

Вращательного движений
Закон сохранения механической энергии: полная механическая энергия системы тел остается неизменной при любых движениях тел системы
![]()
Общефизический закон сохранения энергии: энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой.
§ 1.3 Основы релятивистской механики
Системы отсчета, в которых выполняется первый закон Ньютона, называются инерциальными.
Инерциальные системы- системы отсчета, относительно которых тела движутся с постоянной по модулю скоростью в отсутствии или компенсации внешних воздействий.
Специальная теория относительности (СТО) рассматривает явления, происходящие только в инерциальных системах отсчета.
СТО часто называется релятивистской теорией.
СТО предложена немецким физиком А.Эйнштейном (1905 г.) для согласования экспериментальных данных по измерению скорости света с теоретической базой классической (ньютоновской) механики.
Теория относительности базируется на двух постулатах. Справедливость постулатов доказывается тем, что следствия, вытекающие из постулатов, хорошо согласуются с результатами многочисленных экспериментов (например, движение элементарных частиц в ускорителях).
1 постулат (принцип относительности Эйнштейна) - при одних и тех же условиях все физические явления в любой инерциальной системе отсчета происходят совершенно одинаково.
Это значит, что никакими экспериментами (механическими, электромагнитными, оптическими и др.), поставленными внутри инерциальной системы, невозможно установить, покоится эта система или движется равномерно и прямолинейно.
Из данного постулата следует, что при переходе из одной инерциальной системы отсчета к другой математические выражения законов физики не должны изменяться.
2 постулат (принцип постоянства (инвариантности) скорости света) - скорость света в вакууме не зависит от скорости движения источников и приемников света и во всех инерциальных системах отсчета одинакова.
Из данного постулата следует, что взаимодействия между телами в природе не могут распространяться с бесконечно большой скоростью. Скорость света в вакууме является предельной скоростью передачи сигнала.
|
Следствия постулатов теории относительности | |||
|
относительность расстояний
|
➨
Сокращение длины тем больше, чем больше скорость движения. Поперечные размеры тела не зависят от скорости его движения и одинаковы во всех инерциальных системах отсчета. | ||
|
относительность промежутков времени
|
➨
➨ Длительность события, происходящего в некоторой точке, наименьшая в той инерциальной системе отсчета, относительно которой эта точка неподвижна. Таким образом, ход часов замедляется в системе отсчета, относительно которой часы движутся. | ||
|
релятивистский закон сложения скоростей
|
➨ ➨ точка
М движется
со скоростью
|
| |
|
Зависимость массы от скорости (релятивистская масса)
|
➨
➨
При
увеличении скорости тела его масса
| ||
|
Релятивистский импульс
|
➨ релятивистский импульс пропорционален вектору скорости.
| ||
|
Закон сохранения релятивистского импульса |
➨ релятивистский импульс замкнутой системы сохраняется, т.е. не изменяется с течением времени.
| ||
|
Основной закон релятивистской |
➨ вектор
результирующей силы
| ||
|
динамики |
| ||
|
Связь между массой и энергией
|
➨ полная энергия тела или системы тел равна произведению ее полной релятивистской массы на квадрат скорости света в вакууме. | ||
|
Энергия покоя
|
➨ энергия, которой обладает неподвижное тело; ➨ энергия покоя – это внутренняя энергия тела. | ||
|
Кинетическая энергия тела
|
➨ представляет
собой разность между полной энергией
тела
| ||






|
1.4 ЭЛЕМЕНТЫ МЕХАНИКИ ТВЕРДОГО ТЕЛА |
Момент инерции тела относительно оси – физическая величина, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси
![]()
Момент инерции тела при вращательном движении играет такую же роль, как масса при поступательном движении.
|
Теорема Штейнера (используется для определения момента инерции твердого тела относительно произвольной оси):
момент
инерции тела относительно любой оси
вращения равен моменту его инерции
|
С а С/
|
|
ния
а
между осями
| |

Кинетическая энергия вращающегося тела представляет собой алгебраическую сумму кинетических энергий отдельных его точек, т.е.
![]()
![]()
В
случае, если тело движется поступательно
со скоростью v
и одновременно вращается вокруг
некоторой оси с угловой скоростью
![]() (например, катящееся колесо), то полная
кинетическая энергия этого равна
(например, катящееся колесо), то полная
кинетическая энергия этого равна
![]()
Моменты инерции однородных тел правильной формы
|
Тонкое однородное кольцо R- радиус; М-масса
|
Рис.2
|
|
|
Круглая однородная пластинка - диск R- радиус; М-масса
|
Рис.3
|
|
|
Цилиндр R- радиус; М-масса
|
Рис.5
|
|
|
Кольцо R и r – соответствующие радиусы; М – масса кольца |
Рис.6
|
|
|
Стержень L- длина стержня; М – масса стержня
|
Рис.7
|
(ось проходит через конец стержня)
(ось проходит через центр стержня) |
|
§ 1.4 КОЛЕБАНИЯ И ВОЛНЫ | ||











