

Усі книги і методички
.pdf1)достатньо висока точність вимірів та визначень;
2)забезпечення необхідної дальності дії;
3)можливість виконання вимірів як в статичному, так і динамічному режимах;
4)висока продуктивність та технологічна сумісність практично з усіма видами морських робіт;
5)безперервність функціонування та забезпечення контролю положення
йактивного керування судном;
6)висока ступінь автоматизації процесів вимірів;
7)надійність в роботі в різних кліматичних і метеорологічних умовах. Мають ці системи також високу дозвільну спроможність і можливість
організації каналів зв’язку з вузькими смужками пропускання у будь якому діапазоні радіочастот. Широкі можливості фазового зонда дозволяють виконувати виміри на робочих, трансформованих і комбінованих частотах, на частотах, утворених як різниця або сума двох робочих частот і на частотах модуляції.
При використанні фазових систем спостереження практично зводяться до фазових або частотних вимірів отриманих електромагнітних коливань. Віддаль у даному випадку визначається за формулою
S |
N |
, |
|
2 |
|||
|
|
де: - довжина хвилі електромагнітних коливань; N – число електромагнітних хвиль.
Фазові радіогеодезичні системи можуть бути когерентними і некогерентними. У когерентних системах використовується одне джерело коливань масштабної частоти, а частоти коливань станції, що відбиває, залежать від частот коливань станції, що задає. Частіше застосовуються некогерентні (гетеродинні) радіогеодезичні системи, у яких всі станції випромінюють електромагнітні коливання незалежно одна від іншої, що дає можливість використовувати принцип гетеродинирування і виконувати фазові виміри на низькій різницевій частоті.
Імпульсні системи використовуються для безпосередніх вимірів віддалей за часом проходження імпульсів електромагнітних хвиль в прямому й
зворотному напрямах уздовж лінії вимірів. Віддаль визначається за формулою
S 2t ,
де: v – швидкість розповсюдження електромагнітних коливань; t – час проходження імпульсів.
Імпульсним системам властива більша дальність дії, в той час як фазовим
– більш висока точність вимірів. Імпульсні радіогеодезичні системи застосовуються для виміру довгих (декілька сотень кілометрів) ліній і при
57
створенні дрібномасштабних карт. В цих системах станція з індикаторним пристроєм і прийомопередавачем розташовуються на рухомому об’єкті, а на кінцях вимірюваних ліній встановлюють дві станції відповідачі із прийомопередавачами.
Такими радіогеодезичними системами були РИМ (СРСР), Шоран і Хайран (США), що використовували ультракороткі хвилі метрової довжини. З виміряних сторін утворюють мережу трилатерації, одержуючи систему опорних пунктів для забезпечення зйомок дрібного масштабу. Такі зйомки дуже ефективні у важкодоступних малообжитих районах. Так, наприклад, системами Шоран і Хайран було виконано картографування великої території півночі Канади площею в 2000000 км2. Геодезичною основою служили сторони тріангуляції 1 класу і декілька спеціально визначених астрономічних азимутів.
Імпульсні системи виявилися також ефективними для зв’язку материків і островів. Ними були здійснені геодезичні зв’язки Скандинавії, Англії і Ісландії, північноамериканського і європейського материків, Малої Азії й Африки через о. Крит, Північної і Південної Америки через Великі і Малі Антильські острови і ряд інших.
Імпульсні системи з пасивною відповіддю застосовують у радіовисотомірах, а з активною відповіддю – у радіонавігації.
Імпульсно-фазові радіосистеми основані на вимірах як часових, так і фазових співвідношень електромагнітного поля.
За видом безпосередньо виміряного радіотехнічного параметра системи поділяють на часові, фазові, частотні, амплітудні та змішані. Деякі з перелічених класів, у свою чергу, розділяються на підкласи. Так, фазові системи за способом створення пари когерентних коливань, необхідних для проведення фазових вимірів, поділяють на когерентні та гетероїдні.
