


Багатопроменеві ехолоти
Для ефективного виконання промірних робіт на великих акваторіях, а також там, де потрібно детальна топографічна зйомка дна, використовуються багатопроменеві ехолоти (БПЕ), іноді звані сонарами або гідролокаторами.
Застосування багатопроменевих ехолотів в порівнянні з однопроменевими в десятки разів збільшує ширину смуги сканування і істотно покращує якість і продуктивність виконання знімальних робіт. Принцип дії багатопроменевих ехолотів заснований на формуванні трансд'юсером пучка вузьких променів, що розходяться віялом у площині, перпендикулярній напрямку руху судна.
Як правило, БПЕ складається з процесорного блоку (зазвичай об'єднаного з потужним комп'ютером з прикладним програмним забезпеченням для виконання багатопроменевої зйомки), передавальної і приймаючої гідроакустичних антен. Обов'язковим доповненням до самого багатопроменевого ехолоту є:
■датчик швидкості звуку - для вимірювання швидкості звуку у воді в режимі реального часу;
■GNSS приймач для морських додатків - для визначення координат і курсу судна, точного часу;
■датчик динамічних переміщень - для визначення значень хитавиці, поперечного і подовжнього кренів;
■профілограф швидкості звуку - для вимірювання профілю швидкості звуку у воді.
■Замість GNSS приймача для морських додатків і датчика динамічних переміщень може використовуватися система позиціонування і орієнтації - для визначення координат, курсу судна, точного часу, качки, поперечного і подовжнього кренів.
■Дані з цих датчиків, передані в реальному часі в процесор, враховуються при визначенні глибин.
Багатопроменеві ехолоти рекомендується застосовувати для:
■картографування акваторій портів, внутрішніх водних шляхів та судноплавних каналів;
■виконання детальної зйомки рельєфу дна на акваторіях, де здійснюється підводне будівництво або днопоглиблення;
■інспектування, виявлення і картографування підводних об'єктів;
■обстеження гідротехнічних споруд, підводних об'єктів і трубопроводів;
■використання в системах безпеки акваторій.
Провідним світовим виробником багатопроменевих ехолотів є датська компанія
TELEDYNE RESON.
Скануючі сонари
Скануючі сонари дозволяють отримувати 3D хмари точок з високою розподільною здатністю шляхом механічного обертання голови сонара, який знаходиться в стаціонарному положенні під водою (сонар, як правило, встановлюється на штативі або на ROV). Система
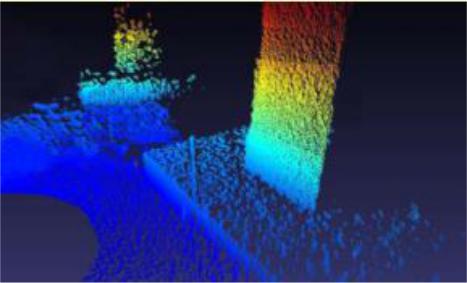
механічно сканує обрану область вузьким вертикальним сонарним променем навколо місця установки сонара.
У кожному напрямку сканування створюється профіль / обрис поверхні об'єкта (що знаходиться в зоні сканування), який потім додається до інших профілів суміжних напрямів, тим самим створюючи кінцеву хмару 3D точок, подібне показаному на рисунку
За допомогою механічного скануючого сонара з'явилася можливість отримання підводних 3D зображень, подібних лазерному скануванню, навіть при низькій і нульової видимості у воді та їх подальшої безшовної інтеграції із зображеннями надводної частини об'єкта, отриманими традиційним лазерним наземним скануванням.
4. Гідролокатори
На відміну від ехолотів, що зондують водне середовище у вертикальному напрямку, гідролокатори функціонують на принципі бічного огляду та забезпечують отримання інформації про рельєф дна не тільки під кілем судна на промірних галсах, а і у побічній зоні уздовж простору його маршруту – у міжгалсових просторах.
Гідролокатори мають ряд позитивних якостей: висока працездатність, надійне виявлення характерних форм та елементів донного рельєфу, висока дозвільна спроможність, відтворення знімальної поверхні у традиційному для геодезичного виробництва вигляді, відсутність необхідності у просторовій стабілізації акустичного випромінювання.
Як і ехолот, гідролокатор працює за принципом випромінювання та прийому відбитих ультразвукових хвиль.
Визначення відстані до виявленого об’єкту зводиться до виміру малих проміжків часу між моментом посилання та повернення відбитого сигналу. Вібратор, розміщений у виносному пристрої, посилає пучок променів, зібраних в конус. Шлях, що проходить ультразвуковий імпульс, відповідає подвійній відстані між вібратором і об’єктом.
Завдяки направленому випромінюванню та прийому імпульсів при горизонтальному огляді можна визначити напрям звукового конуса відносно діаметральної площини судна – курсового кута (КК).
Знаючи істинний курс (ІК) судна можна отримати істинний пеленг (ІП) об’єкту

де індекси лб і пб означають лівий і правий борти судна.
Гідролокатори розділяють:
а) за характером спостережень – на станції крокового пошуку, колового та бічного огляду;
б) за режимом випромінювання енергії – на імпульсні і безперервного випромінювання; в) за місцем встановлення вібраторів – на підкільові та буксирувальні.
Вгідролокаторах крокового пошуку ультразвукова енергія розповсюджується в межах направленого конусу. Сканування цього конуса в горизонтальній площині здійснюється обертанням вібратора.
Вгідролокаторі колового огляду випромінювання ненаправлене, а прийом відбитого імпульсу направлений.
Переваги останніх полягають у менших витратах часу на обстеження довколишнього простору, меншої ймовірності пропуску шуканих об’єктів, можливості знаходження відразу декількох об’єктів.
Недоліком гідролокаторів колового огляду є менша точність визначення відстаней та напрямів.
Гідролокатори бічного огляду мають дві акустичні антени. Характеристики направленості антен орієнтовані перпендикулярно до діаметральної площини носія з двох сторін від його бортів. Обстеження поверхні дна здійснюється при русі носія вперед за смугами, паралельними курсу руху.
В останні роки при виконанні морських знімальних робіт почали застосовувати акустичні голографічні системи. Їх застосування дозволяє прискорити процес виявлення об’єктів на дні моря та дає можливість сформувати видиме зображення предмету за його акустичним невидимим зображенням.
Розглянуті ехолоти і гідролокатори відносяться до ультразвукової техніки. Останнім часом для вивчення окремих важливих ділянок морського дна застосовується лазерна апаратура. Розвиток лазерної техніки йде в двох напрямах: створення апаратури для виявлення підводних об’єктів і створення лазерних вимірювачів глибини. Слід зауважити, що направленість випромінювання лазера значно перевищує направленість гідролокаційних пристроїв. Другою перевагою лазерів перед гідролокаторами є миттєва швидкість розповсюдження світлового променю. Велика дозвільна спроможність лазерного променю дозволяє отримувати телевізійні зображення дна, оглядати ґрунт, вивчати мікроформи рельєфу.
Оглядові гідролокатори
Окремою групою оглядових сонарів є гідролокатори, що дивляться вперед (або гідролокатори переднього огляду), які формують зображення за курсом надводного судна або підводного апарату (ROV або AUV).
Оглядові гідролокатори (або вперед споглядаючі гідролокатори або гідролокатори переднього огляду) формують зображення підводної обстановки в режимі реального часу і являються ідеальними інструментами для задач підводної візуализації та генерування
зображень з високою роздільною здатністю незалежно від наявності мулистих суспензій у товщі води.
Гідролокатори переднього огляду - незамінний інструмент для задач, де без візуалізації
вреальному часі не обійтись:
для підтримки виконання підводних будівельних проектів;
для укладання трубопроводів при перетині ними існуючих підводних конструкцій (або комунікацій тощо);
для обстеження акваторій та стану гідротехнічних споруд портів;
для виявлення і локалізації витоків у морське середовище;
для розмінування (MCM);
для судноводіння в районах зі складними навігаційними умовами;
та ін.
Крім цього вперед споглядаючі сонари можуть використовуватися в якості датчиків в системах безпеки портів, гаваней, військових кораблів, об'єктів військово-морського флоту та ін. - для виявлення бойових підводних апаратів або диверсантів. Для таких програм вони можуть встановлюватися як стаціонарно, так і на мобільних підводних та надводних засобах.
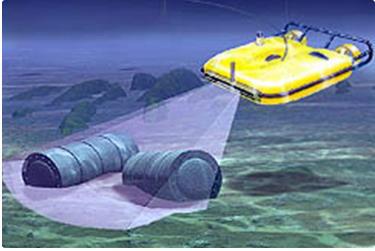
Гідролокатори бокового огляду
Гідролокатори бічного огляду (ГБО) призначені для майданного картографування морського дна, при цьому якість одержуваних акустичних зображень близько до якості фотографії. За допомогою ГБО можна виявляти і ідентифікувати розташовані на дні підводні об'єкти.
Головними елементами гідролокатора є гідроакустичний випромінювач (або випромінююча антена), який генерує звукові імпульси - пінги, і гідроакустичний приймач (або приймаюча антена), що приймає відбиті акустичні сигнали. Як правило, випромінювач і приймач ГБО інтегруються в один блок - приймально-передавальну гідроакустичну антену (трансдьюсер) і поміщаються в корпус забортного пристрою. Забортний пристрій ГБО може або жорстко закріплюватися на забортній штанзі (або на корпусі судна), або буксируватися за судном. Для отримання якісної зйомки з хорошою деталізацією об'єктів на дні забортний пристрій ГБО має рухатися на заданій глибині (як правило, 5-20 м від дна).
Випромінювач ГБО з високою швидкістю (до 20 разів на секунду) випускає короткі звукові імпульси в напрямку перпендикулярному до руху судна. Дно і розташовані на ньому об'єкти відображають звукові імпульси, які приймаються приймачем ГБО. Для кожного імпульсу приймач записує час проходження імпульсу, амплітуду та інші його параметри, і
передає ці дані в процесорний блок для обробки. Потім оброблена по кожному імпульсу інформація збирається порядкого, створюючи в реальному часі загальну картину поверхні дна під рухомим судном.
Також як і будь-який акустичний гідролокатор, ГБО показує тільки обриси поверхні дна і підводних об'єктів, які відображають акустичні хвилі. Металеві конструкції, окремі камені і кам'янисті породи дуже добре відображають звукові імпульси, створюючи сильні відбиті сигнали (світлого кольору на зображенні), а глина і мулисті донні відкладення мають погану відображає здатність і, відповідно, дають слабкий відбитий сигнал (темного кольору). За тіні об'єкта на зображенні, отриманої за допомогою ГБО, можна визначити висоту об'єкта, його ширину (протяжність).
ГБО широко використовуються в наступних задачах:
будівництво та інспекція підводних споруд;
пошук затонулих кораблів;
пошукові та рятувальні операції;
виявлення людей, які потонули;
морська археологія;
виявлення мін;
геологічне обстеження та ін.
Вимірювачі рівня моря
Вимірювач рівня моря або мареограф або реєстратор рівня води або вимірювач рівня води (іноді так званий лімніграф, прілівомер, самозаписуваний футшток) - прилад для вимірювання і безперервної автоматичної реєстрації коливань рівня води в морі і водоймах (озерах, водосховищах і т.п.).
5. Гідроакустичні лаги
Гідроакустичні лаги – це прилад для вимірювання швидкості руху і пройденого судном шляху. Їх розділяють на абсолютні і відносні. Абсолютні призначені для вимірювань швидкості судна відносно донного ґрунту, відносні – відносно водного середовища. При виконанні морських знімальних робіт широко застосовуються доплеровські гідроакустичні лаги. Принцип дії такого лага базується на визначенні швидкості судна за доплеровським зміщенням акустичної частоти, що випромінюється з борта судна.
Для визначення координат використовують гідроакустичні навігаційні системи. Ці системи використовуються для створення місцевої координатної системи з метою визначення місцеположення надводних і підводних суден. Початок координатної системи знаходиться на судні або на дні моря. Визначення місцеположення виконують відносно транспордерів (маяківвідповідачів) віддалемірним, різницевим та іншими методами. З використанням неперервних або дискретних ультразвукових сигналів розрізняють довгобазисні, короткобазисні і ультракороткобазисні гідроакустичні навігаційні системи.
Автономні методи визначення координат в морі.
Для автономних методів на відміну від описаних раніше методів визначення місцеположення рухомого об’єкта в морі не потрібно знати опорних або вихідних пунктів, а лише точні координати початкової точки маршруту рухомого об’єкта і форму поверхні, на якій він переміщується. Шляхом неперервного вимірювання елементів руху судна (швидкість і напрям) та неперервного інтегрування в часі можна отримати весь його шлях і визначити його положення в будь-який момент часу. Отже, ці методи і пристрої, за допомогою яких виконуються вимірювання, можна назвати інтеграційними. До них належать: метод счислення, метод розрахунку шляху, інерційні навігаційні системи, доплерівські гідроакустичні лаги тощо. Счислення як автономний метод визначення координат виконують за допомогою компасу і лага, які відповідно дають покази напряму і швидкості. При автономному счисленні автопрокладач або одограф, з’єднаний з датчиком компасу і лагу, неперервно веде прокладання руху судна. Похибки счислення визначаються похибками датчиків компасу і лага. Слід зазначити, що лаг вимірює швидкість і шлях судна тільки відносно води, а врахування впливу течій і дрейфу виконують поправками, які не відповідають фактичній ситуації. Похибка визначення положення місця судна складає від 0,3 до 55 км за добу. Метод розрахунку шляху базується на визначенні лінії положення шляхом неперервного інтегрування по часу вимірюваних прискорень або швидкості судна. Для цього необхідно мати дані про напрям руху судна і координати початкової або кінцевої точки шляху. Практичне застосування цього методу пов’язано з обмеженнями: недостатня точність вимірювальних приладів та залежність від гідрометеорологічних умов. Найбільш розповсюдженими навігаційними приладами, за допомогою яких реалізується цей метод, є магнітні компаси, гірокомпаси, гідродинамічні лаги, ехолоти, секстанти і оптичні пеленгатори. На даний час існує велике число різних типів перелічених приладів удосконалених модифікацій. Крім цього, появились автономні засоби навігації. Для визначення напрямів на морі служать компаси або у високих широтах гіроазимути. В даний час на суднах використовують магнітні та гіроскопічні компаси. Магнітний компас – основний навігаційний прилад, який встановлюють на всіх морських суднах: головний, шляховий і запасний. Головний компас встановлюють на верхньому містку в діаметральній площині судна, шляховий – в рубці перед кермом, запасний – на кормі біля аварійного керма приводу. З метою контролю всі компаси порівнюють із головним. Найбільш розповсюдженим серед магнітних компасів є тип УКП-М. На базі вказаного компаса створено компас КМО-Т – компас морський оптичний для транспортних суден і компас "Сектор".
Гіроскопічний компас базується на відомих властивостях гіроскопа – швидко обертального масивного ротора. Якщо центр ваги гіроскопа співпадає з точкою його підвісу, тоді його вісь намагається зберігати незмінний напрям у просторі. Ця властивість використовується в гіроазимутах – приладах, які зберігають встановлений напрям з технічно можливою точністю. Якщо центр ваги гіроскопа розміщений нижче точки підвісу, тоді появляється маятниковий момент завдяки обертанню Землі, під дією якого вісь гіроскопа прецесує до меридіану та здійснює навколо нього незатухаючі коливання. Використання різних типів заспокоювачів коливань дає можливість добиватися їх затухання. Отже, гіроскоп перетворюється в гірокомпас, вісь якого зберігає горизонтальне положення по напряму меридіану. Сам гірокомпас представляє собою складний електронавігаційний прилад. Найбільш розповсюдженим на суднах є гірокомпас типу "Курс", "Амур" тощо. Так, в комплекті гірокомпасу "Курс" є основний прилад масою 180 кг і біля сорока інших приладів загальною вагою біля 600 кг. В комплект гірокомпаса входить курсограф, репітер якого приводить в рух пера, які викреслюють на спеціально рівномірно рухомій стрічці графік зміни курсу судна у функції часу. Репітер гірокомпаса представляє собою пристрій зі скляною покришкою, під якою закріплена курсова мітка і обертається котушка з градусними поділками.
Його конструктивно включають в інші навігаційні прилади, які відіграють роль датчиків напряму. Магнітним і гіроскопічним компасам властиві свої переваги і недоліки. Магнітний компас – автономний прилад, простий, надійний, дешевий, завжди готовий до роботи, але точність його невисока і залежить від магнітних полів Землі і судна. Гіроскопічний компас – точний (на нього не впливає магнітне поле), надзвичайно складний, дорогий і не дуже надійний прилад, який залежить від суднового електроживлення і вимагає висококваліфікованої обслуги. Для приведення в робочий стан гірокомпас необхідно завчасно запустити. Слід зауважити, що при різкій зміні курсу або швидкості руху судна в ньому виникають змінні похибки, які важко врахувати. Це приводить до сумісного використання на суднах магнітних та гіроскопічних компасів, які доповнюють один одного. Це комплексне використання магнітного і гіроскопічного компасів дозволяє помітно підвищити точність і надійність системи в цілому. Для вимірювання швидкості і пройденої судном відстані використовують лаг. Лагом називають прилад, що вимірює швидкість ходу судна і (або) пройдену відстань. На даний час використовують лише відносні лаги, якими можна виміряти швидкість і пройдений шлях тільки відносно води. За принципом дії існуючі лаги ділять на віртуальні, гідродинамічні і індуктивні. Віртуальні лаги вимірюють пройдений шлях судна, який є пропорційний числу обертів підводної вертушки, обертання якої передається на лічильник пройденого шляху. Такі лаги мало використовуються бо мають низку точність
і надійність при малих швидкостях судна. Гідродинамічні лаги базуються на вимірюванні швидкісного напору зустрічного потоку води. Для цього під дно судна опускаються дві трубки: статичну з отвором внизу і динамічну з отвором попереду. Коли судно нерухоме при будь-якій осадці, тиск в двох трубках однаковий. При русі судна тиск у динамічній трубці підвищується пропорційно квадрату швидкості набігу потоку води. Тоді різниця тисків у трубках дозволяє виміряти швидкість судна, а відстань визначають інтегратором лічильника пройденого шляху, який градуйований на стандартні милі. Слід відзначити, що гідродинамічні лаги є складними, ненадійними, з низькою точністю вимірювань, особливо на малих швидкостях, приладами. Індуктивні лаги базуються на принципі електромагнітної індукції. Під дном судна електромагнітом створюється магнітне поле, через яке проходить зустрічний потік морської води, яка є хорошим електропровідником. За законом Фарадея електрорушійна сила пропорційна напруженості створюваного магнітного поля, довжині провідника (база між електродами під дном поперек судна) і швидкості провідника, тобто біжучого потоку води. Таким чином, вимірюється швидкість ходу судна, інтегрування якої по часу дає пройдений шлях. Сучасні типи індукційних лагів є дуже надійними і чутливими при роботі на будь-якій швидкості судна. Актуальною і невирішеною на даний час є проблема "абсолютного лага", коли говорять про вимірювання швидкості і пройденого шляху не відносно води, а відносно дна або берегів моря. Відомі декілька розв’язків цієї проблеми, але поки що ні одне з них не доведено до практичного використання. Принцип дії інерційних навігаційних систем полягає в наступному: на судні встановлюють дуже точні і чутливі вимірювачі прискорень – акселерометри. Перший інтеграл по часу від цих прискорень дає складові швидкості судна залежно від широти і довготи, а другий інтеграл – відповідно складові шляху. Неперервно вимірюючи прискорення і інтегруючи їх, можна отримати положення судна на даний момент часу відносно вихідної точки маршруту. Практичне здійснення цього методу визначення координат є дуже складним і важким, не зважаючи на простоту цього принципу. Акселерометри необхідно встановлювати на гідроплатформи, щоб вимірювати лише горизонтальні складові прискорень. Крім цього, самі акселерометри повинні мати високу точність і чутливість у широкому лінійному діапазоні вимірювань. Ці методи дають похибку визначення місцеположення судна до 18,5-55,5 км за добу. Доплерівські гідроакустичні лаги дають можливість вимірювати швидкість судна відносно ґрунту. Для цього при русі судна використовується доплерівське зміщення частоти відбитих від морського дна акустичних
сигналів. Під дном судна закріплюється система вібраторів, які випромінюють вузько направлені пучки акустичних хвиль вздовж і в поперечному напрямі
руху рухомого об’єкта. Ці акустичні коливання відбиваються від нерівностей морського дна, повертаються до судна і приймаються другою системою вібраторів. Отже, вимірюючи доплерівське зміщення частоти можна отримати поздовжню і поперечну складові швидкості судна відносно дна. Перший інтеграл по часу від цих швидкостей дає істинний шлях судна. Неперервно вимірюючи і інтегруючи ці швидкості, знаходять місцеположення судна відносно вихідної точки. Точність вимірювання швидкості судна доплерівськими лагами складає до 0,1% швидкості або до 0,01 вузла, а точність визначення місцеположення судна – 0,1-1,0% пройденого шляху. Різні типи доплерівських гідроакустичних лагів відрізняються між собою кількістю і розміщенням вібраторів, а також робочою частотою акустичних коливань від 3 до 500 кГц. На більш низьких частотах досягається збільшення глибини моря, але в цих випадках зростає маса і габарити випромінювача.
ЗАДАЧІ МОРСЬКОГО ТОПОГРАФІЧНОГО ЗНІМАННЯ.
МЕТОДИ ТОПОГРАФІЧНОГО ЗНІМАННЯ АКВАТОРІЙ.
Задачі морського топографічного знімання
Востанні роки в основному в США досягнуті великі успіхи в області удосконалювання
ірозробки нових засобів і методів космічної геодезії й океанографії, використання їх для визначення параметрів фігури і гравітаційного поля Землі, створення космічних геодезичних мереж, а також дослідження ряду геодинамічних і океанологічних явищ. Отримані результати дозволили уточнити систему фундаментальних геодезичних постійних і вийти на точності,
достатні для вивчення геодинамічних ефектів. У цьому зв'язку методи космічної геодезії в даний час відіграють значну роль у геофізиці і океанографії. Характерним для сучасного періоду є те, що практично будь-які шляхи подальшого розвитку космічної геодезії зв'язуються при аналізі, постановці і розробці з рішенням усе більш широкого кола прикладних задач, прикладом яких є вивчення динаміки твердої Землі й океанів. До неї відноситься і вивчення морської топографічної поверхні (МТП).
Усе більш гостро ставиться задача одночасного високоточного вивчення тонкої структури гравітаційного поля, а також використання космічних засобів для уточнення даних про динаміку океану і високоточне визначення нахилів МТП, тобто ставиться задача детального високоточного цифрового картографування різних трансформант гравітаційного поля і морської топографічної поверхні. Рішення настільки складної задачі може бути виконано лише шляхом проведення довгострокових комплексних досліджень геодезистів і океанологів із залученням сучасних технічних засобів і методів. Основними з них є супутникові альтиметрія, градієнтометрія і використання міжсупутникових вимірів. Усі вони нині інтенсивно розвиваються, як у частині пошуку і створення нових технічних засобів, так і
урозробці більш сучасних методів обробки результатів вимірів.
Вданий час помилки висот геоїда, отримані на морі з використанням гравіметричних, супутникових динамічних і альтиметричних даних складають 1,5 м. Цю величину порівнюють із відхиленнями МТП від геоїда. Донедавна МТП не приймалася до уваги при вивченні фігури геоїда Світового океану. Це виправдувало себе на початковому етапі використання даних супутникової альтиметрії при моделюванні гравітаційного поля Землі, але в даний час і в майбутньому при вже досягнутих точностях супутникових вимірів врахування нерівневості МТП стає необхідним. Сьогодні й у найближчому майбутньому супутникова альтиметрія буде залишатися найбільш важливим джерелом інформації для детального моделювання гравітаційного поля, навіть при передбачуваній реалізації на початку 90-х років програм вивчення гравітаційного поля з використанням систем спостереження «супутниксупутник» і супутникової градієнтометрії.
Усе це ставить проблему вивчення МТП в інтересах рішення геодезичних задач на перший план, як цільову задачу без рішення якої неможливий подальший прогрес у підвищенні точності визначення параметрів гравітаційного поля. З появою нових засобів вимірів стала реальною задача визначення просторових координат точок на поверхні Землі з точністю ~10 мм. У протиріччя з цим вступає точність порядку 1,5 м установлення світової системи висот, заснованої на середньому рівні моря. У той же час обґрунтована необхідність одержання висот геоїда на морі для цілей геодинаміки, океанографії і геодезії з помилками, рівними 10 мм. Для досягнення цієї точності необхідно насамперед враховувати топографію морської поверхні і варіації її в часі. Знання топографії необхідно так само при віднесенні нівелірних мереж до середнього рівня моря, як єдиної відлікової поверхні при встановленні національних і міжнародних нулів висот.
На думку багатьох вчених старе поняття «геоїд» не є універсальним, що викликає певні труднощі в океанографії, зокрема, при вивченні припливів і миттєвого стану поверхні океану в глобальному, локальному і регіональному масштабах. Ці труднощі полягають насамперед у встановленні системи відносності для відліку висот.
В результаті констатується:
1)не існує в принципі універсального визначення поняття «геоїд»;
2)для цілей сучасної високоточної геодезії слід використовувати квазігеоїд за Молоденським, а в океанографії застосовувати класичне поняття геоїда, як рівневої поверхні потенціалу сили ваги (поверхні незбуреного океану).
Загальновизнаний термін топографія морської поверхні розуміється як відхилення середнього рівня морської поверхні (СРМП) від геоїда, що еквівалентно тому, що деяка еквіпотенціальна поверхня в цьому випадку приймається як відлікова в глобальній системі висот. У цьому змісті МТП залежить від СРМП, що є функцією часу, у зв'язку з чим питання про вибір середнього рівня повинно зважуватися диференційовано в залежності від характеру розв'язуваних задач. Останнє у свою чергу засновано на гідростатичному рівнянні, що зв'язує гравітаційне поле Землі з полем гідростатичного тиску. Інтегрування цього рівняння від поверхні до деякого рівня рівних тисків дає величину, названу динамічною висотою, виражену в одиницях потенціалу. У той же час такі обчислення вимагають знання розподілу щільності по вертикалі, яке можна визначити за вимірюваннями солоності і температури на різних шарах води. Таким чином, в океанографічній практиці рівень задається щодо нульової динамічної поверхні, що лише теоретично збігається з еквіпотенціальною. Супутникові методи спостережень вимагають застосування глобальної системи відлікових еквіпотенціальних поверхонь, обумовлених полем сили ваги. У цьому і складається відоме розходження в підходах до систем відліку між геодезистами й океанологами.
До програм і проектів досліджень, пов'язаним з вивченням морської топографічної поверхні відносяться практично всі геодезичні програми, спрямовані на вивчення фігури геоїда і параметрів гравітаційного поля Землі; океанографічні програми, що передбачають використання супутників з радіовисотомірами, виміру з супутників і суден у Світовому океані; геодинамічні програми, спрямовані на комплексне вивчення геопотенціальних полів, динаміки земної кори й океанів; комплексні програми, спрямовані на вивчення динаміки океану, клімату і глобальної атмосфери. До геодезичних програм можуть бути віднесені американські і європейські програми, зв'язані з розробкою і створенням супутникових систем із градієнтометрами і лініями супутник-супутник ОКМ, ОКЕМ, 800М та ін.
До океанографічних програм відносяться проекти ТОРЕХ із цільовим призначенням вивчення динаміки океанів і припливів. До геодинамічних програм – комплексна геодинамічна програма МАЗА.
Морське топографічне знімання виконують з метою отримання топографо-геодезичної інформації для дослідницьких і практичних картографо-геодезичних робіт на акваторіях. В результаті виконання прибережними державами знімальних робіт в шельфових зонах ними видаються морські топографічні карти – топографічні карти шельфу (ТКШ). Основні елементи змісту ТКШ формуються за тими самими принципами картографічного моделювання, що і зміст топографічних карт суші (ТКС). Ця обставина покладена в основу твердження, відповідно до якого ТКШ є продовженням ТКС. Аналогічні морські карти видаються в США, Великобританії, Канаді, Японії, Франції, Норвегії й іншим країнах, що називаються як батиметричні, топографо-батиметричні, гідрографічні чи океанографічні. Але перераховані карти є тематичними, у той час, як ТКШ відносяться до групи карт загальногеографічного призначення. З цього погляду термін «топографічна карта шельфу», запропонований Л. М.
Гольдманом, більш вірогідно відповідає характеру, призначенню і специфіці. Однак більш вдалим був би термін «топографічна карта акваторії», як альтернативний терміну «топографічна карта».
Топографічні карти акваторій, на яких рельєф поверхні океанічної літосфери є основним елементом змісту, є необхідним вихідним матеріалом для вирішення різноманітних наукових і практичних задач. Основною науковою є задача з'ясування механізму утворення, еволюції і загальних рис геологічної будови системи Світового океану. Серед практичних найважливішою є задача виявлення закономірностей утворення та розподілу на поверхні і у надрах дна океанів родовищ мінеральної сировини. Топографічні карти та інші морські картографічні матеріали використовуються також у загальногеографічних цілях; як обґрунтування при рішенні приватних наукових і практичних задач геології, геофізики, гірничодобувної промисловості; для забезпечення заходів щодо господарського освоєння прибережної зони, охорони природи і навколишнього середовища, спорудженню підвідних агрегатів і комунікацій, раціональному використанню водних ресурсів, організації господарств аквакультури і рибного промислу; як основа для створення морських галузевих і навігаційних карт; як основу проектування і показу результатів робіт по делімітації і демаркації юрисдикційних і державних кордонів.
Методи топографічного знімання акваторій
Технічні засоби знімальних робіт.
В задачу знімання входить одержання в необхідному обсязі із заданою точністю масиву кількісних і якісних даних для побудови кондиційної топографічної карти чи іншої картографічної моделі акваторії, що знімається. Кількісні дані характеризують рельєф морського дна, планове і висотне положення інженерних споруд і комунікацій, положення границь морських просторів і зон, поширення донних відкладень (ґрунтів), рослинності, гідрофізичні параметри. У якісному відношенні характеризуються літологічні особливості ґрунтів, ландшафтно-екологічний стан району, поширення донних організмів, види водної рослинності, тощо.
У комплексі заходів щодо топографічної знімання акваторій виділяють як етапи підготовчі роботи, цикл знімальних морських робіт і обробку вимірів (матеріалів). Остання, звичайно, завершується оформленням знімального оригіналу карти чи плану. Основні специфічні ознаки, за якими усі можливі технології топографічної знімання акваторій істотно відрізняються від технологій топографічної знімання суші, властиві другому з відзначених етапів, тобто знімальним роботам, що виконуються безпосередньо на акваторії. Такі ознаки обумовлені, з однієї сторони набагато менш сприятливими, у порівнянні із сухопутними, фізико-географічними умовами робіт, нестаціонарністю водних мас по всій їхній товщі, особливістю електрофізичних властивостей води (непрозорістю її для більшої частини спектра електромагнітних хвиль), неможливістю візуального огляду об'єктів, що знімаються, і, як правило, набагато більш високими, ніж до ТКС, вимогами до інформативності топографічних карт, створюваних на акваторії, - з іншої сторони.
Тому недоцільно і неправомірно говорити про технологічні особливості морських зйомок, зіставляючи їх з аналогічними роботами на суші. По змісту і методам виконання це, практично, різні процеси, об'єднані, однак, в одне ціле тотожністю мети і розв'язуваної задачі.
Висотне знімання конкретної ділянки шельфу, в залежності від поставлених задач, фізико-географічних та кліматичних умов району, а також складності рельєфу дна з врахуванням сучасних засобів, може виконуватися наступними методами:
1)безперервним виміром глибин уздовж однієї або декількох ліній руху носіїв ехолотної апаратури, в даному випадку йдеться про отримання безперервних профілів дна;
2)безперервним зондуванням глибин у визначеній смузі уздовж маршруту судна – отримання зображення рельєфу по площині;
3)дискретним виміром глибин уздовж лінії руху судна на воді або транспортного засобу на льоду.
У підготовчі роботи входить:
-підготовка складу експедиції;
-обчислювальні і графічні роботи;
-підготовка технічних засобів;
-рекогностування району знімання;
-підготовка геодезичної основи.
Для виконання названих робіт необхідно розробити технічний проект і технічне обґрунтування для топографічного знімання. Вихідні дані для виконання знімальних робіт отримують з вивчення та аналізу картографічних і описових матеріалів, а саме: - існуючих топографічних карт на район робіт; - морських і лоцманських навігаційних карт; - каталогів координат і висот пунктів; - матеріалів маршрутного аерофотознімання; - матеріалів гідрологічної вивченості; - фізико-географічних і геоморфологічних описів і карт.
При складанні технічного проекту необхідно керуватися діючими інструктивними матеріалами проектування топографо-геодезичних робіт. Наступним етапом підготовчого періоду є складання основних робочих документів стосовно виконаних знімальних робіт: - робочий проект; - робочі планшети; - формуляри карт, картографічні і бланкові матеріали; - виписки з каталогів координат і висот геодезичних пунктів, описи розміщення реперів в районі знімання; - аерознимки берегової зони; - виписки вихідних гідрологічних даних для визначення поправки ехолота; - фізико-географічні описи для морів з припливами.
Для виконаних знімальних робіт на акваторіях шельфу і внутрішніх водоймищ використовують спеціальні технічні засоби, які розташовують на борті рухомих суден, підводних апаратів і літаків. Ці технічні засоби необхідні для: - отримання інформації про рельєф дна і підводної ситуації;
- отримання інформації про склад і розподіл ґрунтів дна, донної рослинності і тварин; - отримання гідрологічних характеристик середовища вимірювань; - визначення місцеположення знімальних суден і підводних апаратів.
Технічні засоби для визначення координат на акваторіях шельфу і внутрішніх водоймищ включають радіогеодезичні віддалемірні радіонавігаційні різницево-віддалемірні системи, теодоліти різних типів, які дозволяють визначати напрями на рухоме судно, електронні тахеометри, які дозволяють визначати напрями та віддалі до рухомого судна одночасно.
Рекогностування району робіт проводять завчасно – до виконання знімальних робіт, з метою виявлення, встановлення або уточнення збереженості геодезичних пунктів і знаків; можливості використання їх для визначення місцеположення судна у морі при топографічному зніманні шельфу; наявності місць для встановлення берегових теодолітних постів; необхідності встановлення додаткових опорних пунктів; наявності і зберігання реперів нівелірної мережі; місця встановлення тимчасових рівневих постів; розміщення ближніх постів гідрометеорологічних станцій, які ведуть систематичні спостереження за коливаннями
рівня моря; характеру і категорії складності рельєфу дна. Результати рекогностування необхідно враховувати в робочому проекті планово-висотної основи.
Геодезичною основою топографо-геодезичних робіт на акваторії є пункти державної планової геодезичної мережі, які розміщені на березі і штучних об’єктах на акваторії; репери і марки державної нівелірної мережі; репери постійних рівневих постів, які прив’язані до державної нівелірної мережі. Щільність пунктів планово-висотної основи повинна забезпечувати задану точність визначення координат і висот.
Для оперативного контролю за рівномірністю покриття ділянки знімання галсами необхідно вести робочий планшет. На ньому або на спеціальній кальці наносять глибини або відмітки дна для рисовки рельєфу дна, а також наносять опорні пункти, рамки робочого планшету, точки визначення положення судна з їх, номерами, сітка ізоліній, ділянки для детального дослідження і недоступні для знімання та границі.
Масштаб робочого планшета повинен відповідати масштабу знімання. В окремих випадках, коли рельєф дна є складним, допускається складати робочі планшети в більш крупних масштабах. Робочі планшети виготовляють на жорсткій або м’якій основах, на пластику або на креслярському папері з внутрішніми рамками 50х50, 60х60, 70х70, 70х100 см.
Знімання рельєфу морського дна.
На даний час знімання морського дна і водного середовища виконують з надводних суден, підводних човнів, літаків, ШСЗ та іншої апаратури. Надводні судна є головними засобами для виконання знімальних робіт на шельфі. Найбільш розповсюдженими для знімання на шельфі є гідрографічні судна, які мають відносно невелику осадку, що дозволяє використовувати їх не тільки для глибоководних, але і на мілководних прибережних ділянках. Сучасні гідрографічні судна забезпечені радіонавігаційними або радіогеодезичними системами, які використовують для планової прив’язки знімальних робіт. Якість і ефективність морського топографічного знімання залежить від вибору радіонавігаційних або радіогеодезичних систем. Для цього враховують точність визначення місцеположення, віддаленість від берегових станцій, можливість роботи берегових станцій в автоматичному і автономному режимах тощо.
Найбільш розповсюдженою апаратурою для знімання морського дна є гідроакустична апаратура. Ехолоти дозволяють виконувати висотне знімання дна, вимірюючи глибини. Гідролокатори на відміну від ехолотів, які зондують водне середовище у вертикальному напрямі, дозволяють отримувати інформацію не тільки під днищем судна, але і навколо нього. Його можна використовувати для знімання контурів морського дна, виявлення різних предметів, обслідування міжгалсових площ. Гідролокатор як і ехолот працює за принципом випромінювання і прийому відбитих ультразвукових хвиль.
Якщо на топографічній карті шельфу необхідно відобразити структуру донного ґрунту і товщину осадочних порід, то цю інформацію можна отримати за допомогою низькочастотної гідроакустичної апаратури, яку називають геолокаторами.
Для вивчення окремих важливих ділянок морського дна почали використовувати лазерну апаратуру. Лазер представляє собою джерело світлових променів, які характеризуються високою монохроматичністю, когерентністю і інтенсивністю. Перевагою лазерів перед гідролокаторами є миттєва швидкість розповсюдження світлових променів, направленість випромінювання і велика здатність лазерного променя у порівнянні з ультразвуковим, що дає можливість отримувати телевізійні зображення дна та вивчати мікроформи рельєфу і проглядати ґрунт.
Топографічне знімання з надводних суден виконують з метою отримання інформації для складання морських топографічних карт. Це відомості про рельєф дна, характер ґрунту і стратифікації донних відкладань, рослинності, підводних об’єктів тощо. Така інформація повинна бути достовірною на момент виконання знімання. Інформацію про рельєф дна отримують вимірюванням глибин, температури, солоності та коливань ґрунту. Інформацію про ґрунт, рослинність і особливості підводного рельєфу отримують іншими методами.
Планове положення точок на морі при високоточних зніманнях здійснюється візуальними і радіотехнічними методами. Але найбільше застосування мають віддалемірні і різницево-віддалемірні радіогеодезичні системи. Як при використанні візуальних, так і при радіотехнічних методів планового визначення, на знімальному планшеті необхідно весь час вести прокладку шляху рухомого судна.
Залежно від виду вимірювального параметра на знімальному планшеті будують сітку ізоліній, що дозволяє прискорити і спростити процес визначення місцеположення судна. Місця встановлення берегових станцій вибирають так, щоб заданий район знімання найбільш повно покривався робочою зоною радіосистеми.
Знімання морського дна виконують методом профілювання, тобто безперервного вимірювання необхідних параметрів із знімального судна, яке переміщується по акваторії. Вибір напрямів знімальних профілів, а також відстаней між ними здійснюється з таким розрахунком, щоб з найбільшою ефективністю отримати дані про рельєф дна. Найбільш розповсюдженим є знімання за системою прямолінійних галсів, розміщених на однакових відстанях один від другого. Їх напрям повинен збігатись з напрямом найбільшої розчлененості рельєфу дна. Для виконання цієї вимоги необхідно розміщувати галси перпендикулярно до напряму горизонталей. Таке розміщення галсів виконують у прямих берегів з поступово понижуючим дном, а також в районах з вираженим нахилом дна. У випадках, коли відсутній виражений нахил дна, вибір напрямів галсів немає суттєвого значення і при знімальних роботах на шельфі допускається довільний напрям.
Крім паралельного розміщення галсів можна вимірювати глибини за радіальними, перехресними і зигзагоподібними галсами. Вибір відстаней між галсами і відстаней між глибинами, тобто детальності проміру, встановлюється з врахуванням різних факторів. Для цього треба враховувати особливості будови рельєфу дна, діапазон вимірюваних глибин, точність планового положення місця та вимірювання глибин.
Висотне знімання конкретної ділянки шельфу залежно від фізикогеографічних і кліматичних умов району, а також складності рельєфу виконують наступними методами:
1)неперервним вимірюванням глибин вздовж однієї або декількох ліній руху носіїв ехолотної апаратури, тобто шляхом отримання неперервних профілів дна;
2)неперервним зондуванням глибин в певній смузі маршруту судна, тобто отримання зображення рельєфу на площі;
3)дискретним вимірюванням глибин вздовж лінії руху судна на воді або транспортного засобу на воді.
При топографічному зніманні шельфу необхідно знімати контури характерних форм рельєфу підводних ландшафтів, ділянки з різним типом ґрунту і стратифікацією донних відкладань (виділення кам’яних і піщаних ділянок), а також ділянок з різною рослинністю. Зніманню підлягає також всі штучні підводні предмети і споруди. Контурне знімання і знімання підводних предметів ускладнюється наявністю водного середовища. Для виконання контурного знімання широко використовують гідролокатори бічного огляду і методи сейсмозондування.
Для різних потреб господарської діяльності на морі необхідні дані про характер донного ґрунту і його розповсюдження по площі. Обслідування донних ґрунтів проводять за допомогою спеціальних ґрунтодобуваючих приладів. Існують різні типи приладів, за допомогою яких беруть ґрунт з різної глибини при русі або стоянці судна як з поверхні дна, так і з товщин донних осадків. Такі прилади дають можливість добувати взірці відкладань корінних порід, ґрунтів тощо. Залежно від поставлених завдань збір взірців ґрунту здійснюється драгами, дночерпаками, стратометрами, ґрунтовими трубками.
При топографічному зніманні шельфу виконують збір даних про водну рослинність, яку відображають на картах. У водному середовищі зустрічаються дві форми рослинності: трав’яниста і водорослинна. На відміну від суші, де рослинність має значне розповсюдження за площею, підводна рослинність рідко опускається глибше 30-50 м. Дані про водну рослинність отримують шляхом взяття проб дночерпаком, драгою або тралом.
При виконанні топографічного знімання необхідно враховувати зміни фізичного стану водного середовища (температура, солоність), а також зміни висотного положення рівня моря. Ці дані отримують з гідрологічних спостережень і спостережень на берегових футштоках і мареографах.
Підводні судна і апарати, оснащені сучасним науковим обладнанням і технічними засобами, вирішують широке коло завдань: виконання геологогеофізичних досліджень континентального шельфу; здійснення комплексу науково-дослідних океанографічних робіт; виконання топографічного знімання шельфу. В 60-х роках 20 століття почались широкі наукові дослідження з використанням підводних апаратів, яких на даний час нараховують близько 200. Топографічне знімання шельфу з підводних суден і апаратів виконують такими самими засобами і методами, що і з надводних суден. Для вимірювання глибини по галсах служать ехолоти, але в цьому випадку необхідно визначати глибину заглиблення підводного апарату. Для знімання використовують гідролокатор бічного огляду. В багатьох випадках використовують спеціальну апаратуру і методику топографічного знімання.
Підводне топографічне знімання виконують на невеликих за площею ділянках, де використання інших видів знімання технічно неможливе. Це перш за все місця, які є небезпечними для мореплавства. Підводні топографогеодезичні роботи виконують також для забезпечення будівництва важливих підводних споруд і комунікацій, створення опорних підводних геодезичних мереж. Підводне топографічне знімання виконують на глибинах до 50 м в масштабах 1:2000 – 1:500.
Поле донного рельєфу – основний з елементів ситуації, що відтворюється на топографічних картах. На отримання інформації про його параметри у вигляді планових координат та висот окремих точок орієнтовані знімальні методи, що використовуються в роботах по топографічному картографуванню акваторій. Найбільш досконалими з них є методи проміру, площинного гідролокаційного знімання та дистанційного зондування.
Промір – це метод знімання донного рельєфу шляхом безпосереднього або посереднього виміру глибин на галсах, що покривають поверхню знімання регулярною сіткою. З метою отримання інформації про рельєф дна промірні виміри виконують в процесі переміщення знімальних суден у заданий пункт або на об’єкт робіт. Такі виміри називають маршрутним проміром. Результати вимірів, приведені до заданої рівневої поверхні, є висотною основою для представлення у необхідному вигляді або уточненні донного рельєфу на морських топографічних, навігаційних та інших картографічних матеріалах. На топографічних картах шельфу та внутрішніх водоймищ рельєф відображається горизонталями. Відстань між знімальними галсами є один з основних параметрів проміру. Докладність проміру

встановлюється з врахуванням загального характеру рельєфу, глибин, масштабу знімання, призначення картографічних документів та вимогами нормативних актів.
Ехолотним проміром називається метод гідрографічного знімання, що виконується з метою отримання інформації про глибини акваторій та відображення їх на морських навігаційних картах. При проведенні гідрографічних досліджень основний параметр ехолотного проміру – міжгалсову відстань, визначають на основі апріорних даних, виходячи із загального характеру донного рельєфу та середньої глибини району. На стадії проектування їх встановлюють на підставі даних з нормативних актів. При виявленні особливостей рельєфу донної поверхні в процесі проведення проміру галси згущують у тих місцях, де в цьому є необхідність. Тільки при виконанні проміру у відкритому морі згущення ставиться у залежність від очікуваної точності визначення планових координат носія. У відповідності з діючими нормативними матеріалами процес знімання донного рельєфу розглядається як основа комплексу робіт з топографічного картографування акваторій. Реалізація його передбачена методом проміру у сполученні з іншими знімальними методами. Знімальні роботи виконуються в масштабах 1:2000-1:50000. Для районів шельфу з глибинами більше 200 м допускається виконувати знімання в масштабі 1:100000. Конкретний масштаб знімання визначається виходячи з цільового призначення картографічних матеріалів, що будуть створюватися.
