

Учебники 80278
.pdfРис. 12. Схема асинхронного двигателя с фазным ротором: 1 - контактные кольца, 2 - пусковой реостат, 3- обмотка ротора
7. СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Для анализа работы асинхронного двигателя пользуются схемой замещения или электрическим эквивалентным аналогом. Взаимодействие тока статора с током ротора во многом схоже с принципом действия трансформатора.
Из электротехники известно, что цепь обмотки, питаемая перемененным током, состоит из активного сопротивления и сопротивления, связанного с индуктивностью - реактивного (рис. 13).
Рис. 13. Схема замещения асинхронного двигателя
Y1 - ток статора;
Y2 - приведенный ток ротора;
r1, х1, - активное и индуктивное сопротивление статорной обмотки;
Е1, Е2 - ЭДС обмоток статора и ротора;
21
r r |
1 s |
- сопротивление, которое имитирует нагрузку, |
|
||
2 |
s |
|
|
|
связанную со скольжением s .
С целью упрощения анализа магнитная связь между обмотками статора и ротора заменяется условно гальванической при этом r2 x2 приводятся к обмотке статора:
|
|
|
|
E1 |
2 |
V |
2 |
|
r |
r k 2 |
r |
|
r |
, |
(30) |
||
|
|
|
||||||
1 |
2 |
2 |
|
E2 |
2 |
E2 |
|
|
|
|
x2 |
|
x2 k 2 . |
|
|
(31) |
|
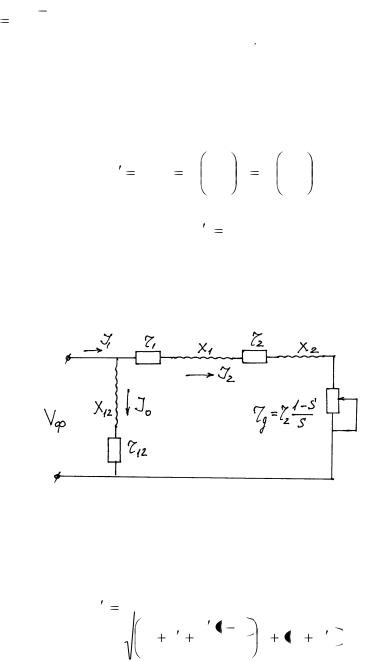
Полученная Т-образная схема замещения сложна для анализа, и в практических расчетах ее заменяют Г-образной, вынося ветвь намагничивания на внешние зажимы (рис. 14).
Рис. 14. Упрощенная схема замещения
В соответствии с законом Ома определяют приведенный ток фазы ротора по формуле:
Y2 |
|
|
|
V |
|
|
. |
(32) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
r2 1 s |
2 |
|||||
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|
|
|
|
|
|
r1 |
r2 |
|
x1 x2 |
|
||
s |
|
|||||||
|
|
|
|
|
|
|
|
|
22
Учитывая, что |
|
|
|
|
|
|
|
|
|
||
r |
r2 |
1 |
s |
|
r2 |
, |
(33) |
||||
|
|
|
|
||||||||
2 |
|
|
|
s |
|
|
s |
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
x1 |
x2 |
|
xk , |
(34) |
||||
Y2 |
|
|
|
V |
|
|
|
|
|
. |
(35) |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
r2 |
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
r |
|
x 2 |
|
|||||
|
|
|
|
|
|
||||||
|
|
|
1 |
s |
|
|
k |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
8. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Мощность двигатедля определяется по формуле:
N M . |
(36) |
где М - момент;
-угловая скорость ротора.
Васинхронном двигателе различают электромагнитную мощность и механическую мощность:
N эм. |
М эм. 0 , |
(37) |
Nмех. |
М эм. . |
(38) |
- электромагнитный момент, возникающий в результате взаимодействия тока ротора с электромагнитным полем статора;
0 - частота вращегния поля.
Если пренебречь потерями мощности в сердечнике ротора, то разность электромагнитной и механической мощностей будет равна потерям мощности в обмотке ротора.
23
N |
обм. |
N |
эм. |
N |
мех. |
3Y 2r , |
(39) |
|
|
|
2 2 |
|
где Y2 и r2 - ток и акт. сопротивление ротора. или
M |
эм. 0 |
M |
эм. |
3Y 2r |
, |
(40) |
||
|
|
2 2 |
|
|||||
|
|
3Y 2r |
3Y 2r |
|
|
|||
М эм. |
2 2 |
|
2 2 |
. |
|
(41) |
||
|
|
|
|
|
||||
00 s
Сучетом полученного значения приведенного тока из схемы замещения:
|
|
|
|
|
3Y |
2r |
|
|
|
||
|
М |
эм. |
|
2 |
2 |
, |
|
(42) |
|||
|
|
0 s |
|||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
3V 2 r |
|
|
|
|
|||
M эм. |
|
|
|
|
2 |
|
. |
(43) |
|||
|
|
|
|
|
r2 |
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
||
0 |
s |
r |
|
|
|
|
x2 |
|
|||
|
|
|
|
|
|
||||||
|
1 |
|
s |
|
k |
|
|||||
|
|
|
|
|
|
|
|
|
|
||
Из формулы следует, что Мэм. - пропорционален квадрату действующего напряжения на фазе статора. Следовательно, даже умеренные изменения напряжения будут сопровождаться существенными изменениями Мэм.