У когерентних системах на приймальні пристрої станцій по різних каналах або лініях зв’язку поступають коливання рівних частот. В цьому випадку для їх поділу застосовують прийом часової селекції сигналів. При часовій селекції робота передавальних станцій системи організується так, щоб коливання від різних станцій випромінювань поступали на вхід прийомоіндикатора в різні моменти часу. Фазові виміри при цьому виконують безпосередньо на робочих частотах. Альтернативою часовій селекції у когерентних системах є частотна селекція, де частоти сигналів, які одночасно поступають на вхід прийомоіндикаторної станції, знаходяться у цілочисельному співвідношенні. Для виконання фазових вимірів у даному випадку прийняті коливання перетворюються (трансформуються) до однієї частоти, яка називається частотою порівняння. Таким чином, когерентні системи поділяються на системи з часовою та частотною селекцією сигналів.
58
В гетероїдних системах фазові виміри виконуються на частотах биття, утворених як різниця двох близьких за значенням частот, кожна з яких випромінюється відповідною станцією системи.
За видом навігаційно-геодезичних параметрів системи розділяються на кутомірні, віддалемірні, різницеві, сумарні та змішані. Найбільш широко розповсюджені віддалемірні і різницеві радіогеодезичні та радіонавігаційні системи. У віддалемірних системах геометричними параметрами є віддалі або їх приростки. При визначеннях приростків віддалей віддалемірні системи називають радіолагами. У різницевих системах геометричними параметрами є різниці віддалей. Різницевими називають також системи, в яких вимірюють приростки різниць віддалей. Фазові системи такого типу називають фазовими зондами.
За геометричними властивостями сітки ізоліній радіогеодезичних і радіонавігаційних систем розділяють на пеленгаційні, колові, гіперболічні, еліптичні та змішані. До пеленгаційних відносяться системи, ізолінії у яких представлені у вигляді локсодромій або ліній рівних пеленгів. Ці системи в морських геодезичних роботах не застосовуються тому, що мають малу точність вимірів. До колових відносяться віддалемірні системи, в тому числі радіолаги, сітка ізоліній яких приймає вигляд кіл. До гіперболічних відносять системи, в тому числі фазові зонди, сітка ізоліній цих систем має вигляд гіпербол.
У радіотехнічних системах використовуються різні за діапазоном радіохвилі: наддовгі, довгі, середні, короткі та ультракороткі. При наявності даних про частоти випромінювання можна судити про такі важливі параметри, як дальність дії та точність вимірів. При цьому, слід мати на увазі, що дальність дії системи тим більша, чим нижче частота радіохвиль, а точність вимірів підвищується зі збільшенням частоти радіохвиль.
Наддовгохвильові системи мають дальність дії до 10 000 км та забезпечують точність визначення місцеположення з похибками 0,5-5 км. Робочі частоти таких систем знаходяться в межах 10-14 кГц. Системи, які працюють у даному діапазоні радіохвиль, називають системами глобального радіуса дії.
Довгохвильові системи мають дальність дії до 2500 км та забезпечують точність визначення місцеположення з похибками 0,1-1 км. Робочі частоти таких систем знаходяться в межах 80-130 кГц. Такі системи називають системами далекого радіуса дії.
Середньохвильові системи мають дальність дії до 500 км та забезпечують точність визначення місцеположення з похибками 20-100 м та рахуються як системи середнього радіуса дії. Саме в діапазоні середніх хвиль функціонує більша частина фазових гіперболічних та колових систем, робочі частоти яких
1,5-3 мГц.
59
Короткохвильові системи застосовуються в радіогедезичних системах, які за технічними характеристиками є близькими до систем середньохвильового діапазону.
Ультракороткохвильові системи в основному представлені коловими радіогедезичними системами, які функціонують як у фазовому, так і в імпульсному режимах. Дальність дії їх в основному обмежена умовами прямої видимості та не перевищує 60 км. В цілому ультракороткохвильові системи відносяться до систем близького радіуса дії. Точність визначення місцеположення такими системами характеризується похибками 3-5 м.
Вибір радіосистем, у першу чергу, визначає якість та ефективність морського топографічного знімання. При виборі систем виходять із вимог необхідної точності визначення місцеположення при заданій віддалі від берегових станцій. Необхідно також враховувати такі фактори як завадостійкість, можливість роботи берегових станцій в автономному й автоматичному режимах та комутацію їх з електронно-обчислювальною технікою.
4.2. Фізичні принципи радіогеодезичних систем
Розглянемо фізичні принципи вимірів навігаційно-геодезичних параметрів, що використовуються у радіогеодезичних і радіонавігаційних системах. Для спрощення міркувань припустимо, що радіохвилі на лініях зв’язку поширюються в однорідному середовищі по прямолінійних траєкторіях із постійною кінцевою швидкістю V.
