

Визначення місцеположення судна оптичними методами.
Точність визначення координат на морі оптичними способами.
Визначення місцеположення судна оптичними методами
При виконанні геодезичних знімальних робіт на морі координати судна визначають різними методами. У межах прямої видимості визначення координат рухомих знімальних суден здійснюється оптичними (візуальними) методами. До цих методів належать: методи визначення місцеположень засічками, методи пеленгації і астрономічні методи. Перелічені методи знаходять застосування при вимірах, які виконуються оптико-механічною або оптико-електронною апаратурою. На даному етапі значення оптичних методів для прив’язки морських знімань та досліджень дещо понижується. Проте в ряді випадків, наприклад, при виконанні робіт поблизу берегів або острівних пунктів, при прив’язці галсів радіогеодезичними вимірами та інше, такі методи продовжують застосовувати. Слід зазначити, що визначення місцеположення в морі за допомогою теодолітів має високу точність. Однак такі визначення громіздкі та малопродуктивні. Їх ефективне використання можливе тільки при чіткій організації робіт та наявності надійного польового контролю.
Методи засічок застосовують при виконанні геодезичних робіт у прибережних акваторіях при наявності на березі достатньо розвиненої мережі опорних пунктів або достатньої кількості орієнтирів із відомими координатами. Визначення місцеположення судна в даному випадку виконується із застосуванням прямої, оберненої, полярної, лінійної та комбінованої засічок. Слід зазначити, що характерним для всіх видів засічок є синхронність виконання вимірювань, призначених для визначення координат рухомого об’єкта.
У загальному випадку пряма кутова засічка передбачає одночасну засічку судна, що знаходиться на галсі, мінімум двома теодолітами, які встановлюють на опорних берегових пунктах планової основи знімання. Для забезпечення одночасності виконання вимірювань на цих пунктах застосовують засоби радіозв’язку. Опорні пункти в даному випадку вибирають із розрахунку найбільшого огляду району робіт, а кути засічок (рис. 1) не повинні виходити за межі 20о-160о, щоб задовольнити точність геодезичних вимірів у морських умовах. Пряму засічку застосовують при віддалях між опорним пунктом і об’єктом визначень, що не перевищують 25 км.
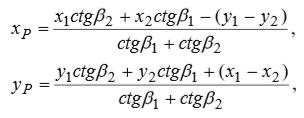
У прямій кутовій засічці вихідними даними є: плоскі прямокутні координати х, у не менше двох опорних пунктів та виміряні в один фізичний момент кути Для обчислення координат рухомого об'єкта Р існує велика кількість формул. Найчастіше застосовують формули Юнга (формули котангенсів)
(1)
або формули тангенсів дирекційних кутів напрямів з опорних пунктів на об’єкт визначення

(2)
Рис. 1 Пряма кутова засічка
Дирекційні кути 1,P і 2,P обчислюють за формулами (формули подані для розташування пунктів як на рис. 1)
P
P
Спосіб оберненої кутової засічки передбачає одночасне вимірювання з рухомого об'єкта Р двох горизонтальних кутів:
Спосіб оберненої кутової засічки передбачає одночасне вимірювання з рухомого об'єкта Р двох горизонтальних кутів секстанами:
а) між трьома опорними пунктами з вимірюванням двох суміжних кутів 1 і 2 (рис.
2а);
б) між двома парами опорних пунктів з вимірюванням двох несуміжних кутів 1 і 2 (рис.
2б).
Обернену засічку застосовують у межах прямої видимості від рухомих об’єктів. Обернену кутову засічку застосовують при віддаленнях рухомих об’єктів від пунктів наведення до 25 км. Вихідними даними є: плоскі прямокутні координати х, у не менше трьох опорних пунктів та виміряні кути 1, 2.
