

8.4. Способи врівноважування опорних гравіметричних мереж
Після
виконання спостережень на пунктах
польової опорної гравіметричної мережі
з урахуванням поправок за зміщення
нуль-пункту і температури виникає задача
врівноважування вимірювань Але практично
всі спостереження обтяжені похибками
вимірювань, внаслідок чого сума виміряних
значень приростів сили ваги для зімкненого
полігона не буде дорівнювати нулю, а
деякій величині, яку називають нев’язкою
полігона Під задачею врівноважування
опорної гравіметричної мережі розуміють
обчислення наймовірних поправок до
спостережуваних значень приросту сили
ваги, після введення яких будуть
задовольнятися геометричні умови.
Допустиму нев’язку ( доп.
обчислюють за формулою:
доп.
обчислюють за формулою:
 (8.33)
(8.33)
де;
тon-середня квадратична похибка одного спостереження на пунктах опорної мережі.
k-кількість сторін полігона,
т-середня кількість незалежних визначень приросту сили ваги між двома сусідніми опорними пунктами для даного полігона.
Тоді нев’язка полігона повинна дорівнювати або бути меншою допустимою
значення
нев'язки .Існують
різні способи врівноважування опорних
мереж, але найбільше застосування у
практиці гравіметричних робіт одержали
спосіб полігонів (корелат) і спосіб
вузлів. Спочатку пояснимо суть
врівноважування опорних гравіметричних
мереж способом полігонів або способом
корелат. Для цього розглянемо опорну
гравіметричну мережу, яка складається
із чотирьох полігонів
.Існують
різні способи врівноважування опорних
мереж, але найбільше застосування у
практиці гравіметричних робіт одержали
спосіб полігонів (корелат) і спосіб
вузлів. Спочатку пояснимо суть
врівноважування опорних гравіметричних
мереж способом полігонів або способом
корелат. Для цього розглянемо опорну
гравіметричну мережу, яка складається
із чотирьох полігонів
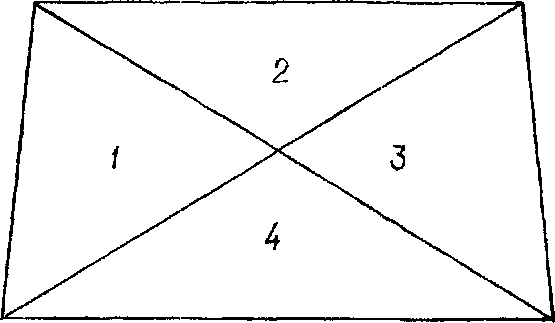
Рис. 37. Схема опорної гравіметричної мережі.
Сторони полігонів, для яких виміряні прирости сили ваги, називають ланками полігонів. Точність приросту сили ваги окремих ланок полігонів оцінюють вагою, за яку
приймають кількість вимірів приростів сили вагиΔg даної ланки полігона або кількість приладів для вимірювання даної різниціΔg та ін. Приймемо, що - нев’язка полігона, Р - вага ланки з відповідними індексами для конкретних полігонів (Р1,P2, Рз, Р4) або
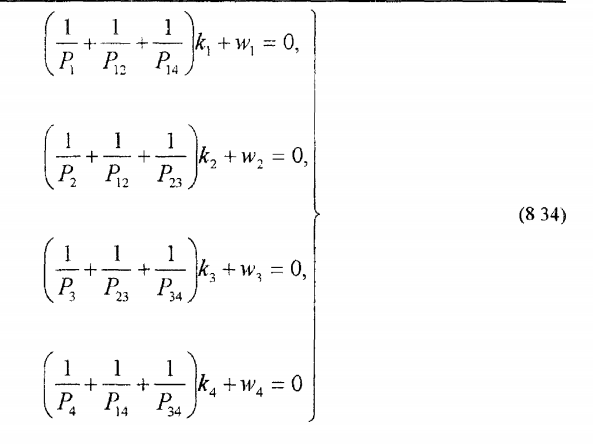
одночасно для двох суміжних полігонів (Р12, Р23, Р34, Р41). Тоді нормальні рівняння корелат для ізольованих окремих полігонів записують у вигляді:


