

Энергетика электропривода переменного тока. Фролов Ю.М., Романов А.В
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
Ю.М. Фролов А.В. Романов
ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА
Учебное пособие
Воронеж 2002
УДК 62-83.681.513.3
Фролов Ю.М. Энергетика электропривода переменного тока:
Учеб. пособие / Ю.М. Фролов, А.В. Романов. Воронеж. гос. техн. ун-т. Воро-
неж, 2002.85 с.
В учебном пособии рассмотрены положения теории общих закономерностей электромеханического преобразования энергии с примерами по определению энергетических показателей конкретных систем при исследовании и проектировании современных электроприводов переменного тока. Материал учебного пособия может быть использован при выполнении курсового и дипломного проектирования, лабораторных работ, в студенческой научной работе.
Издание предназначено для студентов специальности 180400 «Электропривод и автоматика промышленных установок и технологических комплексов» по дисциплине «Теория электропривода» и может быть использовано студентами, обучающимися по направлению «Электротехника, электромеханика и электротехнологии» при анализе энергетики электрических приводов переменного тока при работе в статическом и динамическом режимах.
Табл. 1. Ил. 26. Библиогр.: 9 назв.
Научный редактор д-р техн. наук, проф. В.Л. Бурковский
Рецензенты: кафедра электротехники Воронежского государственного агроуниверситета; канд. техн. наук В.А. Хомяк
Печатается по решению редакционно-издательского совета Воронежского государственного технического университета
©Фролов Ю.М., Романов А.В., 2002
©Оформление. Воронежский государственный технический университет, 2002
ВВЕДЕНИЕ
В условиях ускорения научно-технического прогресса существенное значение приобретает автоматизированный электропривод, составляющий энергетическую основу механизации и автоматизации различных отраслей промышленности и сельского хозяйства.
Успехи в области силовой полупроводниковой техники, микроэлектроники, систем автоматизированного управления создают необходимые предпосылки для совершенствования современного электропривода и значительного расширения его технических и функциональных возможностей, что позволяет наиболее полно удовлетворить всѐ возрастающие технологические требования и обеспечить эффективную работу производственных машин и агрегатов. Очевидно, что решение этой задачи связано с широким использованием регулируемых приводов, в которых при помощи полупроводниковых преобразователей оказывается возможным изменять параметры энергии, подводимой к электродвигателю в переходных и установившихся режимах, и, тем самым, обеспечивать реализацию управляемых режимов при необходимых, заданных показателях качества.
Вопросы регулирования скорости вращения асинхронных двигателей (АД) постоянно находятся в центре внимания исследователей. Это вызвано тем, что АД является самым простым, надежным и экономичным типом двигателя. Он превосходит по массогабаритным показателям двигатель постоянного тока такой же мощности и частоты вращения. Однако регулирование скорости АД осложнено нелинейностью его характеристики. Наиболее часто регулирование скорости АД осуществляется путѐм изменения таких параметров как: сопротивления роторной цепи, напряжения статора, числа пар полюсов, частоты питающего напряжения, а также применения каскадного и импульсного способов.
Большое разнообразие существующих способов управления ставит перед проектировщиком сложную задачу по выбору оптимального способа управления с точки зрения технологических требований, технико - экономических показателей. Наиболее эффективным способом решения этой проблемы является применение вычислительной техники при проектировании.

1. ЭЛЕКТРОМЕХАНИЧЕСКОЕ ПРЕОБРАЗОВАНИЕ ЭНЕРГИИ В АСИНХРОННОМ ДВИГАТЕЛЕ
Энергетические показатели учитываются при технико-экономическом обосновании выбранного рода тока и способа управления электроприводом (ЭП), а также при расчѐте капитальных и эксплутационных затрат. К таким энергетическим показателям относятся: коэффициент полезного действия и коэффициент мощности ЭП.
В любой электрической машине происходит электромеханическое преобразование энергии (ЭМП), в процессе которого часть энергии теряется из-за того, что сопротивление обмоток не равны нулю, существует трение в подшипниках и трения о воздух, перемагничивание стали и т.д. Сложность описания ЭМП, а, следовательно, и определения потерь энергии в асинхронном двигателе (АД) заключается в том, что здесь невозможно разделить цепи якоря и возбуждения, имеются в наличии нелинейные элементы магнитной цепи и т.п. Для упрощения расчѐтов при определении энергетических показателей, как правило, принимают следующие допущения:
1)фазные обмотки двигателя расположены симметрично;
2)гистерезис, вихревые токи, насыщение магнитной системы и потоки рассеяния отсутствуют.
