

Системи координат в морській геодезії. Навігаційно-геодезичні параметри і лінії положення.
Системи координат в морській геодезії
Для визначення положення в просторі необхідно задати три її координати, які визначаються у відповідності з прийнятою системою координат. Система координат характеризується формою задання координат, початком їх відліку, напрямом головної осі, положенням основної площини, вибором одиниць виміру. При визначені координат рухомих точок окрім координат необхідно знати моменти часу, що приводить до необхідності введення визначеної системи його лічби.
Різні задачі морської геодезії вимагають для свого розв’язання використання різних систем координат. В залежності від положення початку координат це може бути система геоцентричних (початок координат в центрі мас Землі) або топоцентричних (початок координат в пункті спостережень) координат. Система координат може бути земною – обертається разом з Землею, та зоряною (небесною) – з не рухомою Землею. За формою задання системи координат можна розділити на дві групи – не пов’язані з поверхнею Землі та пов’язані з нею. До першої групи відносяться, наприклад, системи просторових прямокутних геоцентричних координат (земних і небесних). До другої – системи координат, що визначають положення точки на Землі її висотою над поверхнею відносності та криволінійними координатами проекції точки на цю поверхню. В ряді випадків висота точки для розв’язання поставленої задачі не має принципового значення. Тоді поверхня Землі або її проекція на геоїд, еліпсоїд (сфероїд), сферу або площину буде представляти двомірний простір, у межах якого місцеположення точки задається двома координатами.
Прийняття поверхні океану за нулеву координатну поверхню використовується у навігації. Для виконання геодезичних обчислень за таку поверхню приймають рівневу поверхню – геоїд. Еліпсоїд (референц-еліпсоїд) є поверхнею відносності при розв’язанні більшості геодезичних, в основному високоточних, задач. Сфера застосовується для зображення земної поверхні та спрощених способів геодезичних обчислень. Площина використовується для картографічного зображення земної поверхні та розв’язання геодезичних задач за формулами плоскої тригонометрії і геометрії.
Координатні системи на еліпсоїді, сфері та площині можуть бути полярними, біполярними та криволінійними. При цьому число вихідних (опорних) пунктів може бути від одного до чотирьох: один
– полярна засічка, два – пряма засічка, три – гіперболічна засічка, чотири – при вимірах різниць віддалей, тощо. Для встановлення зв’язку між системами координат застосовують аналітичний або графічний способи.
При встановленні морської топографічної поверхні та її відхилень від рівневого еліпсоїда необхідно зафіксувати геоцентричну систему координат і нормальне гравітаційне поле, параметри якого задаються фундаментальними геодезичними сталими. Загальноприйнятою є геодезична референцна система 1980 р., встановлена на Генеральній асамблеї МГГС у Канберре. Новими результатами, отриманими за останні роки в області створення систем геодезичних координат, є рекомендації Спеціальної дослідницької групи № 5.39 по фундаментальним геодезичним сталим ХVIII Генеральній асамблеї МАГ та введена Міністерством оборони США Світова геодезична система 1984 р. – WGS-84. Остання використовується в Глобальній супутниковій радіонавігаційній системі GPS.
Система координат WGS-84 (рис. 7) – це земна прямокутна система, що введена замість системи WGS-72. Початок координат даної системи суміщений з центром мас Землі, вісь Z – паралельна напряму на умовний земний полюс (міжнародний умовний початок), вісь Х – визначається площинами початкового меридіана WGS-84 та екватора міжнародного умовного початку. Початковий меридіан WGS-84 паралельний нульовому меридіану. Вісь У доповнює систему координат до правої. Початок і положення осей координатної системи WGS-84 співпадають з геометричним центром та осями еліпсоїда WGS-84. Координатна система WGS-84

має зв’язок з інерціальною системою координат, заданою координатами зірок каталогу FK-5 на епоху 2000 року. В табл. 2.1 наведені параметри еліпсоїда WGS-84.
|
Z |
|
P |
E |
O |
E |
|
|
X |
|
Y |
|
P` |
Рис. 7. Система координат WGS-84
Таблиця 2.1
Основні параметри еліпсоїда WGS-84
|
Назва параметру |
Позначення |
|
Величина |
|
Точність |
|
|
|
|
|
|
параметру |
|
параметру |
|
|
|
|
|
|
|
|
|
|
|
|
Велика піввісь |
а |
|
6378137 м |
|
2 м |
|
|
|
Стиснення Кутова |
α |
|
1/298,257223563 |
|
|
|
|
|
швидкість |
|
|
-11 |
|
|
0,15-11 рад/с |
|
|
обертання Землі |
w |
|
рад/с |
|
|
||
|
|
7292115 |
|
|
|
|||
|
Друга зональна |
С20 |
|
-484,16685-6 |
|
1,3-9 |
|
|
|
гармоніка |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Геоцентрична |
|
|
|
|
|
|
|
|
гравітаційна стала (з |
fM |
|
|
|
|
|
|
|
урахуванням маси |
|
39860058 м3/с2 |
|
0,68 м3/с2 |
|
||
|
|
|
|
|
||||
|
атмосфери) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При встановлені системи |
WGS-84 прийнята |
швидкість |
світла |
у вакуумі, що дорівнює |
||||
с=299792458±1,2 м/с, а значення нормальної сили ваги на поверхні еліпсоїда WGS-84 обчислюється за замкнутою формулою
де В – геодезична широта в системі WGS-84.