Для |
обчислення координат рухомого об'єкта P можна застосовувати формули |
Кнейссля: |
|
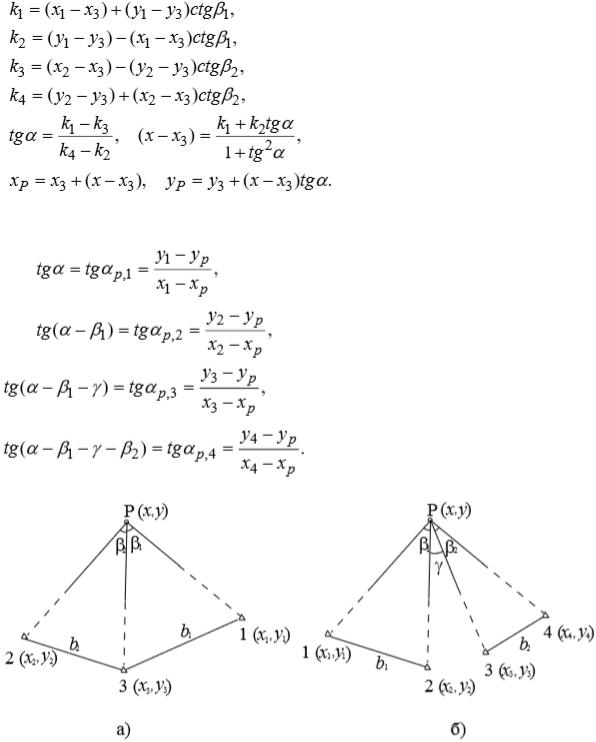
(3)
Для випадку двох пар опорних пунктів застосовують формули:
(4)
Рис. 2 Обернена кутова засічка
Спосіб комбінованої кутової засічки передбачає одночасне визначення кута секстаном на рухомому об’єкті Р і напряму з берегового теодолітного поста (рис. 3). Цей спосіб використовують у випадку, коли неможливо вибрати зручну комбінацію опорних пунктів для оберненої засічки і недостатньої кількості приладів і спостерігачів для прямої засічки.
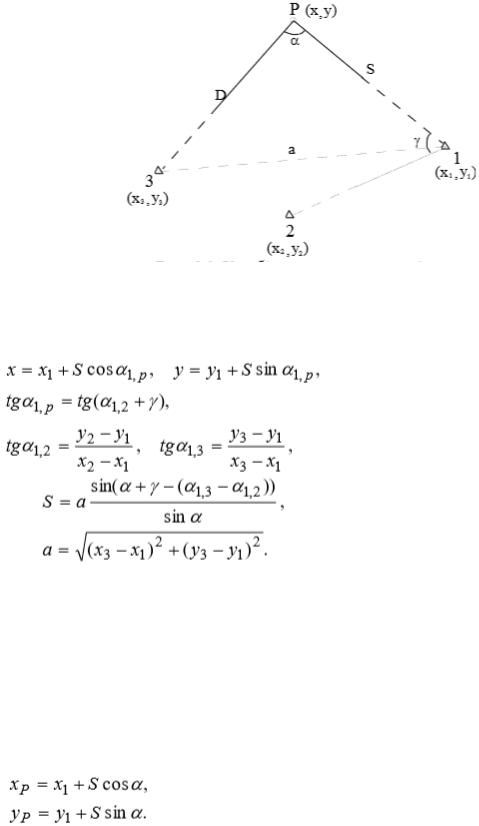
Рис. 3 Комбінована кутова засічка
Координати рухомого об’єкта при виконанні комбінованої засічки отримують за формулами
(5)
Щодо останніх двох засічок необхідно зауважити, що останнім часом їх більше не застосовують при виконанні геодезичних робіт у морських умовах. Пояснюється це появою новітніх технологій та приладів, що дозволяють з більшою точністю проводити визначення при вирішені поставлених задач.
Суть полярної засічки полягає у визначенні місцеположення судна шляхом одночасних вимірів віддалі S і напряму (дирекційного кута ) з опорного пункту 1 на судно P (рис. 4). Віддаль вимірюють віддалеміром, а напрям – теодолітом. Координати судна обчислюють за формулами:
(6)
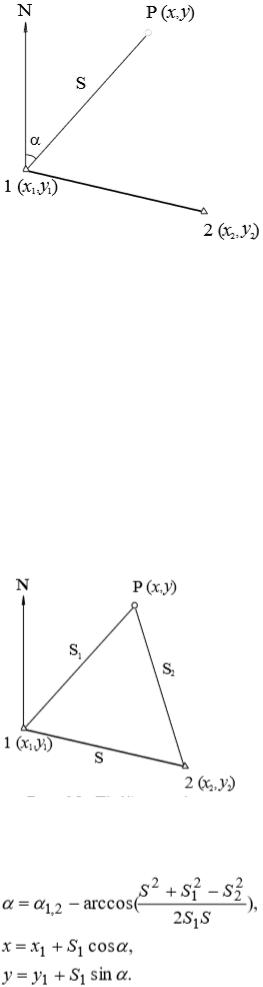
Рис. 4. Полярна засічка
Полярна порівняно з іншими засічками має ряд переваг:
1)високу і практично однакову точність визначень місцеположення судна для всього району робіт;
2)простота організації робіт;
3)мінімальна кількість виконавців робіт;
4)розташування вимірювальної апаратури в одному місці;
5)невелика кількість опорних пунктів (для виконання робіт достатньо мати два опорні пункти).
До оптичних методів відносять і лінійну засічку. Суть її полягає у визначенні координат х, у рухомого об'єкта P шляхом синхронних вимірів віддалей S1 і S2 (рис. 5).
Рис. 5. Лінійна засічка
Координати х, у обчислюють за формулами: