

Усе
.pdfБагатошляховість поширення сигналу з'являється в результаті відбиття сигналу супутника від відбиваючих поверхонь (стіни будинків, огорожі, водні поверхні),
розташованих безпосередньо біля приймача. При цьому виникає явище інтерференції, яке приводить до видовження псевдовіддалі. Похибки викликані багатошляховістю поширення сигналу поділяють на три групи:
- дифузне пряме розсіювання (проходження сигналу повз хаотично розташовані предмети), яке спричиняє похибки псевдовідстаней до 10 м;
-дзеркальне відбиття від близько розташованих від антени поверхонь, що дає похибки визначення псевдовідстаней до 6 м;
-флуктуації дуже низької частоти, звичайно пов’язані з відбивання від поверхні води, що спричиняє похибки визначення псевдовідстаней до 10 м.
У настановах із проведення GPS вимірів для усунення додаткового відбиття сигналів рекомендують антену приймача розташовувати у місцях із відсутніми відбиваючими поверхнями. Для фільтрування GPS-сигналів відбитих від водних і підстилаючих поверхонь, нижню частину антени оснащують спеціальними кільцями, які перешкоджають проходженню цих сигналів. У результаті впливу цього фактора помилка визначення псевдовідстані може збільшитися на 2 м.
При диференційних вимірах величина похибки за багатошляховість поширення сигналів не перевищує 1 см, за умови достатньо тривалого інтервалу спостережень та якісної конфігурації сузір'я супутників.
Релятивістські та гравітаційні ефекти теорії відносності впливають на відносний хід часу і розподілом електромагнітних сигналів. До них відносяться ефекти:
-доплера другого порядку, який полягає у впливі відносної швидкості руху двох об’єктів, які є носіями годинників на величину частотного зсуву генерованих ними сигналів. Зростання швидкості руху годинника у інерціальній системі координат приводить до сповільнення фіксованого ним часу, що вимагає корекції частотного зсуву і синхронізації годинників супутника та приймача.
-гравітаційний зсув частоти, який полягає у впливі різниці гравітаційних потенціалів у місцях розташування носіїв годинників (супутника та приймача) на
величину відносного частотного зсуву генерованих сигналів. Збільшення потенціалу гравітаційного поля приводить до сповільнення фіксованого годинником часу, що також вимагає корекції частотного зсуву і синхронізації годинників супутника та приймача.
-обертання використовуваних систем відліку, який полягає у їх впливі на математичну інтерпретацію в рамках загальної теорії відносності результатів частотного зсуву та часової затримки електромагнітних сигналів.
-малого порядку впливу, який полягає у затримці електромагнітних сигналів у гравітаційному полі та інші. Вони також приводять до зсуву частоти прийнятих сигналів.
Максимальна похибка визначення псевдовіддалей обумовлених релятивістськими та гравітаційними ефектами не перевищує 19 мм. При відносних вимірах ця похибка зменшується до порядку 10 9 . Зсув фундаментальної частоти генерованої годинником на супутнику є приблизно однаковий 4,55 10 3 Гц.
Відносний зсув частоти годинника приймача є порядку 10 нс. Ці величини є незрівнянно менші від впливу на точність вимірів інших факторів, наприклад тропосферних затримок. Однак врахування цих ефектів виконується програмними засобами опрацювання GPSвимірів.
Інструментальна похибка приймача обумовлена наявністю шумів в електронному тракті приймача. Відношення сигнал/шум приймача визначає точність процедури порівняння опорного і прийнятого від ШСЗ сигналів, тобто похибку обчислення псевдовіддалі. Наявність даної помилки може приводити у абсолютному методі до виникнення координатної похибки у межах 1,2 м.
Зсув та варіації фазового центру антени GPS приймача приводять до похибок визначення псевдовіддалей у межах 1 см. Фазовим центром антени є точка, від якої відраховується псевдовіддаль до центра антени супутника. Розрізняють, зміщення фазового центру (ексцентриситет) та його варіації відносно осі обертання антени та відлікової точки ARP. Крім цього існує два фазові центри, які відносяться до частот
L1 і L2. Вони відповідно мають різні ексцентриситети. Ексцентриситет фазового центру може бути викликаний неточним юстування комплектуючих антени, або
непаралельністю осі круглого рівня осі обертання антени. Ексцентриситет фазового центру, є як правило постійною величиною. Причиною зміни його параметрів можуть бути порушення умов експлуатації приймача (сильне струшування) або ремонт антени. Варіації положення фазового центру залежать від геометрії сузір’я
видимих супутників та їх висоти над горизонтом.
Лекція. Структура супутникового сигналу
Всі супутники GPS випромінюють навігаційні сигнали на двох високостабільних несучих частотах: L1=1575.42 МГц і L2=1227.60 МГц, отриманих множенням фундаментальної частоти генератора бортового атомного годинника f 0
=10.23 МГц. На несучі хвилі L1 та L2 за допомогою фазової модуляції накладаються дві закодовані послідовності двійкових імпульсів (0; 1) - “код P” (precise - точний або protected - захищений) і “код C/A” (coarse/acquisition - грубий/доступний або clear acquisition - вільно або загально доступний),- та, так зване, навігаційне повідомлення, або “код D” (data, navigation data - навігаційні дані). Коди P та C/A
призначені для вимірювання часу проходження навігаційним сигналом відстаней
“супутник-пункт”, що дає можливість, якщо годинники на борту супутника і в пункті спостереження синхронізовані між собою визначити самі відстані: r ' c ,
де c = 299792458 м c-1 – швидкість електромагнітних хвиль у вакуумі. Код P
накладається на обидві несучі, на L1 і на L2, він дозволяє вимірювати вказані відстані з точністю 0.3 - 0.5 м (теоретично, не враховуючи похибок спостережень) і
є доступним тільки обмеженому колу користувачів. З метою запобігання небажаному проникненню в систему GPS і навмисному спотворенню ії сигналів, цей код з 1994 р. заміняється на аналогічний, але більш засекречений код Y. Код C/A
накладається тільки на несучу хвилю L1, є загально доступним, але дає відстані з гіршою точністю, теоретично 3-5 м. Код C/A має ще одне призначення – він використовується для початкового захоплення навігаційного сигнала при спостереженнях. Код D накладається на обидві несучі і містить наступну інформацію: елементи орбіти власного космічного апарата, за якими можна обчислити його геоцентричні координати на моменти трансляції сигналів з точністю
0.5-2 м; моменти трансляції сигналів за бортовим годинником і поправки цього годинника відносно шкали часу GPS; параметри точності трансльованих сигналів;
параметри моделі будови і стану іоносфери; параметри загального стану (цілісності)
всієї системи GPS на біжучий період; елементи орбіт всіх інших космічних апаратів
(альманах) з нижчою точністю, достатньою для обчислення їх ефемерид при організації спостережень та деякі інші дані.
Окремі компоненти сигналу показані в таблиці 2.1. Тут слід відзначити, що номінальна частота приблизно на 0.005 Гц менша зазначеної величини, чим компенсуються релятивістські ефекти.
Таблиця 1
Компоненти сигналу
Назва хвилі |
|
Частота (МГц) |
|
|
|
Основна частота |
f0 |
= 10.23 |
Несуча хвиля L1 |
154 f0 |
= 1575.42 ( 19 см) |
Несуча хвиля L2 |
120 f0 |
= 1227.60 ( 24.4 см) |
Р – код |
f0 |
= 10.23 |
С\А – код |
f0/10 |
= 1.023 |
|
||
D – код |
f0/201600 = 50*10-6 = 50 Гц |
|
|
|
|
Лекція. Типи ефемерид GPS-супутників та їх точність
Слід розрізняти два види ефемерид:
Broadcast - ефемериди, тобто передані сигналом супутника;
уточнені ефемериди.