Рассмотрим энергетическую диаграмму АД с фазным ротором, представ-
ленную на рис. 1.1.1, где P – активная мощность, потребляемая из сети; |
P |
– |
1 |
ЭМ1 |
|
электромагнитная мощность статора; PЭМ – электромагнитная мощность в воз- |
||
душном зазоре; PМЕХ – механическая мощность; P2 – мощность на валу; |
pМ 1– |
|
потери мощности в обмотках статора; pС1 – потери в стали статора; pС 2 – потери в стали ротора; pМ 2 – потери в обмотках ротора; pД – потери в доба-
вочных сопротивлениях ротора; pМЕХ – механические потери в подшипниках и на вентиляцию.
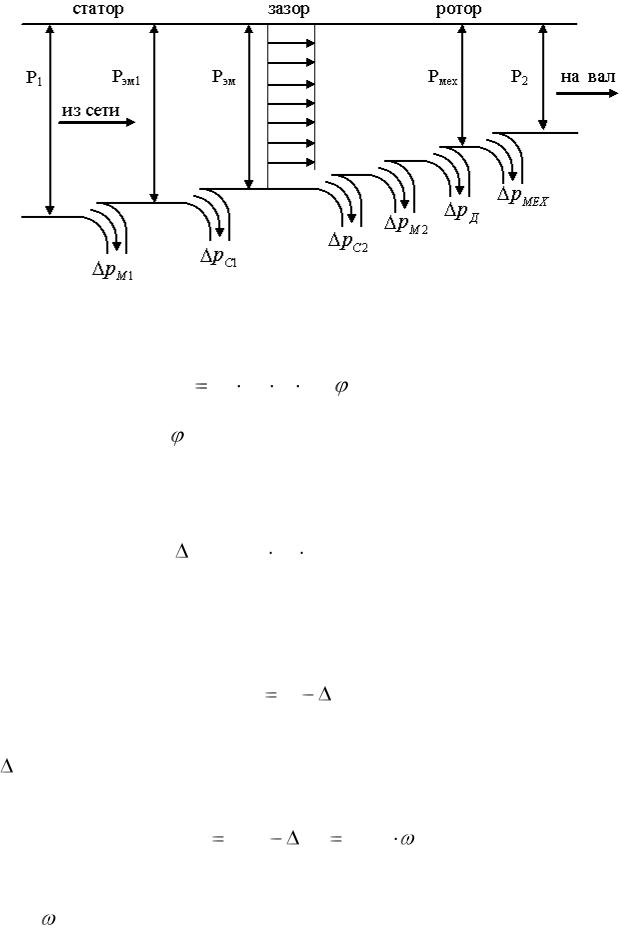
Рис. 1.1. Энергетическая диаграмма АД с фазным ротором
Двигатель потребляет из сети электрическую мощность
P |
m U |
I cos |
1 |
, |
(1.1) |
|
1 |
1 |
1 |
1 |
|
|
|
где m1 , U1 , I1 , cos 1 – соответственно число фаз, фазный ток, напряжение и
коэффициент мощности статора.
Поступившая в статор энергия частично рассеивается в активных сопротивлениях статора. Эти потери мощности определяются равенством
p |
М 1 |
= m |
I 2 R |
, |
(1.2) |
|
1 |
1 |
|
|
где R1 – сопротивление фазы обмотки статора, Ом.
Основная часть потребляемой мощности идѐт на создание электромаг-
нитной мощности статора |
|
|
|
|
|
P |
P |
p |
М 1 |
. |
(1.3) |
ЭМ1 |
1 |
|
|
|
Часть электромагнитной мощности статора расходуется на потери в стали pС1 , а большая часть передаѐтся через зазор к ротору и представляет собой
мощность электромагнитного поля в зазоре
PЭМ PЭМ1 pС1 M ЭМ 1 |
(1.4) |
где M ЭМ – электромагнитный момент;
1 – угловая скорость вращения магнитного поля относительно статора.