По зависимости для Мэм. можно построить график механической характеристики, которая имеет выраженный максимум. Взяв
производную |
dM |
0 . Найдем |
Sкр |
|
|
r2 |
|
. |
В практиче- |
||
d4 s |
|
|
|
|
|||||||
|
|
r12 xk2 |
|||||||||
|
|
|
|
|
|
|
|
|
|||
ских расчетах принимают Sкр |
r2 |
|
- считается что |
r2 мало. Это |
|||||||
xk |
|||||||||||
|
|
|
|
|
|
|
|
|
|||
значение скольжения, соответствующее максимальному моменту называют критическим. Подставив в Мэм. значение Sкр. получим:
24
Ммах |
|
|
|
3V 2 |
|
|
, |
(44) |
|
|
|
|
|
|
|
|
|||
|
|
|
r2 |
|
|||||
2 |
0 |
r |
|
x2 |
|
||||
|
|
1 |
1 |
k |
|
||||
где «+» - двиг. режим; «-» - генерат. режим.
Если выражение Мэм. разделить на Ммах, то получим после преобразования:
|
|
|
2 |
βSкр |
М мах |
|
|
|
|
|
|||||||||
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
, |
|
(45) |
||
|
|
|
|
|
|
|
Sкр |
|
βSкр |
|
|||||||||
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Sкр |
|
|
|
S |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где β |
r1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обычно считают, что |
0, M |
|
|
|
2M max |
|
, |
S |
0 |
|
. (46) |
||||||||
|
|
|
S |
|
|
Sкр |
|
|
0 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Sкр |
|
S |
|
|
|
|
|
||||
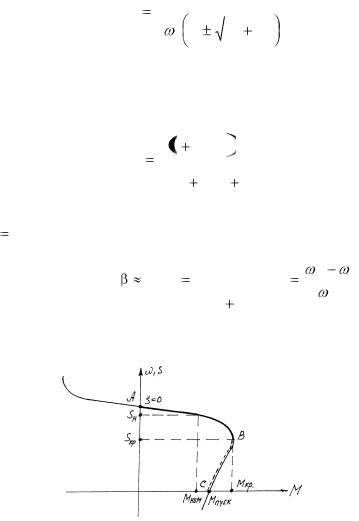
Характерные точкам механической характеристики (рис. 15):
Рис. 15. Механическая характеристика асинхронного двигателя где S = 0, M = 0 - скорость двигателя равна синхронной;
S = Sном., M = Мном. - номинальная скороть при номинальном моменте;
S = Sкр., M = Мкр. - максимальный момент в двигательном режиме;
S = 1, M = Мп - начальный пусковой момент.
25
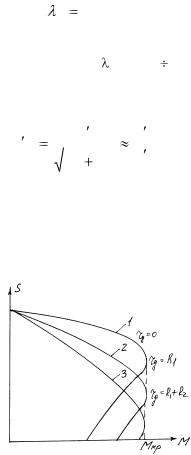
Критическое скольжение Sкр. определяет рабочий участок характеристики от т. А до т. В, где двигатель работает устойчиво. Увеличение момента сопротивления на этом участке снижает скорость вращения ротора, а это сопровождается увеличением вращающего момента. То есть наступит динамическое равновесие с новой уменьшенной скоростью. Аналогично и при уменьшении момента сопротивления.
На участке ВС - режим работы неустойчивый. Кратность Мкр. к Мн определяет перегрузочную спососбность эл. двигателя:
|
к |
|
М к |
|
. |
|
|
(47) |
|||
|
|
М н |
|
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
Для отечественных двигателей |
|
|
|
= 1,65 2,5 и укзывается в |
|||||||
технической характеристике (каталоге). |
|
|
|
|
|
|
|||||
Было ранее показано, что |
|
|
|
|
|
|
|
|
|
|
|
Sкр |
|
r1 |
|
|
|
|
|
r2 |
, |
(48) |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|||||||
|
|
2 |
|
2 |
|
|
|
xk |
|
||
|
|
r1 |
xk |
|
|
|
|
|
|
||
то есть критическое скольжение пропорционально сопротивлению ротора.
Таким образом изменением активного сопротивления ротора можно менять величину критического скольжения при неизменном значении критического момента (рис. 16):
Рис. 16. Механические характеристики асинхронного двигателя с фазным ротором
26
Дополнительное сопротивление rg будет увеличивать Sк. График 1 - естественная характеристика (rg = 0), графики 2 - 3 - искуственная характеристика (rg =Ri, rg = R1 +R2 и так далее).
