

Учебники 80278
.pdfРис. 34. Схема постоянного тока с параллельным возбуждением
Существуют также двигатели последовательного и смешанного возбуждения (рис. 35) и (рис. 36).
Рис. 35. Схема двигателя постоянного тока с последовательным возбуждением
Рис. 36. Схема двигателя постоянного тока со смешанным возбуждением
51
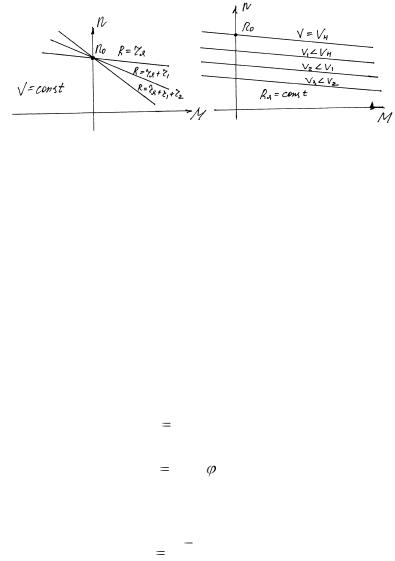
Таким образом, данная механическая характеристика для двигателя постоянного тока с независимым возбуждением (рис. 37).
Рис. 37. Механические характеристики двигателя постоянного тока с независимым возбуждением
Двигатели постоянного тока с независимым или параллельным возбуждением имеют жесткую естественную характеристику, то есть достаточно стабильно держат обороты и в то же время путем регулирования тока или напряжения могут легко и плавно переходить на другие номинальные обороты. В этой связи они нашли наибольшее применение в приводе КПО.
Для двигателя последовательного возбуждения ток якоря и ток обмотки возбуждения один и тот же.
С некоторым упрощением характеристику насыщения магнитного потока в зависимости от тока намагничивания можно считать линейной.
М С мФYя , |
(92) |
M Cм К Y 2 . |
(93) |
Для двигателя постоянного тока ранее получено:
n |
V YR |
, |
(94) |
|
CеФ |
||||
|
|
|
52
Считаем, что
|
|
|
|
|
|
Ф |
|
К Y , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф |
К |
|
|
|
|
|
М |
|
, |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
См К |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
См К |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
n |
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
С м К R |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Cе |
К |
|
|
М |
|
|
|
|
|
Cе |
К |
|
|
|
|
М |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
С м |
К |
|
|
|
|
|
|
|
|
С м |
К |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
В |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Се К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Cе К |
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
С м К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(95)
(96)
(97)
(98)
Полученная зависимость для механической характеристики двигателя постоянного тока с последовательным возбуждением представляет собой гиперболу (рис. 38)
При холостом ходе М 0, n  . В действительности всегда существует некоторый момент сопротивления, но, тем не менее, скорость вращения ротора может достигнуть 6-и кратного номинального значения. Поэтому двигатели последовательного возбуждения не устанавливают в приводах с ременными передачами (в случае обрыва М 0 и он пойдет «в разное»). На рабочем участке его характеристика мягкая, а, следовательно, двигатель постоянного тока последовательного возбуждения плохо приспособлен для приводов, требующих постоянной скорости при меняющейся нагрузке (рис. 38). В основном эти двигатели применяются там, где требуется большой момент при трогании с места и при малых скоростях. Это на транспорте и в крановых установках.
. В действительности всегда существует некоторый момент сопротивления, но, тем не менее, скорость вращения ротора может достигнуть 6-и кратного номинального значения. Поэтому двигатели последовательного возбуждения не устанавливают в приводах с ременными передачами (в случае обрыва М 0 и он пойдет «в разное»). На рабочем участке его характеристика мягкая, а, следовательно, двигатель постоянного тока последовательного возбуждения плохо приспособлен для приводов, требующих постоянной скорости при меняющейся нагрузке (рис. 38). В основном эти двигатели применяются там, где требуется большой момент при трогании с места и при малых скоростях. Это на транспорте и в крановых установках.
53
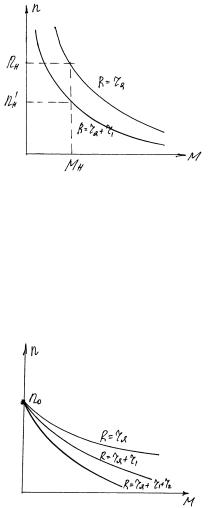
Рис. 38. Механическая характеристика двигателя постоянного тока последовательного возбуждения
У двигателей со смешанным возбуждением наличие двух обмоток возбуждения приводит к тому, что механическая характеристика занимает промежуточное положение (рис.39). Обмотка независимого возбуждения создает постоянную магнитодвижущую силу и обеспечивает магнитный поток при отсутствии тока в цепи якоря и, следовательно, возможность работы двигателя на холостом ходу.
