

10.3.2. Сучасні системи
Будова GPS і ГЛОНАСС
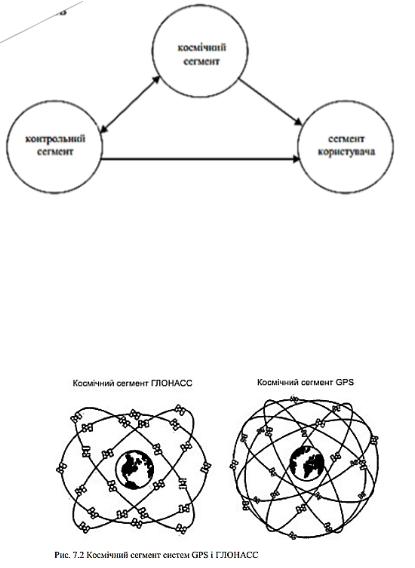
Системи GPS і ГЛОНАСС мають подібну архітектуру та принципи дії і складаються з 3 сегментів:
1. Космічного сегменту, який складається з штучних супутників Землі, що передають радіосигнали на Землю;
2. Контрольного сегменту, який стежить за функціонуванням всієї системи;
3.Сегменту користувача, який включає приймачі різних типів
Кожен із сегментів виконує дуже важливі функції і чітка робота ГНСС можлива лише при правильній роботі та
взаємодії всіх сегментів. Космічний сегмент
Космічний сегмент ГНСС — це вся сукупність ШСЗ.
В системі GPS космічний сегмент GPS являє собою систему з 24 ШСЗ, розподілених по шести майже колових орбітах (з ексцентриситетом f<0,01) з висотою біля 20200 км. Існують п'ять класів супутників GPS: Block I, Block II, Block НА, Block IIR, Block IIF. Середня кутова відстань між вузлами орбіт супутників 60°, нахил орбіт до площини екватора 55°. ШСЗ обертаються навколо Землі як одне ціле, не змінюючи своїх взаємних положень. Період обертання супутників близько 12 годин.
Проектний космічний сегмент системи ГЛОНАСС складається з 24 супутників, що рухаються на 3 орбітах (рис.7.2). Основні параметри космічних сегментів систем GPS і ГЛОНАСС представлені у таблиці 7.1.
Кожен супутник системи GPS випромінює радіосигнали на робочих частотах L!=1575,42 МГц і L2=1227,60 МГц. Сигнал на частоті Li модульовано Р, С/А—кодами, а на частоті hj — виключно Р-кодом.
Код вільного доступу С/А (Coarse Acquisition) мас частоту проходження імпульсів 1,023 МГц і період повторення 0,001 сек. Точність автономних вимірів відстаней від приймача до супутника за допомогою цього коду є невисокою.
Таблиця 7.1 Основні характеристики супутникових навігаційних систем GPS і ГЛОНАСС
Показник |
GPS |
ГЛОНАСС |
|
|
|
Сузір'я супутників |
|
|
|
|
|
Кількість супутників |
24(31*) |
24(18**) |
|
|
|
Число орбітальних площин |
6 |
3 |
||
|
|
|
|
|
Кількість |
супутників у |
кожній |
4 |
8 |
площині |
|
|
|
|
Висота орбіти, км |
|
20 300 |
19 100 |
|
|
|
|
|
|
Кут нахилу орбіти, ° |
|
55 |
64,8 |
|
|
|
|
|
|
Період |
обертання |
супутника |
12 |
11,26 |
навколо Землі год. |
|
|
|
|
Супутники |
|
|
|
|
|
|
|
|
|
Маса КА, кг |
|
1055 |
дані відсутні |
|
Потужність сонячних батарей, Вт |
450 |
дані відсутні |
||
Термін експлуатації, роки |
|
7.5 |
2-3 |
|
|
|
|
|
|
*в системі GPS для покращення роботи в умовах міської забудови (при наявності значної кількості перешкод) було вирішено збільшити кількість супутників до 36 — на даний час на орбіті присутні 31 робочий супутник
**в системі ГЛОНАСС в середині 90-х кількість супутників різко зменшилась (був момент, коли лишилось З робочі супутники). Проте в останні роки їхня кількість зросла. Так
в2005р. їх вже було 9. За офіційними даними МО РФ на даний час на орбіті 18 діючих супутників, хоча реально значно менше.
Захищений код Р (Protected) характеризується частотою проходження імпульсів 10,23 МГц і періодом повторення 7 діб. Американське оборонне відомство вжило заходів додаткового захисту Р-коду: у будь-який момент без попередження може бути включений режим AS (Anti Spoolmiz). При цьому виконується додаткове кодування Р-коду, і він перетворюється в Y-код. Розшифровка Y-коду можлива тільки апаратно, з використанням спеціальної мікросхеми, що встановлюється в GPSприймачах військового призначення.
З метою зниження точності визначення координат несанкціонованими користувачами передбачений так називаний "режим вибіркового доступу" SA (Selective Availability). При включенні цього режиму в навігаційне повідомлення навмисно вводиться помилкова інформація про похибки атомних годинників і елементи орбіти супутників, що приводить до суттєвого зниження точності навігаційних визначень.
Основу точності системи становлять атомні годинники або стандарти точного часу. Супутники типу Block II обладнані чотирма стандартами точного часу: двома рубідієвими та двома цезієвими. Довгострокова відносна стабільність частоти цих стандартів становить 10" і 10" . Високоточні стандарти частоти, які можна назвати серцем усієї електронної системи, застосовуються для генерації коливань на робочій частоті 10,23 МГц. Шляхом множення цієї частоти на 154 та 120 відповідно отримують дві частоти L1 і L-2. Двохчастотний характер сигналу важливий для усунення похибки під час визначення псевдовідстані, яка виникає через вплив іоносфери.
Варто зауважити, що існують приймачі, які здатні вловлювати і розшифровувати сигнали обох систем — GPS та ГЛОНАСС. Завдяки цьому вони швидше визначають координати точок з необхідною точністю.
Контрольний сегмент, або сегмент управління ГНСС — це комплекс наземних засобів, які забезпечують функціонування космічного сегмента, контролюють його роботу та здійснюють безпосереднє керування всією системою.
Цей сегмент в системі GPS включає контрольно-спостережувальні станції - головну і додаткові станції безперервного спостереження за ШСЗ. Головним завданням цих станцій є спостереження за супутниками з метою визначення траєкторій ШСЗ та похибок бортових атомних годинників. Крім того, через систему управління здійснюються синхронізація годинників та оновлення даних. В склад системи контрольних станцій входять:
—головна контрольна станція;
—п'ять станцій стеження (моніторингових);
—три контрольних станції.
Місцем базування головної станції є об'єднаний космічний Центр управління на авіабазі Фалькон, Колорадо-Спрінгз (США). В цьому центрі збираються результати спостережень з усіх станцій спостережень, обчислюються уточнені орбіти навігаційних супутників та оцінюється стан кожного з них і системи в цілому.
Станції спостереження розташовані в місті Колорадо-Спрінгз та на островах Гаваї, Вознесіння, Дієго-Гарсія. Кваджалейн (рис.7.3). Станції обладнані цезієвими стандартами частоти і часу та Р-кодовими приймачами і можуть одночасно відслідковувати до 11 супутників. Положення станцій відоме з високою точністю в геоцентричній системі координат WGS-84. На станціях кожні півтори секунди вимірюють псевдовідстані до всіх ШСЗ NAVSTAR, коли ті проходять над горизонтом, визначають вплив атмосфери і
пересилають |
на |
головну |
станцію |
згладжені, |
виправлені за |
іоносферну |
і тропосферну рефракції |
дані, усереднені за 15хв. |
|
Сегмент користувача
Сегмент користувачів являє собою всю множину GPS-приймачів. Приймачі мають різну будову, функції та призначення, тому їх розрізняють за різними ознаками.
Оскільки власником системи GPS є МО США, то в першу чергу приймачі поділяються на дві групи:
-PPS (Precise Positioning Service) — для точного визначення місцеположення. До цієї групи відносяться військові користувачі NATO, приймачі яких здатні приймати Y- код позбавлений AS та SA - кодування.
-SPS (Standard Positioning Service) — для стандартного визначення місцеположення. До другої групи відносяться усі цивільні користувачі, приймачі яких приймають сигнали, кодовані функціями AS та SA.
У залежності від призначення приймачі розділять на три групи:
-навігаційні. Приймачі цієї групи миттєво визначають своє місцеположення. Середня квадратична похибка визначення координат навігаційними приймачами при відсутності перешкод та виключеному SA — кодуванні супутникових сигналів не перевищує 10 м, а при включеному SA — кодуванні може досягати 200-300 м.
-геодезичні. Ці приймачі призначенні для диференційних вимірів (одночасно виміри проводяться мінімум двома приймачами) і визначення приростів координат між статично закріпленими приймачами. Точність визначення приростів координат може сягати 1 мм.
-спеціальні. Вони можуть мати саме різноманітне призначення, зокрема, визначення точного часу.
В залежності від принципу вимірювання віддалей до супутника приймачі поділяються на кодові та фазові. Деякі приймачі додатково вимірюють доплерівський зсув частоти сигналу.
Приймачі також розділяють на чотири групи за принципом вимірювання віддалей до супутника і типу сигналу, який приймається до опрацювання. Це:
-кодові приймачі;
-фазові приймачі із СІК — кодом;
-кодові приймачі із СІК та Р — кодом;
-фазові приймачі із СІК та Р— кодом.
Найчастіше цей поділ спрощують і ділять приймачі на одночастотні (приймають С/А- код), та двочастотні (приймають СІК та Р— код).
GPS — приймач складається з шести головних блоків (рис.7.5).
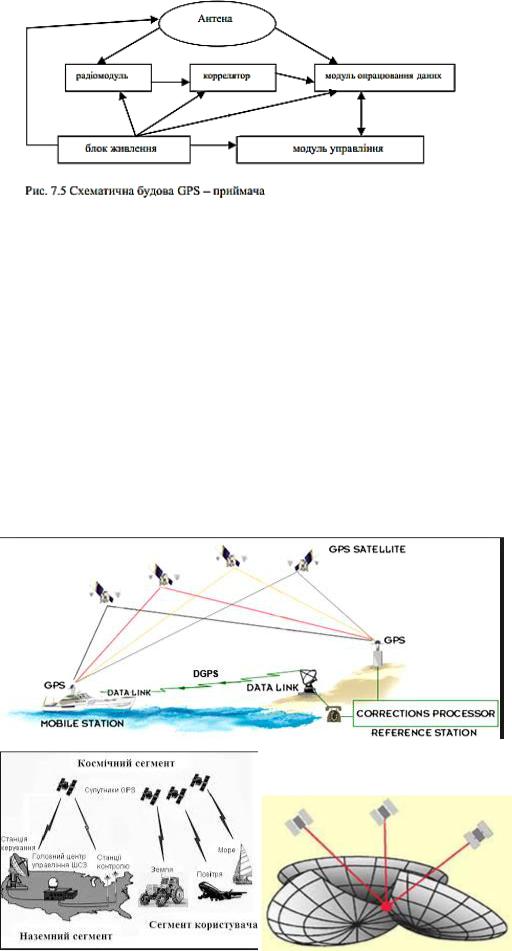
Антена приймає GPS-сигнали і передає у радіомодуль. У цьому модулі виконується підсилення сигналів і їх конвертації на низькі частоти. Корелятор призначений для синхронізації затримки і фази сигналу приймача із параметрами прийнятого радіомодулем GPS-сигналу. Сигнали всіх GPS-супутників опрацьовуються одночасно по окремих каналах. На вихід корелятора подаються дані, необхідні для пошуку і визначення супутникового сигналу, здійснення приблизних обчислень і визначення місцеположення приймача. Модуль опрацювання даних виконує алгоритмічним шляхом опрацювання прийнятих сигналів, а також оцінює параметри супутникового сигналу, розраховує місцеположення приймача. Через модуль управління приймачем оператор задає відповідні режими роботи приймача, контролює процес вимірів і їх накопичення у пам'яті приймача.
Крім системи ГЛОНАСС і GPS, роботи з розгортання глобальних навігаційних супутникових систем проводять Китай - система Бейдоу, і країни Європейського союзу - система ГАЛІЛЕО. Японія та Індія розгортають регіональні навігаційні супутникові системи QZSS і NavIC відповідно.
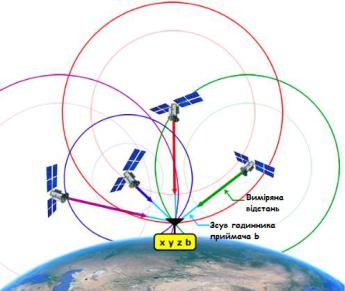
Сучасна супутникова навігація ґрунтується на використанні віддалемірних вимірювань між навігаційними супутниками і споживачем. Це означає, що споживачеві передається в складі навігаційного сигналу інформація про координати супутників. Одночасно (синхронно) проводяться вимірювання віддалей до навігаційних супутників. Спосіб вимірювань віддалей ґрунтується на обчисленні тимчасових затримок сигналу від супутника в порівнянні з сигналом, що генерується апаратурою споживача.
На рисунку приведена схема визначень місцеположення споживача з координатами x, y, z на основі вимірів віддалі до чотирьох навігаційних супутників. Кольоровими яскравими лініями показані кола, в центрі яких розташовані супутники. Радіуси кіл відповідають істинним відстаням між супутниками і споживачем. Кольорові неяскраві лінії - це кола з радіусами, що відповідають виміряним відстаням, які відрізняються від справжніх і тому
називаються псевдо.
Справжня відстань відрізняється від псевдо на величину, що дорівнює добутку швидкості світла зсув годинника b, тобто величину зміщення годин споживача по відношенню до системного часу.
На малюнку показаний випадок, коли годинник споживача випереджають
системний час, тому виміряні псевдовіддалі менше справжніх відстаней.
10.4 Методи визначення координат судна навігаційними ШСЗ.
При визначенні координат на морі застосовують два основних методи супутникової геодезії – геометричний та орбітальний (або динамічний). У геометричному методі ШСЗ використовують як візирну ціль для одночасних спостережень, що виконуються у різних пунктах земної поверхні. Цей метод є основним при створенні єдиної геодезичної мережі Землі. Точність визначення взаємного положення точок геометричним методом залежить тільки від похибок виконаних вимірювань, їх синхронізації та геометричних характеристик зв’язку виміряних та величин, які підлягають визначенню.
При орбітальному методі за спостереженнями з наземних пунктів визначають параметри орбіти супутника, після чого з’являється можливість обчислити його координати на будь - який момент часу. Тому супутник можна використовувати як рухомий опорний пункт. Орбітальний метод знайшов широке застосування у навігації для визначення місцеположення судна на морі. До похибок вимірів при цьому методі додаються похибки прогнозування орбіти супутника, які пов’язані з недостатнім врахуванням впливу гравітаційного поля Землі. При цьому точність обчислення координат супутника залежить від величини дуги орбіти, яка використовується для екстраполяції положень супутника.
Для розв’язання задачі визначення місцеположення об’єктів на морі за допомогою супутникових навігаційних систем можна застосовувати будь-яку просторову координатну систему. Як і при роботі з наземними радіотехнічними системами, визначення координат
судна за допомогою супутникових навігаційних систем здійснюється шляхом вимірювань навігаційно-геодезичних параметрів, які характеризують взаємне розташування ШСЗ і судна.
При розв’язанні задачі визначення місцеположення в морських умовах часто обмежуються визначенням двох координат, вважаючи що судно знаходиться на поверхні геоїда, висота якого над поверхнею відносності відома, тобто, відома і третя координата – висота.
Як і в наземних радіотехнічних системах, основними геометричними параметрами, які визначають взаємне положення ШСЗ і судна, є відстані і кутові віддалі. Наприклад, у сферичній топоцентричній системі координат просторове положення судна відносно ШСЗ може бути визначене відстанню між ними, її азимутом та висотою. Окрім відстаней та кутових координат навігаційно-геодезичними параметрами можуть бути різниці віддалей від судна до двох ШСЗ, різниці віддалей між одним ШСЗ та судном у різні моменти часу, суми тих самих віддалей, швидкість зміни віддалі – радіальна швидкість, радіальне прискорення.
У відповідності з видом вимірювального геометричного параметра в супутникових навігаційних системах може бути реалізованим віддалемірний, різницевий, сумарний, радіально-швидкісний та кутомірний методи визначення координат. Практичне застосування знаходять лише віддалемірний, різницевий та радіально-швидкісний методи.
У віддалемірному методі визначення місцеположення вимірювальними геометричними параметрами є віддаль ρ від судна до супутника (рис. 2). Поверхнями положення служать сфери з радіусами, що дорівнюють виміряним значенням названих віддалей у різні моменти часу. Центри цих сфер знаходяться у точках розташування ШСЗ у моменти визначення віддалей. Якщо поверхню Землі прийняти за сферичну, то ізолініями в даному способі будуть кола або ізостадії – лінії перетину двох сфер. Положення судна на поверхні Землі може бути у двох точках перетину ізоліній положення. Наявність двох рівнозначних точок визначає неоднозначність, що властива даному методу. Розв’язання даної багатозначності виконується шляхом обробки результатів вимірів із застосуванням наближених даних про місцеположення судна.
Рис. 2.Віддалемірний метод визначення місцеположення судна
Різницевий метод реалізується шляхом виміру різниць віддалей між судном і двома послідовними положеннями (S1 і S2, S2 і S3 і т.п., рис. 3) одного ШСЗ. В даному випадку віддалі між відповідними парами точок можна розглядати як базові лінії, аналогічні базовим лініям гіперболічних радіотехнічних систем. Поверхнями положення у даному методі є гіперболоїди обертання з фокусами, що співпадають із точками розташування ШСЗ на орбіті, для яких виконані виміри різниць віддалей.