Магнитное поле в воздушном зазоре вращается относительно обмотки статора с синхронной скоростью
|
|
|
2 |
f1 |
|
(1.5) |
|
|
1 |
|
pn |
||
|
|
|
|
|||
|
|
|
|
|
||
где |
f1 – частота питающей цепи; |
|
|
|
||
|
pn – число пар полюсов обмотки статора. |
|
||||
|
Относительно ротора магнитное поле вращается с угловой скоростью |
|||||
|
2 2 |
|
f2 |
1 S , |
(1.6) |
|
где |
S – скольжение ротора относительно поля статора. |
|
||||
|
Скорость вращения ротора направлена согласно с полем статора и равна |
|||||
|
1 |
2 |
1 (1 S) |
(1.7) |
||
|
Электромагнитная мощность в воздушном зазоре расходуется на совер- |
|||||
шение механической работы и покрытие потерь в цепи ротора |
p рот. Потери в |
|||||
стали ротора ( pС 2 ) при номинальном моменте двигателя и скольжениях, при-
ближающихся к единице, в |
2 – 2.5 раза превышают потери в стали ротора в |
|
номинальном режиме ( pС 2 Н ) /1/. Однако и в этом случае |
|
|
pC 2 |
0.1 pC1Н |
(1.8) |
где pС1Н – потери в стали статора в номинальном режиме |
|
|
pС 2 Н |
(0.04 0.05) pС1Н |
(1.9) |
Тогда потери в роторе можно записать |
|
|
PЭМ = PМЕХ + p рот |
(1.10) |
|
Мощность, пропорциональная механической работе, расходуется на совершение полезной работы P2 , механические потери и определяется электромагнитным моментом двигателя и скоростью вращения ротора:
PМЕХ M ЭМ 2 PЭМ (1 S) |
(1.11) |
P2 PМЕХ pМЕХ |
(1.12) |
Мощность, расходуемая на покрытие потерь в цепи ротора, называется мощностью скольжения. Эта мощность определяется выражением
p рот= PЭМ – PМЕХ = PЭМ S . |
(1.13) |
Мощность скольжения рассеивается в сопротивлениях обмотки ротора и на добавочных сопротивлениях:
|
|
|
|
p рот= |
pМ 2 + |
pД , |
|
|
|
(1.14) |
||
|
p |
рот |
m |
I 2 |
R |
m |
I 2 |
R |
m |
I 2 |
R |
(1.15) |
|
|
2 |
2 |
2 |
2 |
2 |
2 Д |
2 |
2 |
2сум |
|
|
где m2 |
– число фаз ротора; |
|
|
|
|
|
|
|
|
|||
I 2 |
– приведѐнный ток ротора, А; |
|
|
|
|
|
|
|||||
R2 |
, R2 Д , R2сум |
– соответственно приведѐнные сопротивления ротора, |
||||||||||
добавочное и суммарное сопротивления, Ом.
Для двигательного режима работы привода коэффициент полезного действия можно определить из равенства
P2 |
|
|
P2 |
|
(1.16) |
|
|
|
|
|
|
P |
|
P |
|
p |
|
1 |
2 |
|
сум |
||
где pсум – суммарные потери в приводе, которые определяются в соответствии с выражением (1.17) согласно /2/
|
|
pсум |
pпос |
pпер |
(1.17) |
где |
pпос и |
pпер – соответственно постоянные и перемененные потери в |
|||
приводе.
Под постоянными потерями понимают потери, которые не зависят от тока нагрузки. Для асинхронного двигателя при работе в обычных схемах включения за постоянные потери принимают потери в стали статора и ротора от то-
ка намагничивания Im , механические потери.
Постоянные потери АД по паспортным данным можно определить из выражения /3/
p |
|
P ( |
1 Н |
|
SН |
(1 |
R1 |
)), |
(1.18) |
пос |
|
|
|
||||||
|
Н |
1 SН |
R2 |
|
|||||
|
|
|
Н |
|
|||||
|
|
|
|
|
|
|
|
||
где PН – номинальная мощность двигателя, Вт.;
Н и SН – соответственно коэффициент полезного действия, и скольжение при работе АД в номинальном режиме.