Рис. 39. Механическая характеристика двигателя постоянного тока со смешанным возбуждением
Магнитодвижущая сила последовательной обмотки увеличивает магнитный поток двигателя, что способствует повышению пускового момента. Двигатели смешанного возбуждения применяются там, где требуется значительный пусковой момент и большое ускорение (компрессоры, насосы, прокатные станы).
54
17. ПУСК ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Было показано, что у двигателей постоянного тока напряжение сети уравновешивает противо ЭДС якоря и падение напряжения на его внутреннем сопротивлении
V Е Yя rя . |
(99) |
В момент пуска якорь неподвижен и при n = 0:
Е Се nФ 0 . |
(100) |
Поэтому при непосредственном включении якоря на номинальное напряжение пусковой ток будет
Yп |
Vн |
10 20Yн . |
(101) |
|
rя |
||||
|
|
|
Такой большой ток опасен для коллектора и щеток двигателя. Обычно допускаются следующие превышения пускового тока над
номинальным. |
|
|
|
N = 1 |
10 кВт |
Yп |
2,5 Yн |
N = 10 150 кВт |
Yп |
2 Yн |
|
N = 150 |
300 кВт |
Yп = 1,5 2Yн |
|
Для снижения пускового тока в цепь якоря вводят добавочное сопротивление в виде специального пускового реостата и его сопротивление подбирают так, чтобы пусковой ток был в пределах допустимого значения. Исключение составляют двигатели мощностью до 1 кВт, у которых обмотка якоря выполнена из тонкой проволоки, имеющей значительное сопротивление.
Обычно полное сопротивление пускового реостата разбивают на несколько ступеней, разгон идет по начальным участкам искусственных характеристик (рис. 40, 41).
55
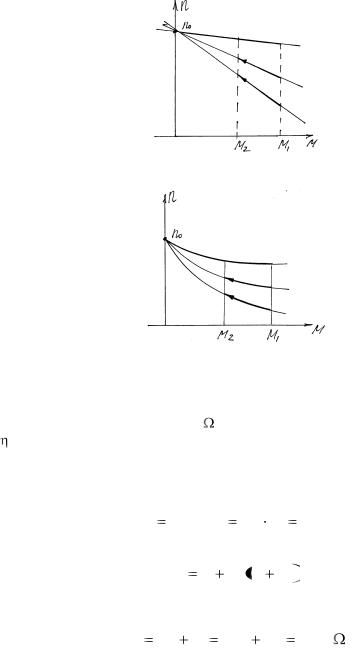
Рис. 40. Пуск двигателя постоянного тока с независимым возбуждением
Рис. 41. Пуск двигателя постоянного тока со смешанным возбуждением
Пример: Двигатель параллельного возбуждения со следующими данными VН = 220v, rя = 0,3 , Nн = 10 кВт, nн = 1100 об/м, Yн = 53 а, н =0,86. Определить полное сопротивление пускового реостата, если
требуется получить начальный пусковой момент Мп =2,5Мн.
У двигателя параллельного возбуждения ток прямо пропорционален моменту. Поэтому начальный пусковой ток будет:
Y |
Yн |
М |
п |
2,5 53 132а , |
|
||||
п |
М н |
|
|
|
|
|
|
|
|
|
V |
Е |
|
Yп rя rп . |
При пуске Е = 0
rп |
V |
rя |
220 |
0,3 165,7 |
||
|
|
|
||||
Yп |
132 |
|||||
|
|
|
||||
|
|
|
56 |
|
||
18. ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Электродвигатели постоянного тока могут работать в трех тормозных режимах:
1.В режиме противовключения;
2.Генераторном режиме;
3.Режиме динамического торможения.
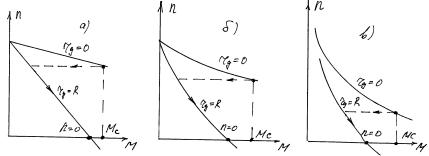
Режим противовключения такой, когда якорь двигателя под действием внешнего момента или запаса кинематической энергии вращается в направлении противоположном тому, которому он должен следовать в двигательном режиме. При торможении противовключением ток якоря создается напряжением сети и ЭДС якоря. Энергия, отбираемая из сети преобразуется в теплоту, нагревающую элементы якоря, поэтому для ограничения тока вводят реостат с большим сопротивлением.
Возможны два случая противовключения:
а) ввода добавочного сопротивления без изменения полярности тока якоря (рис. 42);
б) с изменением полярности (рис. 43).