Модель гравітаційного поля Землі світової геодезичної системи 1984 року отримана у вигляді нормованих коефіцієнтів розкладу в ряд за сферичними функціями до 180 порядку. Геоїд WGS-84 був визначений за результатами обчислень висот з використанням коефіцієнтів розкладу до 180 порядку за формулою
Висота геоїда WGS-84 характеризується середньоквадратичними похибками від 2 до 6 м. Але приблизно 70% висот геоїда отримано з похибкою 2-3 м.
Висота геоїда WGS-84 характеризується середньоквадратичними похибками від 2 до 6 м. Але приблизно 70% висот геоїда отримано з похибкою 2-3 м.
Основними системами координат, що застосовуються в морській геодезії при виконанні локальних геодезичних робіт, є:
1. Геоцентрична система просторових прямокутних координат Х, Y, Z. Оскільки ця система використовується для визначення положення штучних супутників Землі, які обертаються довкола її центру мас, тому початок відліку системи суміщається з центром мас Землі О (рис. 8). Вісь z направляється по осі обертання Землі в сторону північного полюса, вісь х – по напряму на точку весняного рівнодення. За основну площину цієї системи координат приймається площина екватора. Оскільки точка рівнодення переміщується внаслідок прецесії і нутації осі обертання Землі, то ця система координат потребує свого перетворення на момент спостережень шляхом введення відповідних поправок.
Z
X O
Y
Рис. 8. Геоцентрична система координат
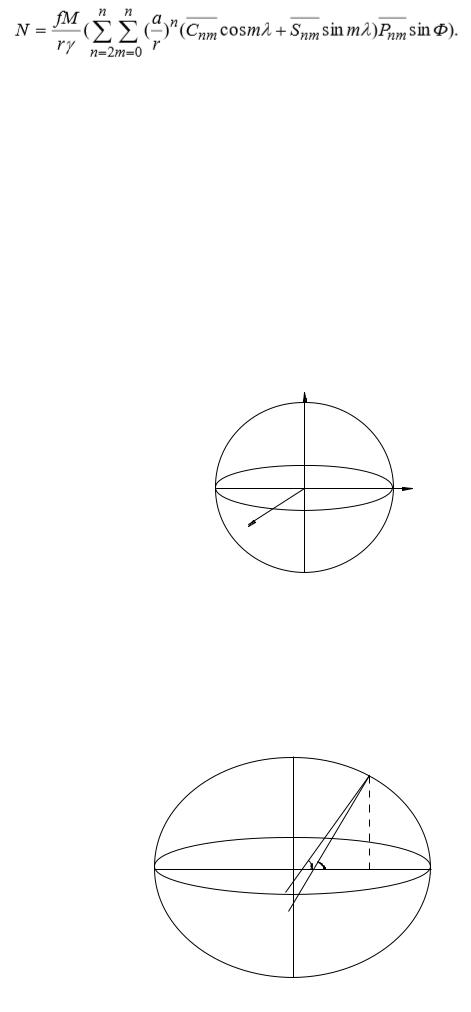
2. Географічна система астрономічних координат (рис. 9). За основну площину приймається площина середнього земного екватора на епоху вимірювань. Координатами даної системи є астрономічна широта та астрономічна довгота . Через рух полюсів Землі результати
визначень координат необхідно приводити до однієї епохи, для якої задається географічна система астрономічних координат.
3.
Pn
A
|
|
|
B |
|
E |
|
|
E |
|
O |
|
|
||
|
|
|
|
Ps
Рис. 9. Географічна система координат
4. Географічна система геодезичних координат В,L (рис. 9). На відміну від географічної системи астрономічних координат, в якій за фігуру Землі приймають геоїд, в географічній системі геодезичних координат приймають референц-еліпсоїд. В цій системі координатами можуть бути:
а) геодезичні широта В, довгота L, висота Н;
б) просторові прямокутні Х, У, Z.
Перелічені координати пов’язані між собою відомими формулами