівняння зв’язку перших семи інтегралів (25), в якому враховуючи позначення (37), отримаємо
e2 1 h c 2 . |
(40) |
В еліптичному русі 0 e 1, тоді на основі (40) h 0 , і з інтегралу енергії виходить, що
V 2 2  r .
r .
Це означає, що кінетична енергія руху супутника менша за його потенціальну енергію. Для окремого випадку, коли e 0 , із (40) маємо
h |
. |
(41) |
|||||
|
|
|
p |
|
|||
При коловому русі радіус орбіти r p a . Враховуючи це і підставляючи (41) в інтеграл |
|||||||
енергії, отримаємо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
. |
(42) |
|||
|
|
|
r |
|
|||
Якщо приймемо, що Земля сферичної форми з радіусом 6371,1 км і = 398600,5 км3/с2, |
|||||||
то V = 7,91 км/с. |
|
|
|
|
|
|
|
При параболічному русі e 1, тому h 0 |
і, відповідно |
|
|||||
|
|
|
|
|
|
||
V |
|
2 |
. |
(43) |
|||
|
|
||||||
|
|
|
r |
|
|||
Таким чином, при параболічному русі кінетична і потенціальна енергії супутника однакові. Для Землі це відбудеться при швидкості супутника то V = 11,2 км/с.
В теорії руху ШСЗ прийнято колову швидкість супутника називати першою космічною швидкістю, а параболічну – другою космічною швидкістю.
При гіперболічному русі e 1 і h 0 , тому
V 2 2 r . |
(44) |
В цьому випадку визначальну роль відіграє кінетична енергія супутника, вона більша від потенціальної енергії.
Динамічний інтеграл. Всі, отримані вище, інтеграли (12), (18) і (23) не можуть бути загальним розв’язком системи диференціальних рівнянь незбуреного руху (6), тому що не містять час у явному виді. Інтеграл, який дає в явному виді залежність положення ШСЗ на орбіті від часу t отримаємо інтегруванням виразу для інтеграла площ (33), підставляючи туди рівняння орбітальної кривої (38), маємо
v |
dv |
|
|
|
|
|
|
|
|
|
|
|
t . |
(45) |
|||
|
|
|
||||||
1 e cos v |
2 |
3 |
||||||
0 |
|
|
|
p |
|
|||
Інтеграл в лівій частині виразу (45) залежить від того, яке значення приймає ексцентриситет орбіти е.

Оскільки ШСЗ, як правило, має еліптичну орбіту 0 e 1, тому розглянемо тільки цей випадок. Для обчислення інтеграла (45) вводять нову змінну на основі тангенса половинного кута за формулою
tg |
v |
|
1 e |
|
|
|
tg |
E |
. |
(46) |
||||
|
|
|
|
|
|
|||||||||
2 |
|
1 e |
2 |
|
|
|||||||||
Після диференціювання (46), підстановки у (45) і інтегрування отримаємо |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
E e sin E |
|
|
|
|
t . |
(47) |
||||||||
a3 |
||||||||||||||
Введемо середній рух n і середню аномалію M за формулами |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
n |
|
|
|
|
, |
|
|
|
|
(48) |
||
|
|
|
a3 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M n t . |
(49) |
|||||||||||||
Рівняння (47) із врахуванням (48) і (49) прийме вид: |
|
|||||||||||||
E e sin E M . |
(50) |
|||||||||||||
Це рівняння називається рівнянням Кеплера. Воно зв’язує допоміжну змінну, якою є ексцентрична аномалія Е, середню аномалію М, момент проходження супутника через перигейі час t.
Згідно з формулою (49) середня аномалія М зростає прямо пропорціонально часові і визначає положення деякого фіктивного супутника, який рухається рівномірно по колу радіуса великої півосі а з періодом T, що дорівнює реальному. Реальний супутник рухається по еліпсу і відповідно з другим законом Кеплера має максимальну швидкість в перигеї і мінімальну в
апогеї. |
|
|
|
|
|
|
Нехай супутник має період обертання Т. |
Тоді з рівнянь (49) і (50) виходить , що при |
|||||
повному оберті ШСЗ отримаємо 360 nT , звідси |
|
|
|
|||
n |
360 |
|
2 |
. |
(51) |
|
T |
T |
|||||
|
|
|
|
|||
Таким чином, n – середня кутова швидкість рухомої точки. В небесній механіці її називають середнім рухом.
Підставимо у формулу (51) замість n вираз (48) і після перетворень отримаємо
T 2 |
|
4 |
2 |
const |
, |
(52) |
a3 |
|
|
||||
|
|
|
|
|
Ця формула відображає третій закон Кеплера, згідно з яким в еліптичному незбуреному русі відношення квадрата періоду Т обертання супутника по орбіті до куба її великої півосі а є величина стала для даної планети.
Рух ШСЗ за законами Кеплера є найпростішою моделлю орбітального руху супутника і називається кеплерівським або незбуреним рухом. Необхідною умовою виконання законів Кеплера є припущення, що Земля (центральне тіло) і супутник - це матеріальні точки з масами

рівними масам Землі і супутника відповідно. У цьому випадку супутник рухається під дією тільки двох сил - гравітаційного притягання Землі та прискорення супутника.
Зміст роботи
Згідно в зазначеним вище, за модель Землі приймаємо кулю з середнім радіусом R = 6371.1 км і геоцентричною гравітаційною сталою = 398600.5 км3/с2. Ці параметри є вихідними для розв’язування задач.
Задача 1. Побудувати схематично еліптичну орбіту та її проєкцію на небесну сферу за такими параметрами:
-довготою висхідного, вузла орбіти ;
-кутом нахилу орбіти і;
-аргументом перицентру
та показати положення супутника на орбіті коли, відома його істинна аномалія v.
Результатом цієї задачі є схематично побудований рисунок, на якому за даними свого варіанту (параметрами орбіти , і, і v) нанесені параметри орбіти подібно до рис. 1.
Задача 2. Для ШСЗ на коловій орбіті обчислити три з наступних чотирьох величин: радіус орбіти r, період T, лінійну швидкість супутника V, висоту орбіти H, якщо одна з цих величин відома. Виконати обчислення для таких трьох випадків:
а) відома висота орбіти H; б) заданий середній рух n;
в) відомий період орбіти T для випадку, коли ШСЗ має геоcтацioнарну орбіту.
Формули для розв’язку задачі.
Випадок а). Якщо відома висота орбіти H, то можна обчислити радіус колової орбіти r, оскільки відомий радіус R сферичної моделі Землі
r R H . |
(53) |
За відомим радіусом орбіти отримаємо лінійну швидкість супутника за формулою (42)
V 
 r .
r .
Тут досліджуємо колову орбіту, тобто e 0 , значить велика піввісь а дорівнює радіусу орбіти r, а саме: a r . При такій умові застосуємо третій закон Кеплера
T 2 |
|
4 |
2 |
. |
a 3 |
|
|
||
|
|
|
Звідси обчислимо період обертання супутника Т
T 2 |
a 3 |
. |
(54) |
|
|
||||
|
|
|
За результатами обчислень необхідно зробити рисунок, на якому показати: Землю у вигляді сфери і колову орбіту ШСЗ. За одиницю масштабу прийняти радіус Землі R. Одиниця