

Р.Р. Абулханов
АНАЛИЗ МЕТОДОВ И СРЕДСТВ ЗАЩИТЫ
ОТ УГРОЗ НАРУШЕНИЯ «ЗАЩИЩЕННОСТИ» ПРИКЛАДНОГО ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Рассматривается анализ существующих методов и средств защиты от угроз нарушения «защищенности» прикладного программного обеспечения
В контексте угроз динамического нарушения целостности прикладных программ можно выделить следующие методы защиты от угроз активизации враждебного кода (ВК), которые позволяют повысить «защищенность» прикладного программного обеспечения АСУ от соответствующего класса программных атак:
методы предварительного контроля, используемые на этапе проектирования и создания программ;
методы контроля в процессе эксплуатации программ.
В свою очередь, обе группы методов включают статические и динамические методы контроля. Статические методы осуществляют, как правило, контроль целостности программ до момента выполнения, а динамические – в процессе выполнения прикладных программ. Классификация методов контроля безопасности выполнения прикладных программ представлена на рис. 1.
Руководящий документ «Защита от несанкционированного доступа к информации (Ч.асть 1. Программное обеспечение средств защиты информации. Классификация по уровню контроля отсутствия недекларированных возможностей)» разработан в дополнение к основным документам ГТК и устанавливает классификацию программного обеспечения средств защиты информации по уровню контроля отсутствия в нем недекларированных возможностей [1].
Недекларированными возможностями называются функциональные возможности программного обеспечения, не описанные или несоответствующие описанным в документации, при использовании которых возможно нарушение конфиденциальности, доступности или целостности обрабатываемой информации [1].
В соответствии с требованиями этого документа, все программное обеспечение средств защиты информации (СЗИ), в том числе системных и встроенных в прикладные программы, должно подвергаться статическому и динамическому анализу исходных текстов программ.
Статический анализ представляет собой совокупность методов контроля, основанных на структурном анализе и декомпозиции исходных текстов программ.
Рис. 1. Классификация методов контроля безопасности выполнения прикладных программ
Динамический анализ – совокупность методов контроля функциональных возможностей программного обеспечения, основанных на идентификации фактических маршрутов выполнения функциональных объектов с последующим сопоставлением с маршрутами, построенными в процессе проведения статического анализа.
Под функциональным объектом подразумевается элемент программы, осуществляющий выполнение действий по реализации законченного фрагмента алгоритма программы [1]. Функциональными объектами могут быть процедуры, функции, ветви, операторы и т.п.
В настоящее время существуют две основные группы методов контроля безопасного выполнения прикладных программ осуществляемых в процессе эксплуатации программного обеспечения (ПО), на основе которых строятся средства защиты от программных атак, реализующих угрозу активизации ВК - статические и динамические.
Статические методы предполагают проверку исполняемой программы до начала выполнения, а динамические - контроль правильности выполнения программы.
К статическим относятся следующие методы контроля.
Контроля целостности, включающие контроль целостности кода системного ПО и контроль целостности конфигурации системы защиты. Если внедренная в систему программная закладка (ПЗ) модифицирует системное ПО, она будет выявлена при ближайшей проверке целостности кода (поскольку ПЗ может модифицировать системное ПО не только на диске, но и в оперативной памяти (ОП), необходим контроль не только исполняемых файлов, но и их образов, загруженных в память). Если ПЗ внедрена в ПО системы защиты путем модификации ее конфигурации или интерфейсных связей, закладка также будет выявлена при ближайшей проверке их целостности. К статическим средствам защиты относятся также средства, контролирующие целостность файлов и ориентированные на защиту от воздействий вирусов.
Мониторинга потоков данных, которые могут быть использованы ПЗ в процессе функционирования и практически не используются легальным ПО. Например, если программа входа в систему (login в UNIX или Winlogon в Windows NT) обращается для записи к файлу, не являющемуся ее файлом конфигурации, то, скорее всего, в системе присутствует перехватчик паролей.
Перечисленные способы применимы в случае, когда программа еще не загружена в ОП или сразу после такой загрузки. В процессе же выполнения программы, когда наиболее вероятна атака активизации ВК, такие проверки не производятся.
К методам динамического контроля безопасности выполнения программ относятся следующие.
1. Контроль переполнения буфера, основанный на специально разработанных методах и средствах предупреждения и обнаружения атаки переполнения буфера. К ним относятся:
корректировка исходных кодов программы для устранения уязвимостей;
использование неисполнимых буферов;
применение проверок выхода за границы;
применение проверок целостности.
Корректировка исходных кодов программы для устранения уязвимостей.
Недостатки: применение метода возможно только на стадии разработки; не решают проблему в принципе, а лишь минимизируют число уязвимостей по переполнению буфера.
