

Учебники 80228
.pdfПРИМЕР 9
Расчет энергетических показателей при импульсном регулировании активного добавочного сопротивления в цепи ротора (ИРР)
Рис.5.2. Тахограмма и нагрузочная диаграмма системы ИРР |
|
|
1). Потери при пуске |
|
|
Данные механизма: |
|
|
суммарный момент инерции, кг*м2 |
1; |
|
статический момент, Н*м |
133; |
|
начальная скорость, |
с-1 |
0; |
конечная скорость, |
с-1 |
98; |
продолжительность пуска, с |
0.576. |
|
Активное добавочное приведѐнное сопротивление ротора, Ом |
32. |
|
Средний пусковой момент
M ср,д = 1*98/0.576 + 133 = 364 Н*м.
Потери в меди статора
AM1 = 1.1*916*(0.2 + (1 – 0.2)*(364/133)2)*0.576 = 3590 Дж.
Потери в меди ротора
AM 2 = 1.1*891*(364/133)2*0.576 = 4230 Дж.
Потери в стали статора

AC1 = 640*(0.96 + (1 – 0.96)*(364/133)2)*0.576 = 472 Дж.
Работа, совершаемая в процессе пуска
A = 133*98*0.579/2 = 3750 Дж.
Приращение кинетической энергии
Wкин = 1*982/2 = 4800 Дж.
Активная энергия, потребляемая из сети
Wa = 4230 + 3590 + 472 + 3750 + 4800 = 16800 Дж.
Активная средняя мощность, потребляемая приводом
P1,ср = 16800/0.576 = 29200 Вт.
Коэффициент мощности (1.34 … 1.36) kM = 0.808. Средняя реактивная мощность, потребляемая приводом
Q1,ср = 29200*(1/0.8082 - 1)1/2 = 21300 В*Ар.
Полезная мощность, отдаваемая приводом
P2 = 3750/0.576 = 6510 Вт.
Коэффициент полезного действия
= 6510/(29200)*100 = 22.3 %.
2). Потери энергии при снижении скорости под нагрузкой
Данные привода:
двигатель тип 4АНК180S6У3 |
(см. пример 1) |
коэффициент полезного действия преобразователя, % |
80; |
начальная скорость, с-1 |
98; |
конечная скорость, с-1 |
72; |
статический момент нагрузки, Н*м |
133; |

продолжительность замедления, с |
0.733; |
|
добавочное сопротивление роторной цепи, Ом |
0; |
|
Средний момент двигателя равен |
|
|
M ср,д = 133 – (98 – 72)/0.733 = 97.5 |
Н*м. |
|
Начальное скольжение |
|
|
Sнач |
= 1 – 98/104.7 = 0.064. |
|
Конечное скольжение |
|
|
Sкон |
= 1 – 72/104.7 = 0.312. |
|
Энергия потерь в обмотках
A= (97.5/133)*(133*104.7*0.312+(0.312/0.064)*(1.1*(1 – 0.2)*916 +
+(1 – 0.96)*650 + (0.064/0.312)*(1*0.2*916 + 0.96*650)))*0.773 = 4610 Дж.
Работа, совершаемая приводом за время замедления
A = 133*(98 + 72)*0.733/2 = 8290 Дж.
Энергия, потребляемая из сети
Wa = (4610 + 8290)/0.8 = 16100 Дж.
Коэффициент мощности
kM = (0.2 + (0.81 – 0.6)*(97.5/133)1/2*)0.6 = 0.387
Активная средняя мощность, потребляемая из сети
P1,ср = 22000(1/0.3872 – 1)1/2 = 52400 В*Ар
Коэффициент полезного действия равен
= 8250/16100*100 % = 51.5 %.
3). Потери энергии при динамическом торможении
Данные механизма: статический момент нагрузки, Н*м начальная скорость, с-1 конечная скорость, с-1
продолжительность замедления, с
133;
72;
0;
0.225.
Критический момент динамического торможения, Н*м |
200; |
Средний момент двигателя равен
M ср,д = 1*72/0.225 – 133 = 187 Н*м.
Коэффициент трансформации при заторможѐнном роторе
Ке = 380/205 = 1.85.
Коэффициент затухания ротора
r = (0.597*1.852)/(1.852*16.62 + 0.831) = 0.0354.
Потери энергии в обмотках статора
AM1 = 1.1*916*(2*0.2*200*0.064)/(133*0.0354)*0.225 = 247 Дж.
Потери энергии в обмотках ротора
AM 2 = 1.1*891*(0.0354*1872)/(220*133*0.064)*0.225 = 160 Дж.
Полные потери энергии равны
A= 247 + 160 = 1920 Дж.
5.3.Потери энергии в квазиустановившемся режиме
Потери энергии в квазиустановившемся режиме при импульсном управлении в цепи ротора определяются по формуле (5.9)
A ( |
|
S M |
|
(C |
(1 C) ( |
M С2 |
)2 ) 1.1 p |
|
|
||
1 |
С |
M Н |
М 1Н |
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
. |
(5.9) |
|
|
|
|
M |
|
|
|
|
|
|
||
(B (1 B) ( |
С |
)2 ) |
p |
) t |
|
|
|
|
|||
|
|
П |
|
|
|
||||||
|
|
|
M |
|
|
С1Н |
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
||
ПРИМЕР 9 (продолжение)
4). Потери энергии при квазиустановившемся режиме Данные механизма:
статический момент нагрузки, Н*м |
133; |
установившаяся скорость, с-1 |
98; |
продолжительность установившегося режима, с |
10. |
Энергия постоянных потерь равна
A = (104.7*0.064*133 + (0.2 + (1 – 0.2)*1.1*(133/133)2)*916 + + (0.96 + (1 – 0.96)*(133/133)2)*650) = 29000 Дж.
Полезная мощность, отдаваемая приводом
P2 = 133*98 = 13000 Вт.
Суммарные потери мощности
p = 29000/10 = 2900 Вт.
Потребляемая активная мощность равна
P1 = 13000 + 2900 = 15900 Вт.
Коэффициент полезного действия равен
= 13000/15900*100% = 81.5 %.
Коэффициент мощности Km = 0.815.
Потребляемая реактивная энергия
Q1 = 15900*(1/0.8152 – 1)1/2 = 11300 В*Ар.
6. ЭНЕРГЕТИЧЕСКИЕ ПОКАЗАТЕЛИ СИСТЕМЫ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ – АСИНХРОННЫЙ ДВИГАТЕЛЬ
6.1. Системы преобразователь частоты – асинхронный двигатель
Применение систем преобразователь частоты – асинхронный двигатель (ПЧ-АД) для широкого круга механизмов в различных отраслях производства обусловлено достоинствами частотного регулирования и значительными успехами, достигнутыми в области преобразовательной техники. Осуществление питания АД с короткозамкнутым ротором от статических ПЧ позволило создать экономичный регулируемый привод переменного тока с высокими динамическими и статическими показателями.
По принципу работы силовых схем ПЧ можно разделить на два основных типа: непосредственные (НПЧ); двухзвенные (ДПЧ). На рис. 6.1 пред-ставлены структурные схемы системы ПЧ-АД с НПЧ и ДПЧ.
Рис. 6.1. Структурные схемы систем ПЧ-АД
Преобразователи частоты осуществляют преобразование переменного тока с напряжением и частотой сети в переменный ток с регулируемым напряжением и частотой. В НПЧ (рис. 6.1а) преобразование переменного тока происходит непосредственно (в одну ступень), а в ДПЧ (рис. 6.1б) – с промежуточным преобразованием. Таким образом, в ДПЧ происходит двухступенчатое преобразование электроэнергии, поэтому он содержит выпрямитель В и автономный инвертор АИ, которые связаны между собой фильтром.
Двухзвенные преобразователи частоты могут быть с автономными инверторами напряжения (АИН) и с автономными инверторами тока (АИТ).
По способу регулирования выходного напряжения ДПЧ разделяют на три типа: управляемый выпрямитель – автономный инвертор (УВ-АИ); неуправляемый выпрямитель – прерыватель – автономный инвертор (В-П-АИ) и неуправляемый выпрямитель – автономный инвертор (В-АИ). Структура УВ-АИ предусматривает регулирование напряжения на выходе автономного инвертора с помощью управляемого выпрямителя. Структура В-П-АИ также обеспечивает регулирование напряжения на выходе автономного инвертора, но при неизменном напряжении на выходе выпрямителя. Это достигается прерывателем путем широтно - импульсного регулирования (ШИР). Напряжение на выходе преобразователя со структурой В-АИ регулируется непосредственно инвертором путем широтно-импульсной модуляции (ШИМ) или ШИР.