Понятие о колебательных процессах. Гармонический
осциллятор.
Физическая система, совершающая колебания, называется осциллятором (лат. oscillo –качаюсь).
Гармонический осциллятор – осциллятор, совершающий гармонические колебания согласно уравнению:
![]() ,
(1)
,
(1)
решение которого имеет вид:
![]() (2)
(2)
![]() (3)
(3)
Классические осцилляторы – математический маятник, физический маятник.
|
|
Физический маятник – твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси О подвеса, не проходящей через центр масс С тела.
Если
маятник отклонен из положения равновесия
на некоторый угол
|


где J – момент инерции маятника относительно оси, проходящей через
точку О;
![]() -
расстояние между точкой подвеса и
центром масс маятника;
-
расстояние между точкой подвеса и
центром масс маятника;
![]() =-mgsin
=-mgsin![]()
![]() -mg
-mg![]() - возвращающая сила (знак минус обусловлен
тем, что направления
- возвращающая сила (знак минус обусловлен
тем, что направления
![]() и
и
![]() всегда противоположны;
всегда противоположны;
![]() соответствует малым колебаниям маятника,
т.е. малым отклонениям маятника из
положения равновесия).
соответствует малым колебаниям маятника,
т.е. малым отклонениям маятника из
положения равновесия).
Уравнение (4) можно записать в виде:
![]() или
или
![]()
Принимая
![]() ,
(5)
,
(5)
получим уравнение
![]() ,
,
решение которого имеет вид:
![]() (6)
(6)
Из
выражения (6) следует, что при малых
колебаниях физический маятник совершает
гармонические колебания с циклической
частотой
![]() и
периодом:
и
периодом:
![]() ,
(7)
,
(7)
где
![]() -приведенная
длина физического маятника,
т.е. длина такого математического
маятника, период колебаний которого
совпадает с периодом колебаний данного
физического маятника.
-приведенная
длина физического маятника,
т.е. длина такого математического
маятника, период колебаний которого
совпадает с периодом колебаний данного
физического маятника.
Точка
![]() на
продолжении прямойОС,
отстоящая от оси подвеса на расстоянии
приведенной длины L,
называется центром
качания
физического маятника.
на
продолжении прямойОС,
отстоящая от оси подвеса на расстоянии
приведенной длины L,
называется центром
качания
физического маятника.
Оборотный маятник – один из типов физического маятника.
Частным случаем физического является математический маятник, вся масса которого сосредоточена в одной точке – центре масс.
|
|
Математический маятник – идеализированная система, состоящая из материальной точки m, подвешенной на нерастяжимой, невесомой нити, и колеблющейся под действием силы тяжести. Период колебаний математического маятника:
Циклическая
частота:
|


|
|
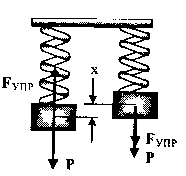
Пружинный
маятник
– груз массой m,
подвешенный на абсолютно упругой
пружине и совершающей гармонические
колебания под действием упругой силы
Период колебаний пружинного маятника:
Циклическая
частота:
| |
|
§ 1.5 ВИДЫ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И ИХ ХАРАКТЕРИСТИКИ |
| |

Амплитуда, период и частота колебаний
Колебаниями называются движения или процессы, которые характеризуются повторяемостью во времени.
В зависимости от физической природы колебательного процесса и «механизма» его возбуждения различают колебания: механические (например, колебания маятников, струн, качка корабля, волнения моря и т.п.); электромагнитные; электромеханические.
Простейшим типом колебаний являются гармонические колебания – колебания, при которых колеблющаяся величина изменяется со временем по закону синуса или косинуса:
![]()
![]() ,
(1)
,
(1)
где А – амплитуда - максимальное значение колеблющейся величины;
![]() -
фаза
колебаний
в момент времени t;
-
фаза
колебаний
в момент времени t;
![]() -
начальная фаза колебаний в момент
времени
t=0,
[φ]=рад;
-
начальная фаза колебаний в момент
времени
t=0,
[φ]=рад;
![]() -
круговая
(циклическая)
частота
– число полных колебаний, выраженных
в радианной (угловой) мере, за 1 секунду.
-
круговая
(циклическая)
частота
– число полных колебаний, выраженных
в радианной (угловой) мере, за 1 секунду.
![]()
![]()
Период
колебаний
– промежуток времени, за который
совершается одно полное колебание и
фаза колебания получает приращение
![]() :
:
![]()
![]()
Частота колебаний – число полных колебаний за 1 секунду (величина, обратная периоду колебаний):
![]()
![]() =
=![]()
Дифференциальное уравнение гармонических колебаний имеет вид:
![]() ,
(2)
,
(2)
решением этого уравнения является выражение вида (1).
Свободные затухающие колебания
Колебания называются свободными (собственными), если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на колебательную систему.