Представимо сигнал, що пройшов лінію зв’язку s гармонічною функцією
b(t) a cos(wt w 0 ), |
(4.4) |
де: а – амплітуда;
w = 2πf – частота;
τ = s/v - часова затримка сигналу на трасі s; wτ – фазова затримка.
Названі величини називають радіотехнічними параметрами. Фізичну сутність процесу визначення геометричної величини за допомогою радіогеодезичних і радіонавігаційних систем складає вимір одного чи декількох із перерахованих параметрів. Приймаючи сигнал (4.4) і оцінюючи деякий його параметр, можна визначити функціонально зв’язане з ним значення шуканої геометричної величини – навігаційно-геодезичного параметру, а в остаточному підсумку і місцеположення судна. Відповідно до виду радіотехнічного параметра, покладеного в основу роботи системи, у радіогеодезичних і радіонавігаційних системах можуть бути реалізовані амплітудний, часовий, фазовий і частотний методи вимірів геометричних величин.
60

Амплітудний метод ґрунтується на використанні залежності амплітуди прийнятих сигналів від напрямку на джерело. Цей метод може бути застосований тільки для визначення напрямків (пеленгів), тому в радіогеодезичних і в радіонавігаційних системах він застосування не знаходить. У той же час широко поширені амплітудні радіопеленгатори - засоби, призначені винятково для рішення задач навігації.
Часові методи виміру навігаційно-геодезичних параметрів реалізуються в радіогеодезичних і радіонавігаційних системах, у яких передавачі станцій випромінюють коливання дискретно – у вигляді імпульсів. Принцип дії таких систем ґрунтується на залежності результату виміру часу поширення радіохвиль по лінії зв’язку. У цьому випадку безпосередньо вимірюваним радіотехнічним параметром є час t, а формула для оцінки шуканого геометричного параметра представляється у вигляді
S t,
(4.5)
У випадках, коли за допомогою радіогеодезичних чи радіонавігаційних систем вимірюється подвійне значення S (у прямому й зворотному напрямках), формула для обчислення результату виміру приймає вигляд
S |
t |
, |
|
2 |
|||
|
|
(4.6)
Реалізація часового методу можлива також на основі вимірювання різниці τ = τ1 – τ2 часових затримок τ1 і τ2 радіосигналів, що надійшли в один приймач від двох рознесених у просторі джерел. Можливе використання і другого варіанта цього способу: вимірювання часових затримок сигналів, прийнятих двома приймачами від одного джерела. В обох випадках отримане значення τ
дозволяє судити про різницю |
s довжин ліній зв’язку s1 і s2 |
||||||||
s s |
s |
2 |
t |
t |
2 |
(t |
t |
2 |
). |
1 |
|
1 |
|
1 |
|
|
|||
Часовий метод вимірів покладений в основу принципу дії ряду вітчизняних і закордонних радіогеодезичних і радіонавігаційних систем.
Фазові методи вимірів навігаційно-геодезичних параметрів були розроблені і вперше здійснені в СРСР під керівництвом Л.Мандельштама, Н.Папалексі й Е.Щеголева. Вони використовуються як у системах, передавачі яких випромінюють безперервні коливання, так і в системах, передавачі яких випромінюють коливання у вигляді визначеної послідовності імпульсів. Принцип фазового методу ґрунтується на непрямому – за допомогою фазових вимірів, вимірі тих же величин t, 2t чи t. При цьому, безпосередньо вимірюваними радіотехнічними параметрами є відповідно фазова затримка wt сигналу на лінії зв’язку, подвоєна фазова затримка 2wt, що здобувається сигналом при проходженні однієї лінії зв’язку в прямому й зворотному напрямках, і різниця фазових затримок w t = wt1 – wt2 = w(t1 – t2) двох сигналів, що пройшли дві різні лінії зв’язку. В усіх випадках для виконання
61
фазових вимірів необхідна наявність двох когерентних коливань. Пояснимо фізичну сутність кожного з них.