Переменные потери в приводе зависят от нагрузки и определяются из равенства
pпер = pМ 1+ pМ 2 + pД . |
(1.19) |
Коэффициент полезного действия можно определить из выражения
A |
, |
(1.20) |
A A |
где A – работа, совершаемая приводом, за определѐнный промежуток времени, Дж;
A – полные потери энергии за тоже время, Дж. Полезная работа находится из выражения
t |
|
A P2 (t) dt, |
(1.21) |
0 |
|
а энергия потерь из равенства
A |
t ( pпос |
pпер (t)) dt. |
(1.22) |
|
0 |
|
|
В установившемся режиме работы привода выражения (1.21) и (1.22) можно записать
A P2 tУ MC У tУ , |
(1.23) |
где tУ – длительность работы в установившемся режиме привода,
A ( p |
пос |
p |
пер |
) tУ |
(1.24) |
|
|
|
|
В динамических режимах работы электропривода изменяется и величина полезной мощности и значения потерь мощности.
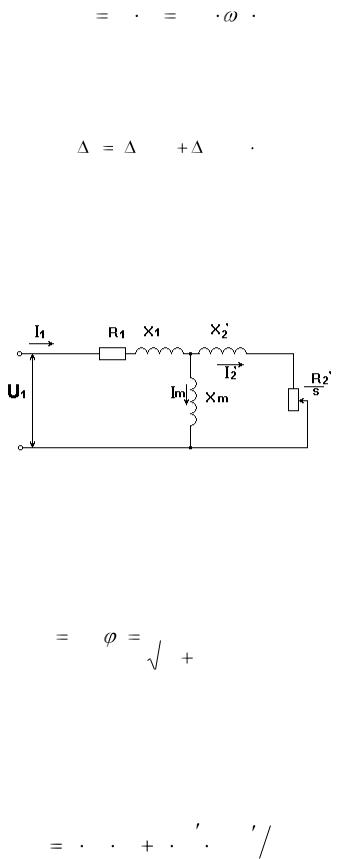
Коэффициент мощности из схемы замещения рис. 1.2 можно найти двумя способами.
Рис. 1.2. Т-образная схема замещения фазы двигателя
Рассмотрим способ первый.
В двигательном режиме, коэффициент мощности двигателя можно определить по формуле
|
|
|
|
P |
|
|
|
|
km |
cos 1 |
|
|
1 |
|
|
, |
(1.25) |
|
|
|
|
|
||||
|
|
|
||||||
|
|
|
P |
|
Q 2 |
|
||
|
|
|
1 |
|
1 |
|
|
|
где Q – реактивная мощность, потребляемая из сети, В*Ар.
Согласно данной схеме замещения активная мощность, потребляемая трѐхфазным асинхронным двигателем из сети, равна
P |
3 I 2 |
R |
3 I 2 |
R |
S , |
(1.26) |
1 |
1 |
1 |
2 |
2сум |
|
|
где R2сум – суммарное приведенное активное сопротивление фазы ротора, которое находится из формулы (1.27)
– суммарное приведенное активное сопротивление фазы ротора, которое находится из формулы (1.27)
R2сум R2 R2 Д . |
(1.27) |
Реактивная мощность, потребляемая из сети, находится из выражения
Q 3 I 2 |
X |
1 |
3 I 2 |
X |
m |
3 I 2 |
X |
2 |
(1.28) |
1 |
|
m |
|
2 |
|
|
Ток статора по схеме замещения определяется по формуле
I |
U |
(R |
1 |
R |
Э |
)2 |
(X |
X |
Э |
)2 |
(1.29) |
1 |
1 |
|
|
|
1 |
|
|
|
где RЭ и X Э – активное и индуктивное эквивалентные сопротивления параллельных ветвей намагничивания и ротора, находятся из равенств (1.30) и (1.31):
|
|
R |
S X 2 |
|
|
|
|
|
|
RЭ |
|
2сум |
|
m |
|
|
|
, |
(1.30) |
(R |
S)2 |
( X |
m |
X |
2 |
)2 |
|||
|
2сум |
|
|
|
|
|
|
||
|
(R |
|
S)2 |
X |
|
|
X |
|
|
X |
|
( X |
|
X |
|
) |
|
|
|||||
X Э |
2сум |
|
|
|
|
m |
|
2 |
|
|
|
|
m |
|
|
|
2 |
|
m |
|
. |
(1.31) |
|
|
(R |
|
|
S)2 |
|
( X |
m |
|
X |
2 |
)2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
2сум |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Ток контура намагничивания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R2 |
|
X 2 |
|
|
|
|
|
|
|
|
|
|
||||
|
I |
|
I |
|
|
|
Э |
|
|
Э |
. |
|
|
|
|
|
|
|
|
|
(1.32) |
||
|
m |
1 |
|
|
X m |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||