Все типы ПЧ имеют свою экономически и технически обоснованную область применения. В качестве силовых элементов, обеспечивающих преобразование энергии в преобразователях частоты , находят в основном применение тиристоры и силовые транзисторы.
6.2. Пуск привода в системе ПЧ - АД
Потери энергии в АД при построении привода с ПЧ различных структур в пусковом режиме могут быть определены одинаковым образом.
При линейном изменении частоты питающего напряжения статора в пусковом режиме динамический момент и абсолютное скольжение в первом приближении постоянны и потери энергии в двигателе могут быть определены из выражения (6.1).
|
tП |
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
A |
M |
|
|
S |
|
|
(1 |
|
|
) dt |
|
|
|||
ср.д. |
ад |
1Н |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
R2 |
|
|
||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
, |
(6.1) |
|||
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
||
M |
|
S |
|
|
|
(1 |
) |
|
t |
|
|
|
|
||
ср.д. |
ад |
1Н |
|
|
П |
|
|
||||||||
|
|
|
|
R2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Sад – абсолютное скольжение в динамическом режиме. |
|
|
|||||||||||||
При пуске со скольжением меньшем, чем критическое, оно |
может быть |
||||||||||||||
найдено из равенства (6.2). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sад |
|
M ср.д. |
ksa |
, |
|
|
|
(6.2) |
|||
где ksa – коэффициент, учитывающий жесткость механической характеристики на рабочем участке.
ksa M Н SН . |
(6.3) |
C учетом (6.2) формула (6.1) принимает вид
A M 2 |
k |
sa 1Н |
(1 R |
R ) t |
П |
. |
(6.4) |
ср.д. |
|
1 |
2 |
|
|
Работа, совершаемая приводом в процессе пуска, может быть найдена из выражения (2.5).
Коэффициент мощности привода во многом зависит от способа построения ПЧ. Например, при использовании ДПЧ с неуправляемым выпрямителем коэффициент мощности привода в целом равен единице, однако коэффициент мощности двигателя меньше, поэтому потребляемая приводом энергия равна энергии, потребляемой двигателем с учетом коэффициента полезного действия ПЧ. Коэффициент мощности двигателя можно найти согласно /9/ из выражения
(6.4).
|
|
|
|
kM Ca R1 f* R2 Sa B2 C2 , |
(6.4) |
||
где Ca – коэффициент, определяемый из выражения (6.5);
f* – частота питающего напряжения статора в относительных единицах, где за базовую величину принимается номинальное значение fн = 50 Гц;
Sa – абсолютное скольжение;
B2 |
– коэффициент, вычисляемый по формуле (6.6). |
|
|
|
|
||||||||||||||||||||||
|
C |
a |
|
|
(R |
|
X |
M |
)2 |
|
(1 |
X |
2 |
X |
M |
)2 |
S 2 |
. |
|
|
|
(6.5) |
|||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
||||
Коэффициент B2 равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
B ((R (1 X |
2 |
|
X |
M |
))2 |
( X |
1 |
X |
2 |
X |
1 |
X |
2 |
X |
M |
)2 |
f 2 ) S 2 |
|
|||||||||
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* a |
(6.6) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 R R f |
* |
S |
a |
((R X |
M |
)2 |
(1 X |
1 |
X |
M |
)2 |
f |
2 ) R2 |
|
|||||||||||||
|
1 2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
* |
|
2 |
|
||||||
В выражениях (6.4) и (6.6) фигурирует частота статора в относительных единицах, которую можно определить по формуле
f* S W W1Н . |
(6.7) |
В динамическом режиме коэффициент мощности двигателя определяется как средневзвешенный, для этого находятся его значения в начале и в конце пуска.
