

Geodeziya_kl
.pdf; |
Пряма однократна засічка – метод Гаусса |
Задача передбачає визначення координат пункту спостереженням його з двох пунктів з відомими координатами, між якими не має взаємної видимості. Відомі: (xА, yА), (xБ, yБ)
Визначені в ході вимірювань: αА, βА, αБ, βБ , Відомі: (xА, yА), (xБ, yБ) Визначені в ході вимірювань: αА, βА, αБ, βБ, Знайти: (xР, yР)
Схема прямої засічки - метод Гаусса
Позначимо напрямки на з пунктів А та Б на пункт Р, як АР та БР:
Складаємо рівняння для координати у Віднімаючи з першого рівняння друге маємо пункту Р: формули для визначення координат пункту,
що спостерігається з точок А та Б:

; ; Обернена кутова засічка
.
.
Задача передбачає визначення координат точки, з якої здійснюються спостереження трьох пунктів з відомими координатами, в ході спостережень вимірюються кути між напрямками
з точки стояння на пункти, що спостерігаються. Відомі: (xА , yА), (xБ , yБ), (xС , yС) |
|
Виміряні :βАБ, βБС Знайти: (xР , yР). Рішення задачі |
. |
|
|
за формулами Праніс-Праневіча.1. |
|
|
2. Контроль |
|
різності координат |
Схема оберної |
|
кутової засічки |
3.Розрахунок приросту координат |
|
точки Р відносно точки Б: |
4.Визначення координат точки Р:
http://sitegeodesy.com/4.html

ПЛАНОВА ГЕОДЕЗИЧНА МЕРЕЖА
Планова геодезична мережа включає державну геодезичну мережу, геодезичну мережу згущення і знімальну мережу, які різняться за характером та послідовністю розвинення, точністю і призначенням. Найбільш точною і загальною є державна геодезична сітка, яку поділяють на чотири класи. Класи встановлюють за точністю вимірювання кутів і відстаней, довжиною сторін та порядком послідовного розвитку сітки. Державну геодезичну сітку створюють методами тріангуляції, полігонометрії та трилатерації.
Тріангуляцією називають побудовані на місцевості системи трикутників (рис.), що примикають один до одного.

Типові тріангуляційні побудови
Типовими тріангуляційними побудовами є суцільна мережа, центральна система (а), геодезичний чотирикутник (б), ланцюг трикутників (в), віялоподібна мережа (г), а також їх сполучення, наприклад, центральної системи з геодезичним чотирикутником (д). (На рисунках базисні сторони показані подвійними лініями).
Для того, щоб визначити координати всіх пунктів мережі, потрібно мати координати хоча б одного вихідного пункту (наприклад, А, довжину однієї сторони АВ і дирекційний кут цієї сторони, а також всі внутрішні кути трикутника. За теоремою синусів
a/sinA=b/sinB=c/sinC
обчислюють довжини інших сторін трикутника, а потім координати пункту С (координати пункту В, як вихідного, можуть бути також відомі). Довжини та дирекційні кути всіх пунктів знаходять послідовним рішенням всіх трикутників мережі. Координати вихідних пунктів отримують або за астрономічними спостереженнями, або вибирають з мереж вищого класу.

Полігонометрія
Полігонометрія — метод побудови на місцевості планової геодезичної мережі шляхом прокладання ходів, в яких вимірюються горизонтальні кути і віддалі між пунктами ходів, закріплених для довгострокового зберігання і координати котрих визначені у єдиній системі.
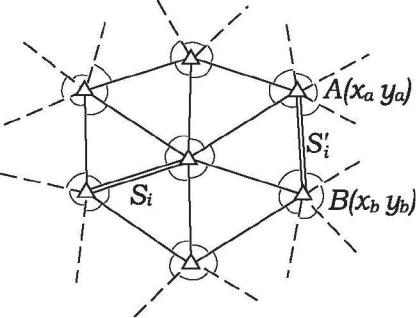
Хід полігонометрії, як послідовність виміряних ліній, тобто сторін ходу (на рис. 9.1 вони позначені S1,...,Sn) частіше розімкнутий. Виміряні кути поділяють на кути повороту ходу βі′ та примикаючі (прилеглі) βі′. Пункти, в яких сходяться не менше трьох ходів називають вузловими пунктами. Відрізки ходів між вузловими пунктами або між вузловими та вихідними називають ланками полігонометрії. Хід за формою може бути витягнутим, зігненим або довільним. За виміряними сторонами і кутами ходу, а також за відомими координатами вихідного пункту А та дирекційним кутом сторони АС, обчислюють координати всіх вершин ходу.
Трилатерація
Трилатерація — метод побудови на місцевості планової геодезичної мережі у вигляді системи трикутників, що примикають один до одного, вершинами яких є закріплені для довгострокового зберігання пункти, положення котрих визначено у загальній системі координат.
В трикутниках (на відміну від тріангуляції) виміряні всі довжини сторін.
Форми мереж подібні до тріангуляційних побудов з обов’язковою опорою на сполучені вихідні пункти. Вершини трикутників є пунктами трилатерації. Координати пунктів трилатерації обчислюють у два етапи: спочатку за теоремою синусів отримують значення всіх кутів трикутників, а потім розв’язанням прямої геодезичної задачі знаходять і координати .
Вибір методу побудови сітки визначають за економічною! технічною доцільністю. Державну геодезичну сітку першого та другого класів створюють методами тріангуляції та полігонометрії і використовують у наукових дослідженнях, пов'язаних з визначенням форми й розмірів Землі як планети, для поширення єдиної системи координат на всю територію країни. Вона є основою для розвитку сіток наступних класів.
Тріангуляційна сітка першого класу має вигляд системи полігонів периметром 800^—1000 км. Полігони складаються з ланок-ланцюжків трикутників довжиною до 200 км уздовж меридіанів і паралелей. Форма трикутників повинна бути близькою до рівносторонньої з довжиною сторін не менш як 20 км. Трикутники другого класу (вершини їх на рис. 7.8 позначені кружками) заповнюють суцільною сіткою полігони першого класу. Довжина сторін трикутників другого класу 7— 20 км. Державні геодезичні сітки третього і четвертого класів розташовують усередині трикутників другого класу.
Геодезичні сітки згущення будують при недостатній для наступних робіт густоті пунктів державної сітки. За точністю й послідовністю розвитку сітки згущення поділяють на перший і другий розряди. їх створюють методами полігонометрії і тріангуляції.
Знімальні геодезичні сітки заповнюють сітки згущення, їх будують у вигляді теодолітних ходів, різноманітних засічок і нескладних тріангуляційних побудов. На ділянках площею до 1 км2, якщо немає даних про державні геодезичні сітки і сітки згущення, знімальні сітки будують як самостійні місцеві геодезичні сітки.

