

Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
«ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ» (ТУСУР)
Кафедра комплексной информационной безопасности электронновычислительных систем (КИБЭВС)
ИЗУЧЕНИЕ РАБОТЫ ТРИГГЕРОВ
Отчет по лабораторной работе №4 по дисциплине «Электроника и схемотехника 2»
Вариант №19
Студент гр.
Руководитель
Томск 2022
Введение
Цель работы – изучить основные типы триггеров, их принципы
построения и работы.
Постановка задачи:
1.Составить таблицы функционирования для схем согласно варианту.
2.Собрать заданные схемы триггеров.
3.Описать устройства с помощью HDL.
3. Промоделировать работу схем и проверить с таблицами
функционирования.
Задания по варианту:
-динамический триггер RS на базисе И-НЕ;
-статический двухступенчатый триггер T на базисе ИЛИ-НЕ;
-статический одноступенчатый триггер T на базисе И-НЕ.
2
1 ДИНАМИЧЕСКИЙ RS-ТРИГЕР В БАЗИСЕ И-НЕ
1.1 ТАБЛИЦА ФУНКЦИОНИРОВАНИЯ
Для триггеров с динамическим управлением можно менять информационные сигналы при любом уровне синхросигнала без проявления ошибки.
В таких схемах тактовый сигнал активен на коротком промежутке времени в окрестностях нарастающего или сдающего фронта тактового импульса.
Ниже приведена таблица 1.1, которая отражает функционирование динамического RS-триггера.
Таблица 1.1 – Таблица функционирования динамического RS-триггера
|
Входы |
|
|
Выходы |
Переход |
||
|
|
|
|
|
|
|
|
̅ |
|
̅ |
|
( ) |
|
( + 1) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
X |
1 |
|
0 → 1 |
0 |
|
0 |
0 → 0 |
|
|
|
|
|
|
|
|
1 |
X |
0 → 1 |
1 |
|
1 |
1 → 1 |
|
|
|
|
|
|
|
|
|
1 |
0 |
|
0 → 1 |
0 |
|
0 |
0 → 1 |
|
|
|
|
|
|
|
|
0 |
1 |
|
0 → 1 |
1 |
|
1 |
1 → 0 |
|
|
|
|
|
|
|
|
1.2 ФУНКЦИОНАЛЬНАЯ СХЕМА
На рисунке 1.1 представлена функциональная схема динамического
RS-триггера с базисным элементом И-НЕ.
3

Рисунок 1.1 – Функциональная схема динамического RS-триггера
1.3 ФОРМУЛА
На основе функциональной схемы составим формулы для выходов на основе базисного элемента И-НЕ:
|
|
̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
1( + 1) = ( ) 1( ) |
|
|
|
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
2( + 1) = ( ) 1( ) |
|
̅ |
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
1( + 2) = 1( + 1) ( + 1) 1( + 1) |
||
̅̅̅ |
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
1 |
( + 2) = 2( + 1) ( + 1) 1( + 1) |
|
|
( + 3) |
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
= 1( + 2) ( + 2) |
|
|
̅ |
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
( + 3) |
= 1( + 2) ( + 2) |
|
1.4 МОДЕЛИРОВАНИЕ |
|
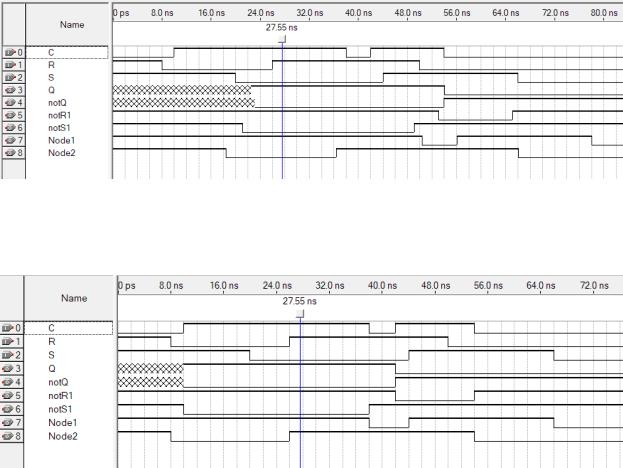
Было выполнено моделирование составленной функциональной схемы из пункта 1.2. На рисунке 1.2 изображен результат моделирования в режиме
Timing.