Потребляемая приводом при пуске энергия равна
|
Wа ( A |
Wкин A) ( пч kM ) , |
(6.8) |
где |
пч – коэффициент полезного действия преобразователя частоты. |
|
|
При использовании преобразователей других структур коэффициент мощности можно определить аналогично коэффициенту сдвига по формуле (4.24). Активная энергия, потребляемая из сети, определяется по формуле
Wа ( A Wкин A) пч . |
(6.9) |
Реактивная энергия находится по формуле (2.8). ПРИМЕР 10
Расчет энергетических показателей электропривода при регулировании частоты питания статора (система ПЧ – АД)
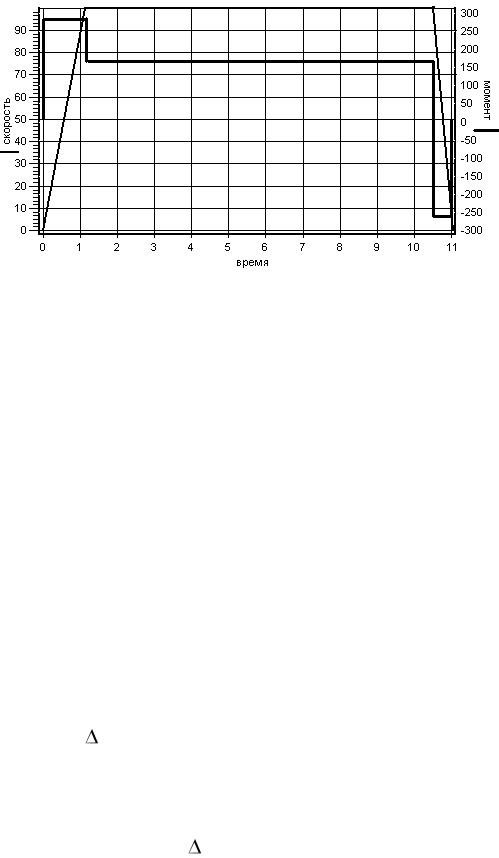
Рис.6.2. Тахограмма и нагрузочная диаграмма системы ПЧ - АД
1. Частотный пуск |
|
|
|
Данные механизма: |
|
|
|
статический момент нагрузки, Н*м |
|
133; |
|
начальная скорость, |
с-1 |
|
0; |
конечная скорость, |
с-1 |
|
98; |
продолжительность пуска, с |
|
1.1. |
|
Двигатель типа 4АНК180S6У3 |
(см. пример 1) |
||
Коэффициент полезного действия преобразователя, % |
80. |
||
Определим средний момент двигателя
M ср,д = 1*98/1.1 + 133 = 222 Н*м.
Коэффициент, учитывающий жесткость механической характеристики на рабочем участке
ks.a = 133/0.064 = 2080 Н*м.
Потери при пуске составят
A = 2222/2080*104.7*(1+0.363/0.597)*1.1 = 4390 Дж
Работа, совершаемая за время пуска равна
A = 133*98*1.1/2 = 7170 Дж.
Приращение кинетической энергии
Wкин = 1/2*982= 4800 Дж.
В системе ДПЧ с неуправляемым выпрямителем
Коэффициент мощности Км = 0.887. Потребляемая активная энергия
Wa = (4390 + 7170 + 4800)/(0.887*0.8) = 23100 Дж.
Коэффициент полезного действия привода в пусковом режиме
= 7170/23100*100 = 31 %.
В системе НПЧ
Коэффициент мощности равен
km = (0.2 + (0.81 – 0.6)*(222/133)1/2)*0.6 = 0.283.
Активная энергия, потребляемая приводом
Wa = (4390 +7170 + 4800)/0.8 = 20500 Дж.
Активная средняя мощность, потребляемая из сети
P1,ср = 20500/1.1 = 18700 Вт.
Средняя реактивная мощность равна
Q1,ср = 18700*((1/0.2832 – 1))1/2 = 6340 В*Ар Коэффициент полезного действия
=7170/20500*100 = 35 %.
6.3.Расчѐт энергетических показателей привода в установившемся режиме работы
Мощность потерь в двигателе согласно /4/ можно определить из выраже-
ния
pсум pС1Н f* M С 1Н Sa (1 R1 R2 ) . |
(6.10) |
В системе ДПЧ-АД с неуправляемым выпрямителем потребляемая активная энергия равна
Wа (P2 |
pсум ) (kМ пч ) tП . |
(6.11) |
В системах других структур потребляемая активная энергия
Wа (P2 |
pсум ) пч tП . |
(6.12) |
Коэффициент мощности определяется по формуле (4.21). ПРИМЕР 10