Практичні вимоги до докладності проміру в зоні шельфу та на внутрішніх водоймах диференціюються за ступенем горизонтальної і вертикальної розчленованості на різних глибинах та вимог щодо точності відображення рельєфу в заданому масштабі знімання, відображеної в табл. 8.1.
До рельєфу категорії І відносять нерозчленовані та слабо розчленовані рівнини, що характеризуються середніми значеннями відносної глибини урізок підводних долин до 3 і 10 м відповідно. Рельєф категорії ІІ – це розчленовані рівнини з відносною глибиною урізок 1050 м. Рельєф ІІІ категорії характерний для сильно розчленованих рівнин із відносною глибиною урізок більше 50 м. Максимально допустима відстань між галсами – 2 см у масштабі карти, мінімальна – 0,5 см.
Таблиця 8.1 Точність відображення рельєфу дна
Знімання донного рельєфу можна виконувати аерокосмічним методом. Цей метод оснований на використанні методів дистанційного зондування – сукупності методів вивчення об’єкту за допомогою пристроїв, віддалених від нього на деяку віддаль. При проведенні аерокосмічного знімання застосовують традиційну геодезичну аерофотоапаратуру, спеціальну лазерну техніку – лазерні глибиноміри та зонди, а також створені на їх основі знімальні комплекси. Процес дистанційного зондування при топографічному зніманні акваторій реалізується на принципі світлової локації сигналом зондування із довжиною хвилі500 нм. У цій частині видимого світла, при розповсюдженні його у воді, мають місце найменші енергетичні втрати, отже – найбільша дальність дії відповідної апаратури.
Проведення топографічного знімання глибоководних областей Світового океану диктується необхідністю дослідження та засвоєння різного роду родовищ на глибинах 40006000 м. На таких глибинах найбільш ефективним та надійним вважається проведення знімальних робіт за допомогою буксируваних або автономних підводних апаратів, споряджених фототелевізійними і гідроакустичними засобами.
Знімання ґрунтів і підводних комунікацій.
Ґрунтова зйомка – складова частина топографічного знімання акваторій. Вона виконується з метою відображення на топографічних картах літологічного типу, майданного поширення та інших характеристик донних відкладень. У морських умовах гарантована надійність і безпека експлуатації промислових споруджень забезпечуються значно більш складними і дорогими методами, ніж на суші. Відповідно до цього і вимоги до вірогідності відображеної на морських картах геологічної ситуації значно підвищуються. У Великобританії, наприклад, жодне спорудження на шельфі не може бути зведене чи встановлене до одержання сертифіката, у якому детально відображається інформація про відповідність конструкції спорудження конкретним геологічним умовам. Збір необхідної геологічної інформації рекомендується робити шляхом добору донних проб і методом гідролокаційного обстеження за допомогою низькочастотних ехолотів і профілографів.
Одним із складних елементів комплексу робіт з топографічного знімання акваторій є виявлення і визначення місця розташування підводних трубопроводів, кабелів зв'язку, усть шпар, затонулих кораблів і інших об'єктів штучного походження. У різних ситуаціях для цих цілей використовуються. оптичні, фототелевізійні, гідроакустичні та електромагнітні методи. У деяких особливо складних випадках у процес такого знімання включають процедуру безпосереднього візуального обстеження за допомогою водолазів. Можливість застосування двох перших методів визначається прозорістю води в районі знімання. В даному випадку більш надійними виявляються засоби гідролокації і спеціальна апаратура електромагнітного зондування. До такої апаратури, зокрема, відноситься шукач підводних трубопроводів, що реалізує індукційний метод пошуку і виявлення. Прилад функціонує на глибинах до 10 м і забезпечує визначення планового і висотного положення дискретних точок трубопроводу з помилками до 2 м щодо носія.
Оптична стереосистема для перевірки стану підводних нафто- і газопроводів та бурових платформ створена у Великобританії. До складу системи входять:
1)підводний блок, що складається з двох 70-мм фотокамер з фокусною відстанню 38 мм, встановлених у водонепроникному корпусі з базисом 1,6 м, що дозволяє вести стереознімання об'єктів з відстаней 1,1 - 3,5 м, а також тест-об'єкта у виді алюмінієвого куба з безліччю відкаліброваних точок, куб фотографується перед зйомкою досліджуваного об'єкта і по завершенні її;
2)вимірювальний блок у складі стереокомпаратора, інтерфейсу, комп'ютера з периферійними пристроями;
3)програмне забезпечення з 8 стандартних програм. Система дозволяє робити знімання об'єктів на глибині до 140 м і забезпечує точність отримання даних близько 2 мм.
На сучасному етапі проведення топографічного знімання глибоководних областей Світового океану диктується необхідністю дослідження та освоєння полів залізомарганцевих конкрецій, а також родовищ інших твердих корисних копалин, розповсюджених в абиссалі на глибинах 4000-6000 м. На настільки значних глибинах найбільш ефективним і надійним з погляду ризику вважається проведення знімальних робіт за допомогою буксируваних чи
автономних підвідних апаратів, оснащених фототелевізійними і гідроакустичними засобами спостереження і реєстрації. Підвищена зацікавленість міжнародного співтовариства в якнайшвидшому рішенні проблеми освоєння ресурсів океану обумовили створення в найкоротший термін необхідних для цього технічних засобів і в першу чергу засобів пошуково-знімального призначення. У колишньому СРСР результатом робіт такого напрямку став глибоководний комплекс "МИР", створений на початку 80-х років. Комплекс призначений для проведення телевізійного знімання і фотографування морського дна в районах Світового океану з глибинами до 6000 м з метою вивчення топографічних і морфологічних особливостей поверхні дна, характеру донних відкладень, гідродинамічної обстановки в придонному шарі. Він складається з підводної частини і бортового устаткування, розташованого на судні. Підводна частина являє собою апаратносій з герметичними міцними боксами, в яких розташовані телевізійна камера, що працює в мало кадровому режимі розкладання, блок керування і формування відеосигналу, промірний ехолот, дві камери, що фотореєструють, система висвітлення і система електроживлення. Бортове устаткування включає пульт керування, перетворювач стандартів і відеоконтрольний пристрій. Буксирування комплексу здійснюється на відстані 3-10 м від поверхні дна. Фото- і телезйомка виконується безупинно на визначеній висоті камер над донною поверхнею, що задається оператором з пульта керування. Режим роботи теле- і фотокамер, імпульсного світильника і промірного ехолота, а також режим прийому-передачі інформації задає блок керування і формування. Інші технічні характеристики комплексу: оптимальна висота зйомки 6 м, час передачі і відтворення телевізійного кадру 1 с, режим фотозйомки одиночний і автоматичний, мінімальна дискретність експозиції 6 с, площа знімання з висоти 6 м – 18 м2, максимальний час роботи при одному спуску 20 годин, швидкість буксирування 2,5 вузла.
Для отримання і збору даних про тип донних відкладень, геологічних даних і топографії морського дна призначений комплекс геоакустичної апаратури "ГИК-6000". Комплекс виконаний на базі глибоководного акустичного профілографа і складається з набортного устаткування і підвідного буксируємого модуля. Набортне устаткування включає систему електроживлення, блоки керування і реєстрації. До складу підвідної частини входять антени акустичного профілографа, блок електроніки, розміщений в міцному корпусі. Основні технічні характеристики комплексу: частота випромінювання 100-120 кГц, ширина смуги зондування 250, 500 м на кожен борт, потужність випромінювання 0,5-5,0 кВт, що дозволяє досягати точності 0,5-5,0 м, робоча глибина до 6000 м, швидкість буксирування 1-3 вузли, реєстрація інформації в аналоговому виді на факсимільний апарат і в цифровому виді – на магнітний нагромаджувач.