4

Рисунок 1.2 – Моделирование динамического RS-триггера в режиме Timing
По результатам моделирование видно, что состояние изменяется в момент после смены синхросигнала из состояния 0 в состояние 1, но при этом есть задержка между активностью такого сигнала и смены состояния равная примерно 13нс.
На рисунке 1.3 представлен результат моделирования в режиме
Functional.
Рисунок 1.3 – Моделирование RS-триггера в режиме Functional
По результату моделирования схемы в режиме Function видно, что происходит моментальный отклик на тактируемый фронтом синхросигнал .
По результатам моделирования можно сделать вывод, что схема выполнена в соответствии с таблицей функционирования динамического RS-
триггера 1.1.
1.5 ОПИСАНИЕ С ПОМОЩ ЬЮ HDL
Ниже представлен код на SystemVerilog:
module RS( input logic R, input logic S, input logic C,
5
output logic Q, output logic notQ,
output logic Node1, output logic Node2, output logic notR1, output logic notS1 );
assign Node1 = ~(~S & notS1); assign Node2 = ~(~R & notR1);
assign notR1 = ~(C & Node2 & notS1); assign notS1 = ~(C & Node1 & notR1); assign Q = ~(notQ & notS1);
assign notQ = ~(Q & notR1); endmodule
На рисунке 1.4 представлено моделирование динамического RS-
триггера в режиме Timing.
Рисунок 1.4 – Моделирование динамического RS-триггера в режиме Timing
На рисунке 1.5 представленно моделирование динамического RS-
триггера в режиме Functional.
Рисунок 1.5 – Моделирование RS-триггера в режиме Functional
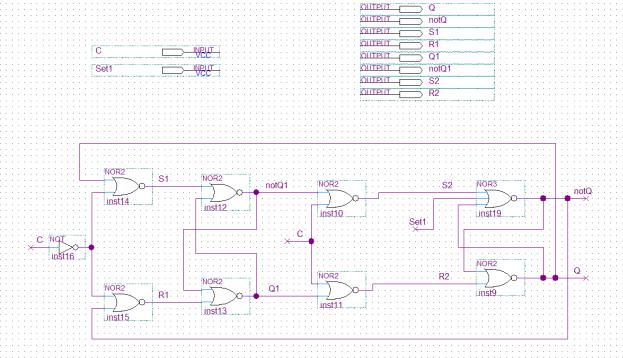
На рисунке 1.6 представлено изображение схемы с помощью RTL
Viewer.
6
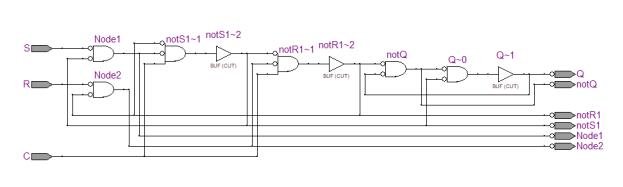
Рисунок 1.6 – RTL Viewer представление
7
2 СТАТИЧЕСКИЙ ДВУХСТУПЕНЧАТЫЙ T-ТРИГГЕР
2.1 ТАБЛИЦА ФУНКЦИОНИРОВАНИЯ
Двухступенчатый Т-триггер работает от одного хода С и меняет одно устойчивое состояние на другое всякий раз, когда на вход С происходит
смена уровня с «1» до «0».
Ниже приведена таблица 2.1, которая отражает функционирование
двухступенчатого Т-триггера.
Таблица 2.1 – Таблица функционирования двухступенчатого Т-триггера
Входы |
|
Выходы |
Переход |
|
|
|
|
|
|
|
( ) |
|
( + 1) |
|
|
|
|
|
|
0 → 1 |
0 |
|
0 |
0 → 0 |
|
|
|
|
|
0 → 1 |
1 |
|
1 |
1 → 1 |
|
|
|
|
|
1 → 0 |
0 |
|
1 |
0 → 1 |
|
|
|
|
|
1 → 0 |
1 |
|
0 |
1 → 0 |
|
|
|
|
|
2.2 ФУНКЦИОНАЛЬНАЯ СХЕМА
На рисунке 2.1 представлена функциональная схема двухступенчатого Т-триггера с базисным элементом ИЛИ-НЕ.