Таким образом, для асинхронных двигателей с контактными кольцами (с фазным ротором) имеется возможность, вводя в цепь ротора добавочное сопротивление, регулировать величину, как критического скольжения, так и скорость вращения ротора. Но при этом следует учитывать, что снижается жесткость характеристики и, кроме того, двигатели с фазным ротором имеют большие размеры и по стоимости выше в 1,5 раза. Двигатели с фазным ротором находят применение в электроприводе кузнечно-прессовых машин.
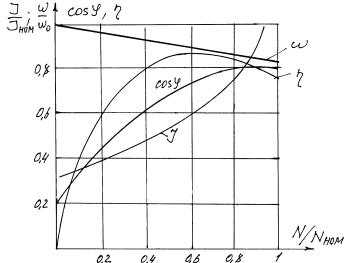
9. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Рабочие характеристики показывают зависимость основных параметров машины от мощности на валу двигателя (рис. 17):
К этим параметрам относятся: ток, активная мощность, КПД, скорость ротора и коэффициент мощности двигателя.
Рис. 17. Рабочие характеристики асинхронного двигателя
27
Коэффициент мошности двигателя определяется исходя из того, что мощность индуктивных потребителей:
N YV cos , |
(49) |
где - величина угла в град. сдвига фаз между напряжением и током из-за добавочного индуктивного сопротивления в обмотках.
По теории переменного тока эффективность действия индуктивных потребителей пропорциональна cos - коэффициент мощности. С увеличением нагрузки увеличивается активная составляющая тока статора и cos - увеличивается. В паспортную табличку двигателя выносят:
а) номинальное линейное напряжение, к которому может быть подключен двигатель (обычно для трехфазных двигателей указывают два напряжения, учитывающие возможность переключения с треугольника на звезду Δ/Y 220/380);
б) номинальную механическую мощность в kw;
в) номинальную частоту вращения ротора, соответствующую номинальной нагрузке об/мин;
г) номинальный КПД %;
д) номинальный коэффициент мощности cos .
Вкаталогах на двигатели указывается тип двигателя; перегру-
зочная способность Ммах/Мном.; кратность пускового момента Мп/Мном.; кратность пускового тока Yп/Yном.; габариты, вес, установочные размеры.
10.ПУСК АСИНХРОННОГО ДВИГАТЕЛЯ С К3 РОТОРОМ
Вначале пуска ротор двигателя неподвижен и ЭДС в его обмотке достигает наибольшего значения:
Ест. |
1 |
|
S |
0 wф , |
(50) |
|
|
|
|
||||
2 |
|
|
||||
|
|
|
|
|
||
где S - скольжение;
- скольжение;
w - число витков обмотки;
ф - магнитный поток полюса двигателя.
При неподвижном роторе S = 1, следовательно:
= 1, следовательно:
28
Ест. Ест.мах |
1 |
|
0 wф . |
(51) |
||
|
|
|
||||
|
|
|
||||
2 |
||||||
|
|
|
|
|||
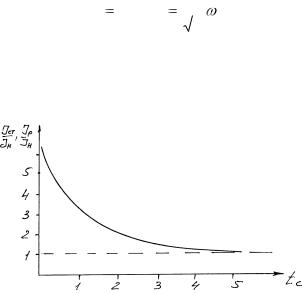
Это приводит к повышению тока в статоре и роторе. Таким образом, при пуске электродвигателя с К3 ротором из сети потребляется ток, превышающий номинальный в 4 - 8 раз (рис. 18).
Рис. 18. Изменение пусковых токов
Толчок пускового тока вызывает в сети понижение напряжения. При пуске двигателя большой мощности это снижение напряжения может привести к остановке других двигателей, поскольку момент на валу асинхронного двигателя пропорционален квадрату напряжеия в сети.
Поэтому пуск асинхронного двигателя без применения средств ограничивающих пусковой ток допускается лишь в случае, если номинальная мощность двигателя не превышает 25 % мощности трансформаторов, обслуживающих цех. В случае наличия на трансформаторной нагрузке и осветительной сети мощность двигателя не должна превышать 5 % трансформаторной.
Большой пусковой ток ограничивает также допустимое число включений двигателя в час. При большом числе включений даже мало загруженный двигатель из-за больших пусковых токов может перегреться. Для уменьшения пускового тока асинхронные двигатели с обычным К3 ротором могут запускаться с включением в обмотку статора дополнительного сопротивления (рис. 19).
29
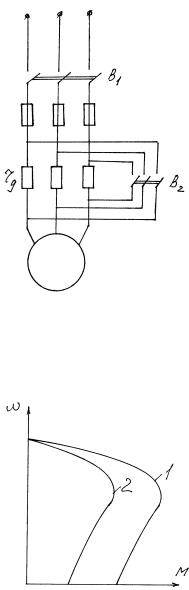
Рис. 19. Схема с дополнительными пусковыми сопротивлениями rg
Перед пуском выключатель В2 устанавливается в выключенное положение, после окончания разбега включают В2. Соответствующим подбором rg можно ограничить ток до любой величины, но одновременно уменьшаются пусковой и критический моменты (рис. 20).
Рис. 20. Пусковые токи с дополнительными сопротивлениями - 2 и без них -1
30