 (8.35)
(8.35)
 Уцих
формулахk1,k2,к3
і k4
- корелати, або поправки на одиницю ваги
відповідного
полігона
Уцих
формулахk1,k2,к3
і k4
- корелати, або поправки на одиницю ваги
відповідного
полігона
Але оскільки k1≠k2≠k3≠k4, то треба взяти до ваги умову суміжності сторін (ланок) при поділі нев'язки в полігоні .У загальні ланки вводять поправки, які б задовольнили рівняння суміжних полігонів. З урахуванням цього для обчислення поправок до ланок одержимо такiнормальні рівняння.
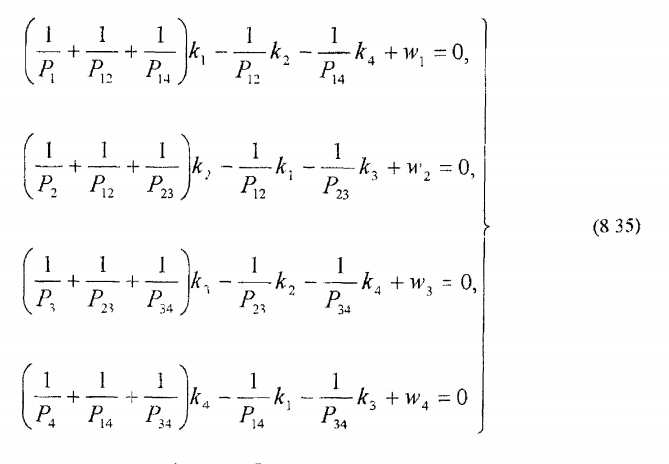



 (8.36)
(8.36)
Кiлькiстьнормальних рiвнянь буде дорiвнювати кiлькостi полiгонiв .Розв’язуючи систему нормальних рiвнянь одержуємо для кожного полігона одне
значення корелати к Для ланок, які належать тільки одному полігону, одержимо поправкиδ:

 (8.36)
(8.36)


Якщо ланки належать двом суміжним полігонам, тоді поправку в ланку визначають як добуток різниць відповідних корелат на обернену величину її ваги


 (8.37)
(8.37)

Контролем правильності обчислення поправок для кожного полігона є формула:
 (8.38)
(8.38)
Ці поправки δ використовують для оцінки точності. Середню квадратичну похибку одиниці ваги μ визначають за формулою
 (8.39)
(8.39)
а похибку тΔgвизначення різниці сили ваги вздовж сторони полігона знаходять
 (8.40)
(8.40)
В цих формулахn-кількість полігонів
При великій кількості полігонів розв’язати систем нормальних рівнянь корелат є задачею непростою, і через те застосовують спосіб послідовних наближень з використанням ЕОМ
Якщо опорна польова гравіметрична мережа включає декілька пунктів з вихідними значеннями сили ваги, то тоді п вигідніше врівноважити способом вузлів Розглянемо суть цього способу на прикладі пунктів опорної гравіметричної мережі, дія якої перетинаються гравіметрові рейси (див рис 38)
1
Н
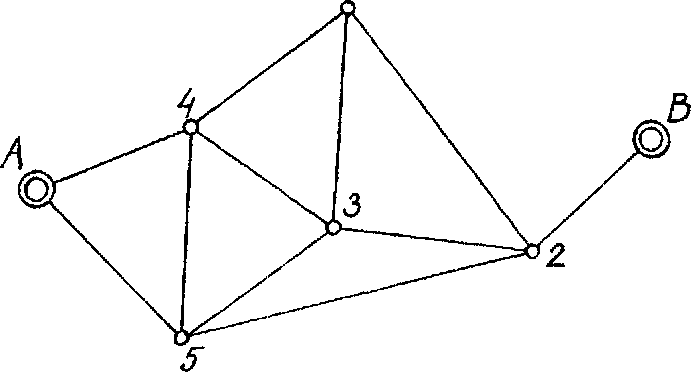
Рис. 38. Вузлова мережа.
а рис 38 пункти А і В вищого класу, значений сили ваги яких не повинні змінюватися Введемо позначення Δg12/,Δg23,Δg34 - виміряні значення приростів силиваги, Р12,P23,P34- ваги, які відповідають цим приростам сили ваги Значення сили ваги на кожний опорний пункт можна передати від вихідного через будь-який сусідній опорний пункт, з яким даний пункт має зв’язок Для пункту 1 можна одержати три різних наближених значень сили ваги Найiмовірніше значення сили ваги g1в цьому
пункті буде дорівнювати середньоваговому із усіх значеньgi переданих із сусідніх пунктів
 (8.41)
(8.41)
Аналогічні рівняння можна записати і для всіх інших вузлових пунктів, Кількість таких рівнянь буде дорівнювати кількості вузлових пунктів. Розв’язую ш цю систему рівнянь, одержуємо врівноважені значення сили ваги в вузлах опорної мережі. Значно простіше і швидше розв’язують щ нормальні рівняння, якщо замість врівноважених взяти наближені значення сили ваги, а саме:
 (8.42)
(8.42)
де;
g1, - наближене значення сили ваги на опорному пункті,
х1, - поправка до наближеного значення сили ваги на цьому пункті.
Далі розв’язують систему нормальних рівнянь і визначають невідомі поправки х, до наближених значень сили ваги в опорних вузлових пунктах. У випадках, коли кількість невідомих і зв’язків є дуже велика, то тоді застосовують ітераційний спосіб послідовних наближень при розв’язанні систем нормальних рівнянь.