Broadcast – ефемериди представляють собою екстрапольовані (прогнозовані)
значення параметрів орбіт супутників. Вони модулюються в блоці даних із супутниковим сигналом після чого представляються в розпорядження користувача вже під час спостережень. Вони дозволяють визначити місцезнаходження пункту в реальному часі, правда, з більш низькою точністю в порівнянні з точними ефемеридами. У вище згаданому блоці даних разом з ефемеридами для конкретного супутника передаються ще коректуючі параметри для бортового годинника і іоносфери, а також скорочена (за точністю) інформація про орбіти, решти супутників системи (альманах).
Необхідно підкреслити, що OCS, хоча і задовільняє потреби навігації і вимоги щодо точності розв’язку багатьох задач геодезичної практики, однак, в таких роботах, як, наприклад, створення фундаментальних опорних геодезичних мереж,
геодинамічні дослідження і т.п., бажано отримувати результати з вищою,
максимально можливою точністю. В методі GPS цього можна досягти, але вже в неоперативному (або в пост-оперативному) режимі, шляхом використання, замість прогнозованих – “бортових ефемерид”, “уточнених ефемерид” – тобто координат космічних апаратів, визначених за результатами спостережень моніторінгових станцій і проінтерпольованих безпосередньо на моменти GPS-спостережень в геодезичних пунктах. Так, Військове картографічне управління США створило додатково шість перманентних GPS-станцій, рознесених по планеті, результати спостережень яких використовує в комбінації з даними станцій OCS для обчислення уточнених ефемерид. В зв‘язку з тим, що ці уточнені ефемериди доступні тільки військовим користувачам, цілий ряд цивільних організацій створили власні мережі перманентних GPS-станцій і центрів для обчислення таких ефемерид і забезпечення ними своїх користувачів. Наприклад, CIGNET (Cooperative International GPS Network), IGS (International GPS service for Geodynamics), CODE (Centre of Orbit
Determination for Europe). Зрозуміло, що ці установи не мають доступу до контролю
і керування самою системою GPS.
Лекція. ГЛОБАЛЬНІ НАВІГАЦІЙНІ СУПУТНИКОВІ СИСТЕМИ (GNSS)
ЕЛЕМЕНТИ БУДОВИ СИСТЕМИ GPS ТА ЇЇ ФУНКЦІОНУВАННЯ
На даний час розгортаються і вже є повністю сформованими кілька глобальних навігаційних супутникових систем (GNSS) це – GPS (США), ГЛОНАСС
(Росія), Galileo (Європейський Союз), BeiDou (Китай). Зараз застосовуються, як правило, перші дві системи. Кожна з цих навігаційних систем має свої особливості,
але в загальному їх будова подібна, тому розглянемо її на прикладі системи GPS.
1 Призначення та функціонування системи GPS
NAVSTAR GPS (Navigation Satellite Timing and Ranging Global Positioning System – навігаційна супутникова глобальна позиційна система за вимірюванням часу та відстані) є оперативною загальноземною навігаційною радіовіддалемірною супутниковою системою. Система GPS дає можливість визначати просторові координати та час у будь-якій точці земної поверхні чи навколоземного простору,
де на період цих позиційніх визначень розміщується спеціальна антена приймача
GPS-сигналів. Координати точки визначаються за допомогою відстаней між антеною приймача і відомими миттєвими положеннями кількох супутників GPS.
Самі ж ці відстані обчислюються через безпосередньо виміряні величини, якими можуть бути або інтервали часу (кодові виміри), необхідні на подолання навігаційними сигналами відстаней від антен відповідних космічних апаратів до антени приймача, або набуті на цьому шляху різниці фаз несучих хвиль (фазові виміри), що несуть ці електромагнітні сигнали. Радіотехнічні спостереження супутників GPS можуть виконуватися в будь-який час доби, незалежно від метеорологічних умов. Вони вимагають тільки достатньої видимості неба. Самі
GPS-спостереження та їх математична обробка максимально автоматизовані.