Приймемо, що на віддалі s від берегової до суднової станції фазова затримка φs коливання частоти склала wt = ws/v. Якщо фазометричним пристроєм суднової станції виміряна величина φs, тоді при відомих значеннях w і v віддаль s визначиться за формулою
|
|
|
|
|
|
s s w |
s |
|
s |
|
. |
2 f |
2 |
||||
У такий спосіб реалізується фазовий віддалемірний метод визначення місця при наявності однобічного зв’язку між станціями системи. Фазові виміри в даному випадку полягають у вимірі різниці фаз коливання, що пройшло віддаль s, і коливання, виробленого опорним генератором суднової станції. Перше з них називають робочим (вимірюваним, сигнальним, інформативним), друге – опорним. Таким чином, опорний генератор суднової станції по суті є бортовим зберігачем початкової фази коливання, яке випромінюється передавачем берегової станції. Тому робота берегового й суднового генераторів повинна бути строго синхронізована. Створення систем із принципом дії, заснованим на вимірі віддалі з однобічним зв’язком між станціями, виявилася можливою тільки з появою високостабільних атомних генераторів – атомних стандартів частоти. Даний метод фазових вимірів є одним із найбільш перспективних для використання в радіогеодезичних і радіонавігаційних системах.
Основною перевагою фазового віддалемірного методу з бортовим зберігачем фази є можливість забезпечувати взаємодію берегової передавальної станції з будь-яким числом суднових приймачів. Основний недолік його – складність створення пари когерентних коливань.
Віддалемірний метод, заснований на вимірі подвоєної віддалі між судновою й береговою станціями, застосовується частіше. Безпосередньо вимірюваним радіотехнічним параметром у цьому методі є фазова затримка
φ2s = 2wτ = w2s/v, а віддаль s визначається за формулою
s 2s |
|
|
2s |
|
2s |
|
|
|
|
2 2 . |
|||
2w |
2 2 f |
|||||
Для реалізації даного методу в комплект берегової й суднової станцій додають прийомо-передавачами, що здійснюють двосторонній зв’язок. В апаратуру суднової станції вводиться фазометричний пристрій, що виконує фазові виміри. Вимір полягає в порівнянні фази сигнального коливання, що пройшло віддаль 2s, із фазою опорного коливання, що надходить у фазометр безпосередньо з генератора. Перевагою фазового віддалемірного методу вимірів із двостороннім зв’язком між станціями системи є простота створення пари когерентних коливань. Основний недолік – забезпечення взаємодії лише однієї суднової й однієї берегової станцій.
62
Найбільш розповсюдженим серед фазових методів є метод, заснований на вимірі параметра φ1,2 = w τ. Суть його полягає в тому, що передавач базисної станції 1 у момент часу t починає випромінювати коливання е1 = ε1coswt. Одночасно з ним передавач базисної станції 2 починає випромінювати коливання е2 = ε2coswt. На судновій станції ці коливання приймаються приймачем, налаштованим на частоту w, і далі подаються у фазометр, що вимірює різниця їхніх фаз
|
(wt w |
1 |
) (wt w |
2 |
). |
1,2 |
|
|
|
В даній формулі wτ1 і wτ2 – фазові затримки відповідних сигналів на віддалях s1 і s2. Оскільки τ = s/v, тому величина φ1,2 містить інформацію про різницю довжин ліній зв’язку між судновою і двома береговими базисними станціями. При реалізації різницевого фазового методу вимірів берегові станції повинні мати передавач, а рухома суднова станція – приймач випромінюваних коливань. Отже, один базисний комплект системи може обслужити будь-яке число рухомих станцій.
Частотні методи вимірів можуть бути реалізовані шляхом виміру співвідношення частоти відбитого сигналу і амплітудного значення частотно модульованого сигналу, шляхом формування частоти модуляції високочастотної несучої через вимірювану віддаль, а також на основі доплеровського ефекту. Перший з перерахованих методів у морських радіотехнічних системах не використовується. У той же час він знайшов застосування, наприклад, у радіовисотомірах малих висот.