Рисунок 2.1 – Функциональная схема двухступенчатого T-триггера
8
Двухступенчатые триггеры состоят из двух ячеек памяти, запись информации. Двухступенчатые триггеры содержат две ячейки памяти, запись информации в которые происходит последовательно в разные моменты времени. Такую структуру называют системой «ведущий-ведомый».
2.3 ФОРМУЛА
На основе функциональной схемы составим формулы для выходов на основе базисного элемента ИЛИ-НЕ:
|
̅̅̅̅̅̅̅̅̅̅̅ |
|
|
̅̅̅̅̅̅ |
|
1( + 1) = ( ) ( ) |
||
|
̅̅̅̅̅ |
|
|
̅̅̅̅̅̅ |
̅̅̅̅̅̅ |
1( + 1) = ( ) ( ) |
||
|
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
1( + 2) = 1( + 1) 1( + 1) |
||
̅̅̅̅̅̅̅̅̅̅̅̅ |
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
1( + 2) = 1( + 1) 1( + 1) |
||
|
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
2( + 3) = ( + 2) ( + 2) |
||
|
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
2( + 3) = ( + 2) ( + 2) |
||
( + 4) |
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
= ( + 3) 2( + 3) |
||
̅̅̅̅̅̅̅̅̅̅̅ |
̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ |
|
( + 4) = ( + 3) 2( + 3)
2.4 МОДЕЛИРОВАНИЕ
Так как для переключения состояния на противоположное необходимо знать значения изначально, то сперва с помощью дополнительного входа устанавливается значение .
Было выполнено моделирование составленной функциональной схемы из пункта 2.2. На рисунке 2.2 изображен результат моделирования в режиме
Timing.
9
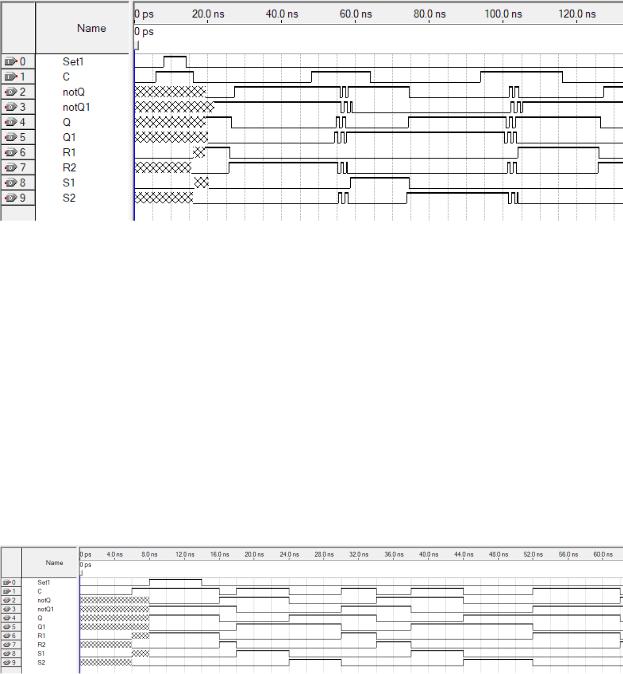
Рисунок 2.2 – Моделирование двухступенчатого Т-триггера в режиме Timing
По результатам моделирование видно, что состояние изменяется в момент после смены синхросигнала из состояния 1 в состояние 0. До этого с помощью вспомогательного сигнала устанавливается изначальное состояние
.
5 нс потребовалось для активизации состояния , примерно 7 нс необходимо, чтобы синхросигнал был в единичном состоянии и 10 нс проходит с момента отключения сигнала и смены выходного состояния.
На рисунке 2.3 представлен результат моделирования в режиме
Functional.
Рисунок 2.3 – Моделирование T-триггера в режиме Functional
По результату моделирования схемы в режиме Function видно, что происходит моментальный отклик на тактируемый фронтом синхросигнал .
По результатам моделирования можно сделать вывод, что схема выполнена в соответствии с таблицей функционирования двухступенчатого
T-триггера 2.1.
2.5 ОПИСАНИЕ С ПОМОЩЬЮ HDL
Ниже представлен код на SystemVerilog:
10