На сучасному етапі GPS призначена забезпечувати розв’язання, крім навігаційних, також і наступних геодезичних задач:
абсолютні визначення просторових координат пунктів в єдиній геоцентричній системі з точністю 15 – 40 м в оперативному, і 3 – 5 м або 0.5 – 1 м в постоперативному режимі в залежності від точності ефемерид;
визначення приростів координат між пунктами, або векторів довжиною до ~200
– 400 км з відносною похибкою 1 10-6 – 1 10-7, на основі навігаційних ефемерид,
і 1 10-8 – 1 10-9 на основі уточнених ефемерид;
прив’язка годинників до шкали часу UTC з точністю до 1 мкс.
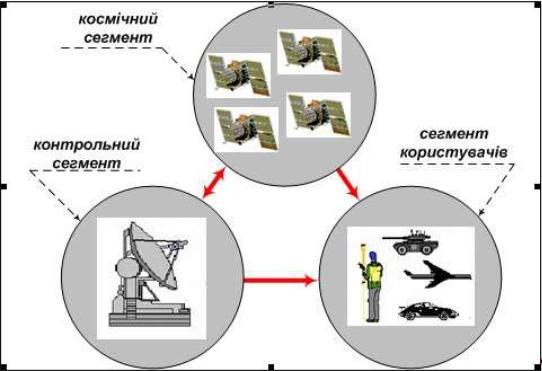
2 Будова системи GPS
GPS складається з трьох сегментів: космічного, контрольного і користувачів (рис. 1).
Рис. 1. Складові частини (сегменти) системи GPS
Перші GPS-супутники експериментальної серії Block I були виведені на свої орбіти у 1978 р. У 1989 р. розпочато запуски космічних апаратів основної серії Block II. Повна комплектація сузір’я супутників GPS космічними апаратами основної серії завершена в 1994 р. На даний момент воно складається з апаратів серій Block IIA, IIR, ІІF і III. Запланований термін функціонування супутників – 7.5–10 років. Їх маса
~1.5–2 т. Джерелом енергії служать сонячні батареї і акумулятори. Космічні апарати обладнані системами стабілізації та орієнтації, рубідієвими і цезієвими атомними годинниками або водневими мазерами, процесорами, комплексом радіоелектронної апаратури для прийому інформації від контрольного сегменту та для формування і

трансляції навігаційних сигналів, та інш. Ефемериди супутників оновлюються 3
рази на добу. Супутники з серії Block IIR мають бортову систему автономного визначення своїх орбіт, прогнозування ефемерид і генерування власних навігаційних повідомлень.
Космічний сегмент запроектований з 24 ШСЗ (рис. 2), які розміщені в шістьох орбітальних площинах, нахилених під кутом 55° до екватора, групами по чотири супутники, так, щоб у будь-який момент часу над горизонтом будь-якої точки поверхні Землі знаходилося не менше чотирьох космічних апаратів.
Практично, в наших широтах можуть одночасно спостерігатися 4-9 супутників GPS.
Їх близькі до кругових орбіти (e < 0.02) мають висоту ~20180 км, що відповідає періоду обертання 0.5 зоряної доби.
Рис. 2 Космічний сегмент системи GPS
Контрольний сегмент (рис. 3) – це комплекс наземних засобів, за допомогою якого забезпечується функціонування системи, контролюється її робота, та здійснюється безпосереднє керування. Основу цього сегменту складає, так звана,
система оперативного контролю OCS (Operational Control System) МО США, що включає в себе шість станцій неперервного моніторінгу, супутників, головну і три додаткові станції управління. Моніторінгові станції розташовані в різних точках