 Свободные
затухающие колебания
- колебания, амплитуда которых вследствие
потерь энергии реальной колебательной
системой с течением времени уменьшается.
Свободные
затухающие колебания
- колебания, амплитуда которых вследствие
потерь энергии реальной колебательной
системой с течением времени уменьшается.
Затухание свободных гармонических колебаний связано с убылью механической энергии колеблющейся системы за счет действия сил трения и других сил сопротивления.
Амплитуда затухающих колебаний убывает с течением времени по закону
![]() ,
(*)
,
(*)
где А0 – начальная амплитуда колебаний в момент времени t=0, определяемая начальным запасом полной энергии колеблющегося тела;
е – основание натурального логарифма;
![]() -
коэффициент
затухания,
характеризующий быстроту убывания
амплитуды, зависящий от сил трения и
массы колеблющегося тела.
-
коэффициент
затухания,
характеризующий быстроту убывания
амплитуды, зависящий от сил трения и
массы колеблющегося тела.
Убывание амплитуды затухающих колебаний по закону (*) наблюдается лишь при малых затуханиях.
Затухающие колебания представляют собой непериодические колебания, так как в них никогда не повторяются значения физических величин, характеризующих такие колебания (например, смещения, скорости и ускорения). Поэтому к затухающим колебаниям неприменимы понятия периода и частоты, введенные для периодических колебаний.
Условным периодом (периодом) Т затухающих колебаний называется промежуток времени между двумя последующими максимальными или минимальными значениями колеблющейся физической величины.
Период затухающих колебаний вычисляется по формуле:
![]() ,
,
где
![]() -
собственная частота свободных незатухающих
колебаний;
-
собственная частота свободных незатухающих
колебаний;
![]() -
коэффициент затухания.
-
коэффициент затухания.
Величина
![]() называетсяциклической
частотой
затухающих колебаний, которая показывает,
сколько раз за
называетсяциклической
частотой
затухающих колебаний, которая показывает,
сколько раз за
![]() секунд колеблющееся тело проходит через
положение равновесия.
секунд колеблющееся тело проходит через
положение равновесия.
При
условии
![]() затухающие колебания описываются
дифференциальным уравнением:
затухающие колебания описываются
дифференциальным уравнением:
![]() ,
,
решение которого имеет вид:
![]() ,
,
где
![]() - начальная фаза колебаний, определяемая
начальными условиями возникновения
колебаний.
- начальная фаза колебаний, определяемая
начальными условиями возникновения
колебаний.
|
На рисунке изображена зависимость S от t.
|
|


Характеристики затухания
Время релаксации
 - это время, за которое амплитуда
колебаний уменьшается ве
раз. Из
выражения
- это время, за которое амплитуда
колебаний уменьшается ве
раз. Из
выражения
 видно, что:
видно, что:
![]()
2) Логарифмический декремент затухания.
Если
![]() и
и
![]() -
амплитуды двух последовательных
колебаний, соответствующих моментам
времени, отличающихся на период, то
отношение
-
амплитуды двух последовательных
колебаний, соответствующих моментам
времени, отличающихся на период, то
отношение
![]()
называется декрементом затухания.
Логарифм декремента затухания называется логарифмическим декрементом затухания:
![]() ,
,
где
N
– число колебаний за время
![]() ,
в течение которого амплитуда уменьшается
ве раз.
,
в течение которого амплитуда уменьшается
ве раз.
Добротность.
Для характеристики колебательной системы пользуются понятием добротности Q, которая при малых значениях логарифмического декремента равна:
![]()
Вынужденные механические колебания
Свободные колебания реальной колебательной системы являются затухающими. Чтобы возбудить в такой системе незатухающие колебания, необходимо компенсировать потери энергии, обусловленные силами сопротивления (трения). Это можно осуществить, воздействуя на систему переменной внешней силой F(t).
Вынужденными колебаниями называются незатухающие колебания системы, которые вызываются действием на нее внешних сил F(t), периодически изменяющихся с течением времени.
Вынужденными являются колебания гребных винтов, лопаток и валов турбин под действием периодически изменяющихся внешних сил.
Сила F(t), вызывающая вынужденные колебания, называется вынуждающей силой.
Если вынуждающая сила F(t) изменяется гармонически по закону:
![]() ,
,
где
F0
– амплитуда
вынуждающей силы,
![]() - циклическая частота, то в системе, на
которую действует такая сила, могут
установиться вынужденные колебания,
которые являются также гармоническими,
происходят с циклической частотой,
равной частоте
- циклическая частота, то в системе, на
которую действует такая сила, могут
установиться вынужденные колебания,
которые являются также гармоническими,
происходят с циклической частотой,
равной частоте![]() вынуждающей силы, и описываются
дифференциальным уравнением:
вынуждающей силы, и описываются
дифференциальным уравнением:
![]() ,
,
решение которого имеет вид:
![]() ,
,
где
А
– амплитуда вынужденных колебаний
физической величины (например, смещения),
![]() -
разность фаз между вынужденными
колебаниямиS
и силой F(t).
-
разность фаз между вынужденными
колебаниямиS
и силой F(t).