Аерокосмічне знімання використовують як метод вивчення прибережних ділянок шельфу до глибин 10-15 м. цим методом можна також вивчати морські течії, хвилювання і яскравість моря. Але аерознімання шельфу застосовують в обмежених масштабах.
Опрацювання результатів топографічного знімання.
Опрацювання матеріалів знімальних робіт включає:
-перевірку і оцінку робочих матеріалів;
-опрацювання матеріалів визначення місцеположення знімального судна;
-опрацювання рівневих спостережень;
-опрацювання матеріалів вимірюваних глибин;
-опрацювання матеріалів гідролокаційного знімання;
-опрацювання матеріалів відбору проб ґрунту;
-складання і редагування знімальних оригіналів топографічної карти;
-складання технічного звіту.
Опрацювання матеріалів планової прив’язки знімального судна включає наступне: - перевірка, обчислення і врахування інструментальних поправок; - обчислення координат знімальних точок; - нанесення знімальних точок на знімальний орігінал; - обчислення середніх квадратичних помилок нанесення точок на знімальний орігінал. Опрацювання матеріалів рівневих спостережень полягає у виправлені моментів відліку рівнів поправками годинника, за яким фіксується час спостережень і приведення всіх відліків висоти рівня до нуля поста. За виправленими відліками висот рівня будують графік коливання рівня моря. Далі необхідно перевірити стрічки мареографів, журнали спостережень, журнали нівелювання рівневих лат відносно берегових реперів. Абсолютні відмітки на рівневі пости, які розміщені на островах та інших недоступних для геометричного нівелювання пунктах, передаються методом водного нівелювання.
Основним вихідним матеріалом при опрацюванні глибин є ехограми. Опрацювання ехограм і телеграфічних стрічок виконують як для знімальних, так і для контрольних галсів. Цей вид робіт включає перевірку і розбиття ехограм, зняття відліків глибин та виправлення виміряних значень глибин. Вибрані на ехограмі глибини відраховують від верхнього краю нульової лінії до верхнього краю профілю дна. Відрахування глибини виконують за допомогою спеціальних палеток, що відповідають певному типу ехолота і діапазону вимірювання глибин. Якщо вимір глибин виконують ручним лотом або наметкою, тоді необхідно опрацювати журнал знімання, в якому обчислюють необхідні поправки і відмітки дна. Виміряні глибини виправляють загальною поправкою
де: 1 - поправка за зміну рівня,
2 - сумарна поправка ехолота або іншого приладу, за допомогою якого вимірювались глибини.
При визначені сумарної поправки часткові поправки обчислюють для глибин 0 – 10 м з точністю 0,01 м, а для глибин 10 – 500 м з точністю 0,1 м. Загальну поправку не враховують, якщо вона менше 0,1 м на ділянках з глибинами до 50 м і менше 0,5% від виміряної глибини для ділянок з глибинами більше 50 м.
Опрацювання матеріалів гідролокаційного знімання ділять на польове і камеральне. Польове опрацювання передбачає дешифрування гідролокаційних зображень і ведення робочих планшетів з прокладанням на них результатів вимірів.
При камеральному опрацюванні, залежно від виду знімання, виконують підготовку оригінала контурного навантаження карти або обчислення координат виявлених гідролокатором об’єктів. При дешифруванні гідролокаційних знимків враховують характерні особливості зображень рельєфу дна, ґрунтів, підводних комунікацій.
Первинна обробка матеріалів знімання ґрунтів і водної рослинності полягає в їх опису і нанесені точок відбору на знімальний оригінал карти. Такий опис проб ґрунту заносять в спеціальний журнал ґрунтів, в якому відмічають товщину шарів, тип ґрунту за механічним складом, консистенцію ґрунтів, пластичність і в’язкість, колір, тон і відтінки вологої проби, наявність в ґрунті водоростей. Результати визначення донного ґрунту і водного середовища наносять на знімальний оригінал карти.
Складання морських топографічних карт.
Знімальний оригінал топографічної карти шельфу і внутрішніх водоймищ представляє собою детальний оригінал первинного картографічного відображення інформації знімальних робіт. Він є результатом необхідного технологічного етапу складання карти і підготовлюють його в графічній або цифровій формі.
Знімальний оригінал відображає результати картографічної інтерпретації знімальних і вихідних даних. Тут використовуються також гідролокаційні знимки, знимки підводного фотографування та інші зображення об’єктів картографування.
За елементами змісту складений оригінал карти включає:
-опорні пункти, орієнтири;
-берегову лінію, береги, острови та їх ґрунти;
-гідрографію суходолу;
-населені пункти, промислові, сільськогосподарські і соціально-культурні об’єкти на суходолі;
-дорожню мережу і дорожні споруди;
-границі і огорожі;
-інженерно-технічні споруди, об’єкти морського господарства;
-фарватери, канали і рекомендовані шляхи;
-рельєф дна;
-донні ґрунти, елементи рослинності і тваринного світу;
-елементи гідрології;
-зведення про суміжні листи карти;
-оформлення рамок.
На кожен лист ведуть формуляр, в якому відображають всі технологічні процеси створення карти: - дані про картографічний матеріал з їх короткою характеристикою; - дані про геодезичну основу карти; - дані про топографо-геодезичні роботи: методи знімання рельєфу дна, гідрологічні спостереження, знімання ґрунту, знімання підводних комунікацій, характеристика матеріалів аерофотознімання і гідролокаційного знімання; - характеристики матеріалів геофізичних робіт на акваторії; - дані про планово-висотну основу аерознимків і дешифрування, топографічне знімання сухопутної частини трапеції; - дані про фотограмметричні роботи, складання і підготовка до видання карт, підготовка оригіналу до видання.
На знімальних оригіналах карт наносять прямокутну кілометрову сітку і границі трапеції
– внутрішня рамка карти. Рельєф дна відображається горизонталями і відмітками дна згідно умовних знаків. Зображення рельєфу доповнюють підписами горизонталей з характеристикою розмірів, відносних висот або глибин окремих форм рельєфу. Зображений рельєф морського дна повинен детально і наглядно передавати характер і ступень його розчленуватості, точно передавати місцеположення основних структурних форм, наглядно показувати морфологічні особливості різних типів рельєфу дна.
Топографічні карти озер і водосховищ мають свої особливості при їх складанні, але знаходяться у відповідності до змісту топографічних карт шельфу. Так, на картах озер і водосховищ крім абсолютних відміток дна підписують від 2 до 5 відміток глибин на дм2 площі карти. Ці відмітки підписують похиленим шрифтом, синім кольором, щоб вони характеризували найбільші глибини водоймища від прийнятого відлікового рівня і швидко оцінювали би батиметрію водоймища. Показуючи донну рослинність, виділяють ділянки заростання і заболочування водоймищ і ділянки розповсюдження донної рослинності. Елементи донної рослинності озер і водосховищ наносяться за матеріалами дешифрування аерознимків мілководних ділянок або за даними контурного знімання. На картах водосховищ детально показуються затоплені, наполовину затоплені і висихаючі споруди, ліси, кущі, вирубки та інші природні об’єкти
. Підготовка карт до видання здійснюється:
-гравіруванням за допомогою спеціального шару, який нанесений на прозорий пластик;
-викреслюванням на креслярському папері, який наклеєний на основу або безпосередньо на матовий пластик;
-комбінованим способом;
-монтажем діапозитивів на пластику.