Супутниковий спосіб
Супутниковий спосіб полягає у використанні штучних супутників Землі (ШСЗ). За радіосигналами із супутників приймач у пункті спостереження на земній поверхні обчислює координати цього пункту.
В наш час працюють дві системи супутників, за допомогою яких визначають координати земних об’єктів (їх називають навігаційними, тому що довгий час обслуговували потреби транспортних засобів: повітряних, морських та наземних) — GPS (Global Position System
— глобальна система визначення координат) і ГЛОНАСС (ГЛОбальна НАвігаційна Супутникова Система). Перша з них розроблена у США, друга — російська. Складовими супутникових систем є підсистеми космічних апаратів, контролю та управління і приймачі. Супутники системи GPS обертаються у 6 орбітальних площинах по 4 супутника в кожній, а супутники ГЛОНАСС — у трьох орбітальних площинах по 8 у кожній (рис. 9.4).
результати визначення координат можливі, якщо забезпечено прийом радіосигналів одночасно від чотирьох супутників

Супутникові радіонавігаційні спостереження (СРНС)
Притаманні супутниковій геодезії методи позиціювання (визначення місцеположення)
набули назви супутникових радіонавігаційних спостережень (СРНС). СРНС-
спостереження — це метод визначення координат точок на земній поверхні та в просторі з динамічних об’єктів (ШСЗ) супутникової радіонавігаційної системи, орбітальні координати яких зафіксовані на момент спостережень шляхом розв’язання обернених лінійних засічок.
Найбільш зручною для супутникових методів позиціювання є просторова геоцентрична система прямокутних координат X, Y, Z (див. рис. 1.9), початком координат якої є відліковий центр загального земного еліпсоїда WGS-84.
На рис. 9.5 наведена схема просторової оберненої лінійної засічки робочого сузір’я з чотирьох супутників Si (Xi, Yi, Zi), і=1,2,…,k. Приймачем, розташованим в точці О, виміряні віддалі D:
Di i ( i i ) n n
де v — швидкість електромагнітних коливань на шляху «супутник-приймач», n — показник заломлення електромагнітних коливань в середовищі «іоносфера-атмосфера» (фіксовані фізичні величини); ti′ — виміряний, а t — абсолютний час проходу коливань згаданим шляхом і tі — помилка між часом годинника приймача та системним часом СРНС, тобто часом передачі сигналів з супутників
Шуканими величинами будуть координати точки О (Xо, Yо, Zо) та систематичної похибки годинника δt. Оскільки системний час єдиний, а «захват» робочих супутників приймачем відбувається практично одночасно, приймають, що tі ≈ δt є єдиною похибкою для всіх супутників. Тоді рівняння, що відповідає наведеним умовам, набуде вигляду:
( X |
|
X |
|
)2 (Y Y )2 |
(Z |
|
Z |
|
)2 |
|
2 |
( |
|
)2 |
i |
0 |
i |
0 |
|
i |
|||||||||
|
|
i 0 |
|
|
|
|
n2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Розв’язання системи відбуваються в автоматичному режимі комп’ютером приймача.
Види спостережень в супутниковій |
геодезії поділяються |
на абсолютні та відносні. |
Абсолютні спостереження полягають |
у безпосередньому супутниковому позиціюванні в |
|
точці, координати якої заздалегідь |
невідомі. Під час |
відносних спостережень |
використовують зв’язок точок, координати яких визначаються, з вихідним пунктом (координати якого відомі) через вимірювання векторів (або баз, векторів баз) — віддалей між ними.
Геодезичної точності координатних визначень досягають виключно відносними спостереженнями. Цей метод набув назви — диференціальний метод (наприклад, диференціальний метод GPS (DGPS). Він є найбільш ефективним засобом виключення спотворюючого впливу похибок СРНС-спостережень різного походження, з якими сам на сам залишаються абсолютні спостереження. Зміст методу такий: вимірювання виконують одночасно не менш як двома приймачами, що працюють з одним і тим же робочим сузір’ям супутників. Антену одного приймача розташовують в пункті з відомими координатами (базова, контрольна станція), інші — у точках, координати яких визначають. Оскільки віддалі між робочими ШСЗ та антенами приймачів значно більші, ніж відстані між приймачами, вважають, що умови прийому сигналів від супутників майже однакові, а з ними однакові й величини похибок, що супроводжують прийом цих сигналів.