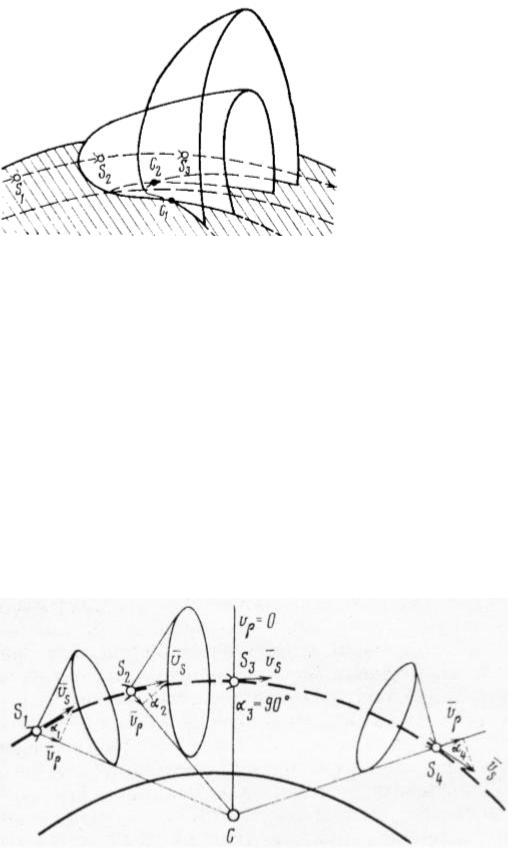
Рис. 3. Різницевий метод визначення місцеположення судна
Кожний гіперболоїд, утворений обертанням гіперболи, що відповідає значенню різниці віддалі довкола базової лінії. Перетин його з поверхнею Землі дає ізолінію у вигляді сферичної гіперболи. Місцеположення судна при реалізації різницевого методу визначається точкою перетину двох або більшого числа гіпербол. Багатозначність розв’язується в процесі обробки результатів вимірів із використанням інформації про наближене місцеположення судна.
У радіально-швидкісному методі геометричним параметром є радіальна швидкість – швидкість ШСЗ відносно судна. Вона може бути представлена проекцією вектора швидкості ШСЗ на топоцентричний радіус. Цей вектор визначає у просторі поверхню положення у вигляді прямого колового конуса, вершина якого знаходиться у точці положення ШСЗ у момент спостережень, а вісь співпадає з вектором повної швидкості супутника (рис. 4). Ізолінія, що утворюється в результаті перетину даної конічної поверхні з поверхнею Землі, представляє собою просторову криву, за формою близькою до сферичної гіперболи. Ряд вимірів радіальної швидкості, виконаних у послідовних моментах часу, дозволяє отримувати дві та більше ізолінії з точкою перетину, що визначає положення судна на поверхні Землі. Багатозначність розв’язується як і у попередніх методах.
Рис. 4. Радіально-швидкісний метод визначення місцеположення судна
Частковим випадком радіально-швидкісного методу є траверзний метод. Суть його полягає у фіксуванні моменту часу, коли ШСЗ знаходиться на найменшій віддалі від судна (на траверзі судна). Очевидно, таке положення має місце в момент кульмінації. У даному випадку конічна поверхня розгортається у площину, перпендикулярну до траєкторії польоту
супутника, а ізолінія на поверхні Землі має вигляд дуги великого кола. Місцеположення судна визначається точкою перетину її з ізолінією у вигляді сферичного кола, утвореного перетином поверхні Землі і сферичної ізоповерхні з радіусом, рівним траверзній віддалі між ШСЗ і судном. Мінімальність інформації, отриманої при виконанні робіт траверзним методом, є суттєвим недоліком, що обмежує можливості його застосування як у морських геодезичних роботах, так і у навігації.
Найбільш широке застосування при вимірах на морі знайшли радіотехнічні супутникові системи, основані на принципі Доплера. Фізична сутність ефекту Доплера проявляється у тому, що при зближенні джерела випромінювання і прийомного пристрою, останнім в одиницю часу приймається більша кількість хвиль ніж від джерела, що знаходиться на сталій віддалі від приймача. При віддаленні джерела і приймача коливань один від одного спостерігається обернена залежність. На борту ШСЗ встановлюють передавач, який випромінює частоту fо, що виробляється високостабільним генератором частоти. Внаслідок руху супутника частота f1 прийнятого на судні сигналу відрізняється від частоти fо на величину доплеровського зсуву частоти
де r – швидкість віддалення супутника від судна;
v – швидкість розповсюдження радіохвиль
Вимірювальний процес при реалізації доплеровських методів у супутникових навігаційних системах може бути зведеним до безпосереднього виміру частоти сигналу, що надходить на вхід суднового приймача. Але це дуже складний процес. Технічно простіше і точніше такі виміри виконувати на частоті биття, використовуючи для її отримання допоміжний опорний генератор.
При стабільній частоті випромінювання і заданій повній швидкості ШСЗ зміна частоти буде відбуватися відповідно до зміни кута а, причому знак fy, буде визначатися знаком cos а. При траверзному положенні ШСЗ щодо судна а=90° і доплерівська частота fn = 0. “Доплерівська крива” характеризує швидкість зміни доплерівської частоти в момент траверзу, причому нахил кривої буде тим більше, ніж ближче судно знаходиться до площини орбіти ШСЗ (рис. 4).
Вимірювальний процес при реалізації доплерівських методів у супутникових навігаційних системах в принципі може бути зведений до безпосереднього виміру частоти суднового приймача сигналу, що надходить на вхід. Однак практичне використання способу вимірів, де ШСЗ швидко змінює своє положення, на частотах у сотні мегагерц дуже проблематичне. Технічно простіше і точніше такі виміри робити на частоті биття, використовуючи для її одержання допоміжний опорний генератор, що вводиться до складу апаратури суднової станції. У такий спосіб при беззапитному методі виміру геометричних параметрів з використанням доплерівської частоти реалізується так звана схема двох генераторів.