Другий метод покладений в основу принципу дії деяких типів створюваних у даний час радіогеодезичних систем. Суть його полягає в тому, що опорний генератор суднової станції виробляє коливання частоти w, що подаються на передавач і випромінюються убік берегової станції. На береговій станції вони приймаються приймачем, налаштованим на частоту w, і перевипромінюються на суднову станцію. Прийняті приймачем суднової станції коливання подаються в детектор, у якому з них формується сигнал, що замикає ключ передавального тракту. У результаті випромінювання коливань судновою станцією припиняється на час 2t, необхідний для того, щоб коливання пройшли дистанцію 2s. Після закінчення часу 2t випромінювання коливань судновою станцією відновляється. Таким чином, цикл роботи описуваного пристрою складається з двох періодів по 2t кожен і в цілому складає 4t. Безпосередньо вимірюваним радіотехнічним параметром у розглянутій схемі є частота, що однозначно визначає геометричний параметр s. Для виміру частоти в комплект апаратури суднової станції вводиться частотомір.
Частотні методи вимірів геометричних параметрів, засновані на доплеровському ефекті, у морських радіотехнічних системах у даний час не застосовують. Однак функціональні схеми таких систем розроблені і поява їх
63
при проведенні морських геодезичних робіт |
справа найближчого |
майбутнього. |
|
4.3. Геометричні принципи радіогеодезичних систем
Визначення координат судна за допомогою радіогеодезичних і радіонавігаційних систем виконують шляхом виміру геометричних величин, які характеризують положення рухомої станції відносно наземних нерухомих. Такі величини називаються навігаційно-геодезичними або геометричними параметрами. В різних типах радіогеодезичних і радіонавігаційних систем геометричними параметрами можуть бути:
-кутові величини – азимути, пеленги, кути між напрямами з рухомого об’єкта на опорні пункти;
-віддалі (приріст віддалей) між рухомою і базисними станціями системи;
-різниці віддалей (приріст різниць віддалей) між рухомою та парою базисних станцій системи;
-суми віддалей (приріст сум віддалей) між рухомою та парою базисних станцій системи.
Виміряному значенню и будь-якого геометричного параметру Р на поверхні Землі відповідає лінія, яку називають ізолінією або лінією положення. В кожній точці ізолінії виконується умова и = const. Сукупності різних значень одного геометричного параметру відповідає сімейство ізоліній, які не перетинаються. Пара або більша кількість сімейств ізоліній, які відповідають різним значенням двох або більшої кількості геометричних параметрів, утворюють на місцевості сітку ізоліній. По суті в даному випадку утворюється криволінійна координатна сітка, геометричні властивості якої визначаються видом виміряних геометричних параметрів. Місцеположення судна при цьому знаходиться як точка перетину мінімум двох ізоліній, які належать різним сімействам в даній системі координат. Перетворення їх в іншу координатну систему можна здійснити графічно або аналітично. У практиці розв’язання задачі визначення місцеположення для спрощення алгоритмів обчислення координат об’єктів за виміряними геометричними параметрами користуються методом лінеаризації. Суть цього методу зводиться до апроксимації ізоліній дотичними до них в місці, де знаходиться судно.
У відповідності з видом виміряного геометричного параметру в радіогеодезичних і радіонавігаційних системах можуть бути реалізовані наступні методи визначення місця судна: кутомірний, віддалемірний, різницевий, сумарний, а також комбіновані методи: віддалемірно-різницевий, віддалемірно-кутомірний, різницево-сумарний. Для розв’язання задач морської геодезії і морської навігації найбільш часто використовують віддалемірний і різницевий методи.
64
При застосуванні кутомірного методу вимірюваними геометричними параметрами є кути, що вимірюються при опорних пунктах (рис. 10) чи при об’єкті визначень (рис. 11). Ізолінії положень представляють собою промені, що виходять з пункту вимірювань під кутом, який дорівнює виміряному в цьому пункті куту (рис. 10), чи кола, що опирається на опорний пункт (рис. 12), а кожна точка цього кола є вершиною виміряного кута. Положення судна в першому випадку визначається точкою перетину двох променів, в другому – точкою перетину двох кіл.
При застосуванні віддалемірного методу вимірюваними геометричними параметрами є віддалі r1 і r2 від судна до базисних станцій системи (рис. 12). Створені при цьому ізолінії представляють собою дві сім’ї концентричних кіл з центрами в точках розташування базисних станцій 1 і 2. Сітка ізоліній, в перетині яких визначається місця судна, утворюється парою цих сімейств. Ізолінію у вигляді кола називають ізостадією, а утворену ізостадіями сітку – стадіометричною.