 Например,
пружинный маятник, который подталкивается
вверх периодически, через определенное
время начнет колебаться с определенной
амплитудой. Вначале, в процессе
установления вынужденных колебаний,
как видно из рисунка, колебания носят
сложный характер. Происходит наложение
свободных затухающих колебаний и
вынужденных колебаний. После того, как
свободные
колебания прекратятся, останутся только
вынужденные колебания.
Например,
пружинный маятник, который подталкивается
вверх периодически, через определенное
время начнет колебаться с определенной
амплитудой. Вначале, в процессе
установления вынужденных колебаний,
как видно из рисунка, колебания носят
сложный характер. Происходит наложение
свободных затухающих колебаний и
вынужденных колебаний. После того, как
свободные
колебания прекратятся, останутся только
вынужденные колебания.
Амплитуда А установившихся вынужденных колебаний определяется по формуле:
![]() ,
,
где F0 – амплитуда вынуждающей силы,
m – масса колеблющейся системы,
![]() -
циклическая
частота свободных незатухающих колебаний
системы,
-
циклическая
частота свободных незатухающих колебаний
системы,
![]() -
циклическая частота внешней силы,
-
циклическая частота внешней силы,
![]() -
коэффициент затухания.
-
коэффициент затухания.
При
постоянных F0,
m
и
![]() амплитуда вынужденных колебаний зависит
от соотношения частот вынуждающей силы
(
амплитуда вынужденных колебаний зависит
от соотношения частот вынуждающей силы
(![]() )
и свободных незатухающих колебаний
(
)
и свободных незатухающих колебаний
(![]() ).
).
Явление
возрастания амплитуды вынужденных
колебаний при приближении циклической
частоты вынуждающей силы к значению
![]() называетсярезонансом.
называетсярезонансом.
![]() -
резонансная
амплитуда
-
резонансная
амплитуда
![]() -
резонансная
частота
-
резонансная
частота
Кривые
зависимости А
от
![]() называютсярезонансными
кривыми.
называютсярезонансными
кривыми.

 Форма
резонансных кривых зависит от величины
коэффициента затухания
Форма
резонансных кривых зависит от величины
коэффициента затухания
![]() ,
с увеличением которого резонансные
кривые становятся более пологими,
уменьшается «острота» кривых и значение
амплитуды
,
с увеличением которого резонансные
кривые становятся более пологими,
уменьшается «острота» кривых и значение
амплитуды![]() при
при![]() .
.
![]() Явление
резонанса используется в акустике –
для анализа звуков, их усиления. Под
действием периодически изменяющихся
нагрузок в машинах и различных сооружениях
могут возникнуть явления резонанса,
которые иногда бывают опасны для
эксплуатации машин.
Явление
резонанса используется в акустике –
для анализа звуков, их усиления. Под
действием периодически изменяющихся
нагрузок в машинах и различных сооружениях
могут возникнуть явления резонанса,
которые иногда бывают опасны для
эксплуатации машин.
|
§ 1.6 СЛОЖЕНИЕ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ |
Под сложением колебаний понимают нахождение закона результирующих колебаний системы в тех случаях, когда эта система одновременно участвует в нескольких колебательных процессах.
Различают два предельных случая:
1) сложение колебаний одинакового направления и одинаковой частоты;
2) сложение взаимно перпендикулярных колебаний.
Сложение двух одинаково направленных