Рис. 4. Ефект Доплера в морській геодезії
Для того щоб частота биття була завжди позитивною, опорну частоту f0 роблять відмінною від частоти f на таку величину Δf, при якій мінімальне з можливих значень прийнятої частоти f виявилося б більше опорної. Ця умова буде виконуватися, якщо f > f0 на величину Δf. У цьому випадку значення частоти f0 буде локалізовано в межах f ± Δf, отже, буде завжди позитивним. Величину Δf називають “частотою підставки”. Очевидно, у момент траверзу f = f0.
Методи визначення місця судна, які базуються на вимірюванні доплерівської частоти, розділяють на траверзний, диференціальний і інтегральний. Траверзний метод визначення місцеположення реалізується шляхом визначення моменту проходження доплерівської частоти через нуль моменту чи зміни її знака, тобто виміру в цей момент швидкості її зміни (рис. 4). З ефекту Доплера випливає, що судно і ШСЗ знаходяться на найкоротшій відстані один від одного в момент траверзу і розташовані на ізоповерхні – площині, нормальної до вектора швидкості ШСЗ. За відомими координатами ШСЗ у момент траверзу можна побудувати в просторі цю площину й у перетині її з поверхнею Землі одержати ізолінію у вигляді дуги великого кола зі значенням геометричного параметра, що дорівнює нулю. При цьому азимут цієї дуги визначають за відомими координатами і вектором швидкості ШСЗ у момент траверзу. Друга ізолінія, точкою перетину якої з першою визначається місце судна, отримується за допомогою виміру відстані між ШСЗ і судном у той же момент. Припустимо, що поблизу траверзу ШСЗ переміщується по прямолінійній орбіті і у момент t знаходиться на відстані r від судна. Вимірник частоти биття даного пристрою фіксує момент зміни знаку збільшення цієї частоти, тобто момент траверзу. Вимірник швидкості її зміни функціонує в такий спосіб. У момент початку позитивного напівперіоду частоти биття вимірник починає рахунок циклів частоти. У момент переходу частоти через нуль убік негативного напівперіоду рахунок припиняється. Число полічених циклів, помножене на період, визначає тривалість напівперіоду частоти биття.
Зі сказаного випливає, що власне кажучи визначення місця судна траверзним способом зводиться до виміру похилої віддалі в момент найбільшого зближення ШСЗ і судна та визначенню азимута цієї віддалі через відомі значення векторів швидкості ШСЗ і судна. Таким чином, за геометричними властивостями даний спосіб є кутомірно-віддалемірним.
Цей метод не знаходить широкого застосування на практиці через невисоку точність. Однак проведені в процесі його розгляду міркування показують, що параметри кривої, що показує залежність доплерівської частоти від часу вичерпно характеризують значення вимірюваних геометричних величин і відповідні їм ізолінії на поверхні Землі, у перетині яких визначається місце судна. При цьому, мабуть, одній з ізоліній, утвореній в перетині поверхні Землі з площиною, перпендикулярній до вектора швидкості ШСЗ, відповідає постійне значення fд, у даному випадку рівне нулю. Ізолінії, що відповідають постійному значенню доплерівської частоти, називаються ізодопами. На закінчення відзначимо, що траверзний
метод єдиний із усіх частотних доплерівських методів, яким можна вимірювати віддалі між ШСЗ і судном.
У диференціальному методі, більш загальному у порівнянні з траверзним, обмежуються вимірами частоти в момент траверзу. Виконують ці вимірювання або протягом усього періоду проходження ШСЗ у зоні радіовидимості судна, або протягом деякої його частини. При цьому доплерівська частота безпосередньо не вимірюється, а визначається шляхом підрахунку збільшення числа періодів коливання частоти биття за малий проміжок часу Δt = t2 – t1. Зазначене збільшення можна інтерпретувати як фазовий набіг (у циклах), що виникає внаслідок зміни віддалі r між судном і ШСЗ за час t. Математично такий підрахунок являє собою інтегрування доплерівського зсуву частоти за часом.
Якщо часовий інтервал настільки малий, що зміни у ньому можна вважати лінійними, то обмірюване таким способом значення відноситься до середини цього інтервалу. Практично рахунок циклів частоти биття триває протягом 2-5 секунд. Вектор визначеної радіальної швидкості ШСЗ визначає в просторі положення судна у вигляді прямого кругового конуса. У перетині з поверхнею Землі він утворить ізолінію – ізодопу, яка за геометричними властивостями близька до сферичної гіперболи, характерною властивістю якої є сталість доплерівського зміщення частоти.
Таким чином, у диференціальному способі вимірюваним геометричним параметром є миттєва радіальна швидкість ШСЗ. Система, що функціонує на даному принципі, за геометричними властивостями одержуваних ізоліній є гіперболічною.
Інтегральний спосіб визначення місця по суті є узагальненням попереднього – диференціального. Відмінність цього способу полягає у тривалості інтервалу інтегрування, що в інтегральному методі в різних типах прийомоіндикаторів складає: 5 хв, 2 хв, 30 с, 24 с. Розширення інтервалу інтегрування дозволяє безпосередньо за результатами доплерівських вимірів одержати геометричний параметр у вигляді різниці віддалей між судном і навігаційним ШСЗ, що мали місце в моменти часу, що відповідають границям інтервалу інтегрування. Математично процес виміру доплерівського зсуву частоти в даному способі, як і в диференціальному, складається з підрахунку числа циклів частоти биття на інтервалі Δt = t2 – t1.
Різниця віддалей визначає в просторі поверхню положення судна у виді гіперболоїда обертання з фокусами в точках положення ШСЗ у моменти t1 і t2. У перетині з поверхнею Землі гіперболоїд утворить сферичну гіперболу, одна з точок якої є місцем розташування судна. При інтегральному методі доплерівські виміри, як правило, виконують на протязі усього періоду перебування ШСЗ у зоні радіовидимості судна, причому кінець кожного попереднього інтервалу інтегрування є початком наступного. Для ШСЗ із висотою орбіти порядку 1100 км період радіовидимості може досягати 15-16 хв. Отже, за одне проходження ШСЗ може бути отримане до восьми ліній положення при Δt = 2 хв. і до 40 ліній положення при Δt = 24 с. Отримувана в процесі спостереження за супутником інформація обробляється на ЕОМ за методом найменших квадратів з використанням наближених даних про місцеположення судна для розв’язання неоднозначності в результаті визначення місця.