При різницевому методі визначення місцеположення вимірюваними геометричними параметрами є різниці віддалей r3 – r1 і r3 – r2 (рис. 13). Утворені в даному випадку ізолінії представляють собою сім’ї софокусних гіпербол з фокусами в точках розташування пар базисних станцій 3 – 1 і 3 – 2. Положення судна визначається точкою перетину гіпербол, які належать різним сім’ям.
За геометричними властивостями сітки ізоліній радіогеодезичних і радіонавігаційних систем розділяють на пеленгаційні, колові, гіперболічні, еліптичні та змішані. До пеленгаційних відносяться системи, в яких ізолінії представлені у вигляді локсодромій або ліній рівних пеленгів. Ці системи в морських геодезичних роботах не застосовуються тому, що мають малу точність вимірів. До колових відносяться віддалемірні системи, сітка ізоліній у яких приймає вигляд кіл. До гіперболічних відносять системи, сітка ізоліній у яких має вигляд гіпербол.
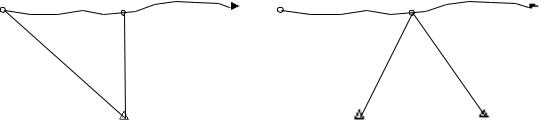
На відміну від віддалемірних вимірів на суходолі при виконанні морських геодезичних робіт вимірювання проводять до рухомого об’єкту, при цьому його положення необхідно знати в будь-який момент часу. У даному випадку існує два варіанти таких вимірювань (рис. 22).
O |
P |
|
O |
P |
|
A
Рис. 22. Спосіб радіолага
A |
B |
|
Спосіб фазового зонда
65

У першому варіанті, який називається способом радіолага, одна зі станцій розміщена на рухомому об’єкті Р. Ця станція випромінює радіохвилі і приймає їх після відбиття від станції, розміщеної на опорній точці А. Рухома станція починає рух від вихідної точки О і направляється на обумовлену, безперервно випромінюючи коливання і приймаючи від нерухомої станції відбиті і перетворені сигнали. При цьому на індикаторі рухомої станції безперервно фіксується різниця фаз φ між випромінюваним і відбитим сигналами і ведеться підрахунок числа повних фазових циклів за допомогою лічильників, самописів чи фоторегістраторів. Співвідношення між віддалю r між точками А і Р та величиною φ можна виразити як
2 r,
а між приростами δr віддалі і δφ різниці фаз буде
|
2 |
r. |
|
|
|||
|
|
Результати виміру відстаней способом радіолага не залежать від шляху, по якому рухається рухома станція. Для визначення її координат необхідно здійснити лінійну засічку не менш чим із двох вихідних пунктів. Тому в комплект такої системи звичайно входять дві станції, що відбивають, а на рухомій станції є два приймачі, кожний з яких налаштований на довжину хвилі однієї зі станцій, що відбивають, і два фазометри. Розрахунок координат може виконуватися аналітично або графічно по круговій сітці ліній положення, що наносяться на планшет (карту). Як було вказано раніше такі сітки називаються стадіометричними координатними сітками. Системи, що працюють способом радіолага, відносяться до віддалемірних (колових) систем. Точність визначення відстаней цими системами залежить від точності фіксації різниці фаз і в середньому складає 6 м. Спосіб радіолага широко використовується в морській і повітряній навігації для визначення відстаней до кораблів.
При застосуванні другого варіанту нерухомі станції А і В випромінюють коливання різних частот. Прийомна станція знаходиться на рухомому об’єкті Р
– її називають фазовим зондом. Ця станція приймає випромінювання станцій А і В. В даному способі вимірюються зміни або прирости різниць віддалей від фазового зонда (пункт Р) до кожної з нерухомих станцій А і В. Геометричним місцем різниці двох відстаней до вихідних точок є гіпербола з фокусами в цих точках. Системи, засновані на такому принципі, називаються гіперболічними. Різниця відстаней визначається за різницею фаз електромагнітних коливань станцій що задає і відбиває. Однак вимір однієї різниці відстаней дозволяє визначити тільки одну гіперболу, на якій знаходиться рухомий об’єкт. Щоб визначити її точне місце розташування, необхідно виміряти ще мінімум одну різницю відстаней до двох інших вихідних точок. Перетин двох гіпербол дає можливість визначити координати шуканої точки.
66