Рис. 42. Торможение противовключением двигателя постоянного тока с добавочным сопротивлением в цепи якоря:
а) двигатель постоянного тока с независимым возбуждением; б) двигатель постоянного тока со смешааным возбуждением; в) двигатель постоянного тока с последовательным возбуждением
57
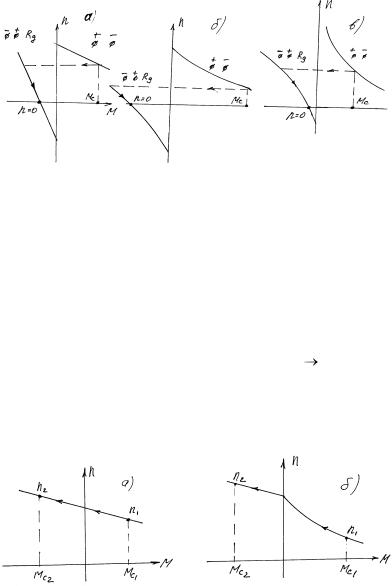
Рис. 43. Торможение противовключением с изменением полярности и добавочным сопротивлением:
а) независимое возбуждение; б) смешанное возбуждение; в) последовательное возбуждение
Генераторное торможение осуществляется тогда, когда скорость двигателя оказывается выше скорости идеального холостого хода и его ЭДС становится больше приложенного напряжения (рис. 44). В этом случае двигатель работает в режиме генератора. Торможение в этом режиме не приводит к остановке, а лишь оганичивает скорость якоря. Для двигателя последовательного возбуждения такой режим не возможен, так как n0 ∞ то есть превысить его невозможно и невозможно создать ЭДС больше чем напряжение в сети. У двигателей со смешанным возбуждением при работе в генераторном режиме последовательную обмотку включают при n = n0 и переходят на характеристику аналогичную двигателю с параллельным возбуждением (рис. 44 б).
Рис. 44. Режим генераторного торможения двигателя постоянного тока:
а) с независимым возбуждением; б) со смешанным возбуждением
58
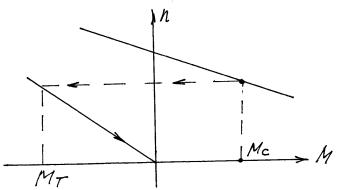
Режим динамического торможения возникает при отключении якоря от сети и замыкания его на сопротивление (рис. 45).
Рис. 45. Режим динамического торможения двигателя постоянного тока с независимым возбуждением
Обмотки двигателей с параллельным и смешанным возбуждением остаются включенными в сеть. Обмотка последовательного возбуждения от сети якоря отключается. Таким образом, образуется схема генератора с независимым возбуждением, но энергия не отдается в сеть, а выделяется в виде тепла на сопротивление якоря. Под действием ЭДС ток якоря изменяет направление и генераторный электромагнитный момент затормозит вращение якоря до остановки.
19. РЕГУЛИРОВАНИЕ СКОРСОТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ
Регулирование скорости - принудительное изменение скорости электропривода в зависимости от требований технологического процесса. Основная цель регулируемых приводов, применяемых для КПО - создание оптимального темпа штамповки, сочетающего требуемое качество штамповки и высокую производительность.
Способы регулирования характеризуются следующими показателями:
1.Диапазоном регулирования;
2.Плавностью регулирования;
59
3.Экономичностью;
4.Стабильностью скорости;
5.Направлением регулирования скорости;
6.Допустимой нагрузкой при различных скоростях.
Диапазон регулирования определяется отношением возможных установившихся максимальной и минимальной скоростей:
Д |
wмах |
. |
(102) |
|
|||
|
wmin |
|
|
Плавность регулирования характеризует скачок скорости при переходе от одной скорости к другой.
|
i |
. |
(103) |
|
|
||
п |
|
||
|
i 1 |
|
|
При абсолютно плавном регулировании |
∞, число ступе- |
||
ней z ∞.
Экономичность регулирования характеризуется затратами на сооружение и эксплуатацию электропривода и сопутствующего оборудования.
Потери мощности при регулировании определяют КПД:
РВ |
, |
(104) |
РВ Р |
где РВ - мощность на валу; Р - потери мощности.
Потери мощности при регулировании скорости различны для разных способов регулирования. Они сравнительно велики в системах, где регулирование ведется в главных цепях машины, и значительно ниже при регулировании в цепях возбуждения, поскольку эти цепи для машин постоянного тока составляют 1 - 5 % от мощности.
Стабильность угловой скорости характеризуется изменением угловой скорости при заданном отклонении момента нагрузки и зависит от жесткости механической характеристики. Она тем больше, чем больше жесткость (рис. 46).
60