10.5 Супутникова альтиметрія.
Під супутниковою альтиметрією розуміють метод визначення висот геоїда на акваторії Світового океану відносно земного еліпсоїда. В цьому методі використовують альтиметр, який
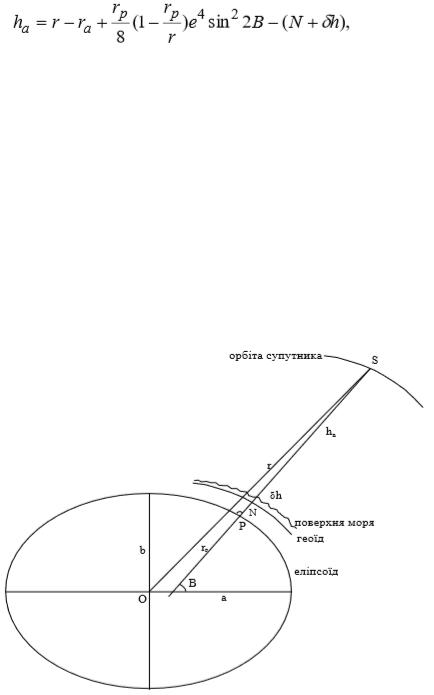
розміщений на борту супутника. Відстань між супутником і хвильовою поверхнею моря ha вимірюють за допомогою радіохвиль (рис. 5).
Підставою для таких визначень є рівняння спостереження
де: е – перший ексцентриситет прийнятого еліпсоїда обертання;
r – радіус-вектор супутника;
rр – радіус-вектор точки Р еліпсоїда;
В – геодезична широта точки Р;
N – висота геоїда;
ha – виміряна відстань між супутником і поверхнею моря;
δh – відхилення хвильової поверхні моря від геоїда.
За фотографічними, доплерівськими, лазерними та іншими спостереженнями супутника зі станцій слідкування визначають параметри орбіти супутника, за якими отримують його геоцентричні координати для моменту спостереження.
Рис. 5. Метод супутникової альтиметрії
Враховуючи, що супутникова альтиметрія грунтується на вимірюванні відстаней від супутника до миттєвої поверхні океану, яка не співпадає із середнім рівнем моря і поверхнею геоїда, можна зробити висновок про можливість застосування цього методу для дослідження поверхні Світового океану. Використовуючи дані про параметри орбіти ШСЗ GEOS-3 виконані визначення висот геоїда в південній частині Тихого океану і побудована карта з вертикальним перерізом 1 м (рис. 6). За даними середніх значень аномалій сили ваги трапецій 1º*1º, які отримані з сумісного опрацювання супутникових висотомірних і наземних гравіметричних визначень, побудована карта висот геоїда Світового океану з перерізом 2 м. точність карти складає 0,5-2 м
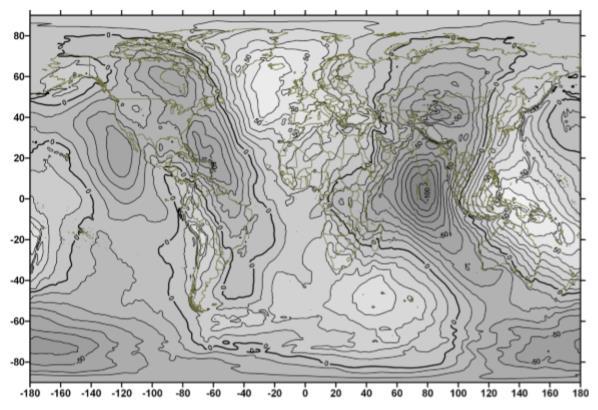
Рис. 6. Карта висот геоїда
Карта висот геоїда (рис. 6) показує, що геоїд вище референцеліпсоїда в західній частині Тихого, південній частині Індійського і в північній частині Атлантичного океану та нижче – в Азії, Північній Америці і в тихоокеанському секторі Антарктиди.
Гравітаційне поле Землі як відомо, є найбільш впливовим і відіграє важливу роль в живій і неживій природі. Різні характеристики гравітаційного поля використовують для вивчення фігури Землі і її внутрішньої будови, для розрахунку траєкторій штучних супутників Землі.
Гравітаційне поле Землі прийнято ділити на нормальну і аномальну частини.
Нормальне гравітаційне поле відповідає простій моделі, яка є близькою до реальної Землі. За фігуру такої моделі приймають еліпсоїд обертання.
Аномальне поле характеризує деталі реального гравітаційного поля Землі.
Взагалі гравітаційне поле Землі характеризується дуже складним щодо географічного розподілу аномалій в глобальному і регіональному масштабах. Сучасна морська гравіметрична апаратура дозволяє вимірювати аномалії сили ваги з точністю до 0,1-0,3 мГал, що дає можливість вивчати глибинну будову дна морів та океанів, а також виконувати пошуково-розвідувальні роботи на нафту і газ в межах шельфової зони. Значення аномалій у вільному повітрі в океанах мають порядок 20-30 мГал, іноді, але дуже рідко, досягають величини 100 мГал і більше. Зі збільшенням глибини аномалії сили ваги зменшуються приблизно на 11 мГал на 1 км глибини.
За даними результатів гравіметричних вимірювань відома максимальна додатня аномалія – 669 мГал (вулкан Мауна Кеа на Гавайських островах, а максимальна від’ємна – 338 мГал (Пуерто-Ріко). Середньоквадратичне значення перевищень геоїда над загальним земним еліпсоїдом – 33 м. Узагальнені профілі поверхні геоїда на паралелях, які отримані з допомогою штучних супутників Землі, представлені на рис. 7.
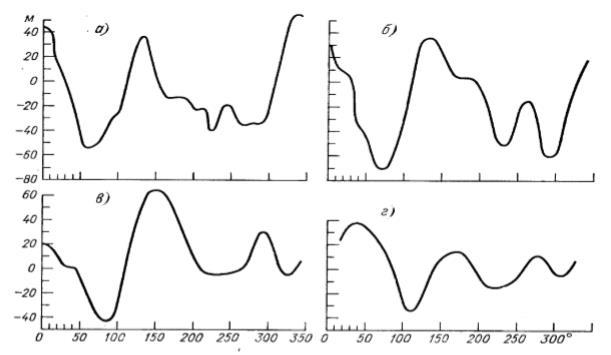
Рис. 7. Узагальнені профілі поверхні геоїда
Так, профіль на паралелі 40˚ північної широти наведено на рис. а), 20˚ північної широти
– рис. б), 20˚ південної широти – рис. в), 40˚ південної широти – рис. г).
Гідроакустичні вимірювання в морській геодезії.
Найбільш розповсюдженою апаратурою для знімання морського дна є гідроакустична апаратура. Вона використовується для виконання всіх можливих видів геодезичних робіт в гідросфері. За конкретним призначенням гідроакустичні засоби розділяють на групи: гідролокаційна, навігаційна, науково-дослідна. До гідролокаційної групи відносять ехолоти та гідролокатори, до навігаційної – гідроакустичні лаги та засоби для визначення координат пунктів, до науково-дослідної – прилади для вимірів швидкості звуку у воді.
1. Ехолоти
Ехолоти використовують для вимірів: висот точок донного рельєфу при топографічному зніманні дна океанів, морів та внутрішніх водоймищ; глибин автономних підводних апаратів і акустичних знімальних приладів; глибин в точках встановлення донних гравіметрів.
Усі типи ехолотів складаються з центрального приладу, вібратора-випромінювача і вібратора-приймача.
В центральному приладі розміщені основні вузли ехолота, що призначені для формування посилочних імпульсів, перетворення відбитих імпульсів та реєстрації глибини.
Принцип виміру глибини ехолотом полягає у визначенні проміжку часу t між посиланням ультразвукового сигналу та його прийомом після проходження відстані від вібратора-випромінювача до дна і назад до вібратора-приймача.
В момент посилання імпульсу на рухомій стрічці самописця пером або спіраллю робиться нульова відмітка. Отриманий ехоімпульс після перетворення та підсилення поступає на перо самописця, яке за час проходження імпульсу переміщується на кут або відстань, пропорційній цьому часу.
На стрічці, в місці дотику з пером, випалюється мітка, що відповідає виміряній глибині. Відстань на стрічці між нульовою відміткою та відміткою відбитого імпульсу, співвідношена з масштабом запису, дає виміряну глибину.
При постійній роботі ехолота на стрічці утворюється безперервний запис лінії нуля та лінії профілю дна. Виміряна глибина z визначається з виразу
де: v – швидкість звуку у воді,
L – довжина бази між вібраторами.
Різноманітність типів ехолотів, суттєві розбіжності властивих їм ознак та характеристик обумовлює можливість, а для користувачів і необхідність їх класифікації. В табл. 6.1 наведено опис деяких типів сучасних ехолотів.
Єдиного підходу до розділення ехолотної техніки на класи поки що не існує.
Найбільш часто існуючі типи ехолотів класифікують за наступними ознаками:
за призначенням,
за принципом дії,
за діапазоном випромінювання,
за частотою випромінювання,
за точністю,
за індикацією результатів.
За призначенням ехолоти розділюють на три групи: навігаційні, промірні, рибопошукові. Перші встановлюють на надводних судах та підводних човнах. Основне їх призначення – забезпечення безпеки плавання і уточнення свого місцеположення з виміром глибини.
Основним призначенням промірних ехолотів є вимір глибин з метою картографування, розв’язання задач морської геодезії, морської геології, морської геофізики, гідрології, гідроакустики.
Призначення рибопошукових ехолотів визначається їх назвою.
За принципом дії ехолоти розділюють на гідроакустичні і лазерні.
Гідроакустичні ехолоти бувають двох різновидів: магнітострикційні і п’єзоелектричні.
Перші основані на перетворенні електромагнітних коливань в звукові і назад за допомогою спеціальних вібраторів.
В других використовується ефект появи змінних електричних зарядів на електродах приймача при впливі на нього змінного звукового тиску.
Лазерні ехолоти – ладари, що працюють на принципі світлової локації, призначені для подвійного виміру відстаней – через повітря і воду.
За діапазоном дії ехолоти розділюють на глибоководні, океанічні, морські та річкові. Глибоководними ехолотами вимірюють найбільші глибини океанів.
Океанічні ехолоти діють до глибин 2-6 км.
Морські ехолоти забезпечують виміри в межах шельфу та частин берегового схилу до глибин 300-500 м.
Річкові (катерні) ехолоти працюють до глибин 50-100 м.
При глибинах до 20 м виміри глибин виконують за допомогою наметки або ручного лота. Точність вимірів в даному випадку залежить від типу грунту, наявності рослинності, течій та хвилювання. Вона характеризується похибками 5-10 см на глибинах до 5 м та 10-20 см – на більших глибинах.
За частотою випромінювання ехолоти, що працюють на гідроакустичному принципі, розділюють на звичайні, високочастотні та низькочастотні.
Перші призначені для вимірів більшої частини глибин (нагадаємо, що глибини до 6 км складають в Світовому океані біля 99%). Ці ехолоти мають частоту випромінювання порядку
50 кГц.
Високочастотні ехолоти, що застосовуються в основному на мілководді, мають частоту коливань у 2-3 рази вищу.
Глибоководні ехолоти працюють на більш низьких частотах (10-20 кГц), що дозволяє підвищувати проникливу спроможність імпульсів випромінювання.
Індикація результатів вимірів в ехолоті може бути візуальною або документальною. При візуальній індикації відліки знімаються з відповідних цифрових табло або фіксуються спалахи неонової лампи у відповідному місці шкали глибин.
Документальна індикація здійснюється в аналоговій формі – на стрічці самописця, або в цифровій – друк на стрічку або промірний планшет. Останнім часом вся інформація в основному передається прямо на комп’ютер.
2. Похибки визначення глибин ехолотом
Як і будь-які виміряні величини, глибини, що вимірюються ехолотом, обтяжені систематичними і випадковими похибками.
Систематична частина похибки зводиться до мінімуму таруванням ехолота або визначенням поправки за гідрологічними даними.
Випадкова складова, сумісно з неврахованою систематичною, характеризують точність виміру глибини ехолотом.
Систематичні похибки виникають внаслідок:
1)відхилення фактичної швидкості звуку від розрахункової;
2)відхилення фактичного числа обертів електродвигуна від розрахункового;
3)незбіг площини вібратора ехолота з поверхнею води;
4)наявності бази між вібратором-випромінювачем та вібраторомприймачем;
5)незбіг моменту посилання звукового імпульсу вібратором і моменту його реєстрації на ехограмі у вигляді лінії нуля;
6)зміни осадки судна на ходу;
7) нахилу дна.
Кожна з перелічених похибок може бути розрахована та вилучена шляхом введення відповідної поправки.
Величини поправок можна підрахувати за наступними формулами:
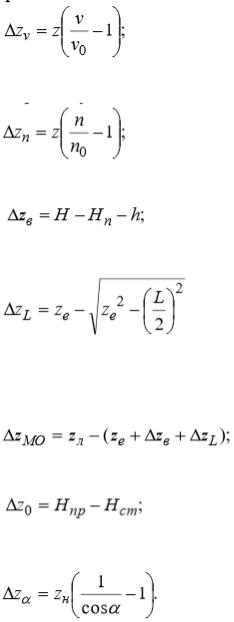
1)за відхилення швидкості розповсюдження звуку ;
2)за відхилення обертів електродвигуна
3)за незбіг площини вібратора ехолота з поверхнею води
4)за базу між вібраторами
(у ехолотів з моновібраторами ця поправка відсутня);
5)за незбіг моменту посилання та реєстрації звукового імпульсу (за місце нуля)
6)за зміну осадки судна на ходу ;
7)за нахил дна
У наведених формулах прийняті позначення:
zе – глибина, виміряна ехолотом при наявності бази між вібраторами; z – глибина, виміряна ехолотом з моновібратором;
zл – глибина, виміряна дротовим лотом;
zн – глибина, виміряна ехолотом до найближчої точки нахиленої ділянки дна; v0, v – розрахункова і фактична вертикальні швидкості розповсюдження звуку; n0, n – розрахункове і фактичне число обертів електродвигуна;
Н, Нп – відстані по вертикалі від палуби до кіля (надане в паспорті судна) та від палуби до горизонту води;
h – відстань від кіля до вібраторів (надане в паспорті судна);
L – відстань між вібраторами (база);
Нпр, Нст – осадка судна на ходу під час проміру та на стоянці;
- кут нахилу дна.
Оцінимо вплив деяких похибок на сумарну похибку. Похибка за незбіг фактичної та розрахункової швидкості розповсюдження звуку у воді зростає зі збільшенням глибини та величини v від v0. При відхиленні швидкості розповсюдження на 15 м/с систематична складова похибки виміряної глибини буде дорівнювати 1% від глибини. У аналогічній залежності знаходяться виміряні глибини і по відношенню до відхилення фактичного числа обертів електродвигуна від розрахункового. Відхилення числа обертів від номіналу на 1% викликає зміну глибини приблизно на таку ж величину. Величина заглиблення вібратора повністю входить в систематичну складову похибку виміряної глибини. Похибки за базу мають невелику величину. Вони враховуються тільки при промірах малих глибин ехолотами, які мають базу до 2 м. Похибка за просідання враховується також тільки при вимірах малих глибин. Поправка для вилучення цієї похибки визначається шляхом багаторазового виміру однієї глибини на ходу і на стопі. Похибка за неврахування нахилу дна при зніманні шельфу звичайно не враховується. Її величина при кутах нахилу дна до 8о мала, тому при виконанні проміру цією величиною нехтують.
3 . Визначення поправок у виміряні глибини ехолотом
Як було вказано раніше систематичну частину похибки виміру глибини можна виявляти шляхом проведення тарування ехолоту.
Суть тарування полягає у визначеннях глибин, отриманих ехолотом, і порівняних з глибинами, виміряними еталонними приладами.
Тарування виконується на таких горизонтах: 2, 3, 4, 5, 7, 10, 15, 20, 30, 40, 50 і 60 м.
На глибинах більше 60 м тарування не рекомендується.
Діючими нормативними документами передбачено виконання тарування трьома способами: за допомогою контрольної дошки, за допомогою контрольного вібратора і, як виключення, за грунтом.
Визначення поправок ехолота на глибинах більше 60 м здійснюється шляхом розрахунку та підсумування впливу всіх поправок. При цьому поправка за просідання не враховується, а поправка за швидкість розповсюдження звуку розраховується на основі гідрологічних даних.
Точність виміру глибин тісно пов’язана з частотою випромінювання, а остання визначається діапазоном дії ехолота.
В даному випадку маємо, що чим на більші глибини розрахований ехолот, тим нижча частота випромінюваних акустичних коливань і нижча точність визначень глибин. При цьому слід зауважити, що точність виміру глибин визначається, по-перше, відносною похибкою, яка залежить від глибини і в більшій степені визначається неточністю знання фактичної швидкості розповсюдження звуку у воді, подруге, дозвільною спроможністю ехолоту.
Доведено, що похибка за рахунок неточності знання реальної швидкості звуку у воді може сягати 0,5% від виміряної глибини. Дозвільна спроможність ехолота залежить від ряду причин – частоти випромінювання та масштабу запису результатів вимірів. Останнім часом при вимірах великих глибин застосовують ехолоти з записом на широкій стрічці самописця, що дозволяє фіксувати океанські глибини з похибкою біля 1 м. Такі ехолоти мають високу стабільність роботи. В літературі їх називають прецизійні.