Средства: специально разработанные методики программирования.
Использование неисполнимых буферов.
Недостатки: ограничение на исполнение данных приводит к проблеме несовместимости; защита с использованием неисполнимых буферов предотвратит только атаки с внедрением кода, но не поможет при других видах атак с использованием переполнения буфера.
Средства: компилятор.
Применение проверок выхода за границы
Недостатки: реализованные проверки ограничены только точными ссылками на элементы массивов, но не производятся для указателей; значительное (до 30 раз) снижение производительности программы.
Средства: компилятор.
Применение проверок целостности.
Программный продукт StackGuard предназначен для защиты от всех атак по переполнению буфера с изменением адреса возврата из функции.
Программный продукт PointGuard предназначен для защиты от атак на указатели функций. Недостаток: PointGuard не сможет защитить от атак с искажением указателей данных.
Программный продукт StackShield. выполняет защиту от атак с искажением адреса возврата и указателей функций. Недостаток: проблема несовместимости с программами, которые содержат исполняемый код в области данных и стека. Достоинство: защита StackShield практически не сказывается на производительности программы.
2. Эвристические методы. Основаны на использовании эвристического анализа, чаще всего применяются в средствах антивирусной защиты и позволяют контролировать прикладные программы в момент их выполнения.
3. Метод программной изоляции ошибки. Программная изоляция ошибки это метод создания java-подобных ограниченных сред для динамической загрузки произвольных кодов. Эта технология работает на уровне трансляции кода и представляет собой комбинацию статического анализа и динамических проверок. Система выделяет каждому модулю свое отдельное пространство памяти, в котором он существует как изолированная часть большой программы. Статические проверки гарантируют, что все изменения происходят в пределах одного модуля, а все внешние обращения были связаны лишь с разрешенными функциями.
Динамические проверки вставлены в каждую загрузку, сохранение и динамический переход, чтобы гарантировать, что программа не вышла за пределы отведенного статическим анализом ограниченной среды и выделенной памяти. Недостаток этого метода - низкая производительность работы. Достоинства - предотвращение выполнения произвольного кода при переполнении буфера и возможность безопасного выполнения произвольных модулей.
4. Ограничение состояний. Метод ограничения состояний выполняет статический анализ программы, путем создания абстрактной, недетерминированной модели функций и системных запросов. Во время выполнения всех программ системные вызовы сравниваются с имеющимися шаблонами. И если какая-то программа предпринимает попытку системного вызова, не предусмотренного в ее описании, то предполагается, что произошло вторжение, нарушившее корректную работу программы, и подозрительные действия блокируются.
Достоинства – полное отсутствие ложных тревог. Недостатки - значительный объем обрабатываемой информации (затраты системных ресурсов, большое время обработки) и неспособность обрабатывать многозадачные программы без явного механизма обнаружения местонахождения переключаемых потоков.
5. Выверенный уровень доступа. Метод предполагает наличие у каждого системного вызова своего уровня доступа в соответствии с политикой безопасности. Пользователь имеет соответствующий доступ на этот вызов и в программе реально существует код, способный сделать этот вызов. Дополнительные проверки доступа могут определить, когда стеку и динамической памяти разрешено содержать выполнимый код. Большинство программ не имеет никакой необходимости генерировать динамический код. Таким образом, можно устранить возможность проведения практически любых типов атак, использующих буфер, в том числе и переполнение.
Такой метод требует многочисленных изменений в операционной системе. Почти каждый системный вызов должен соответствовать определенной политике безопасности. Недостаток – такая система трудно изменяется и модернизируется.
Этот недостаток компенсируется тем, что используется отдельная область операционной системы (сервер защиты) – которая занимается проверкой на безопасность. Когда требуется проверить, позволена ли вызываемая команда, запрашивается сервер защиты, чтобы определить, как текущая политика безопасности рассматривает это действие. В случае положительного решения работа программы продолжается, в противном случае – прерывается. Так обеспечивается максимальная гибкость и довольно высокий уровень защиты. В свою очередь, недостатком этого подхода является то, что данный механизм должен быть встроен непосредственно в саму ОС и политика безопасности должна быть составлена и настроена очень тщательно.
6. Контроль правильности выполнения соседних актов алгоритма. Контроль правильности выполнения соседних актов алгоритма осуществляется для каждой пары последовательно выполняемых команд. Избыточная информация (контрольный код), добавляется к слову каждой команды таким образом, чтобы при правильном выполнении алгоритма, контрольный код последующей команды определялся контрольным кодом предыдущей команды и состоянием устройства управления.
7. Контроль правильности выполнения протяженных участков. При контроле протяженных участков алгоритма он разбивается на фрагменты, каждый из которых имеет один вход и один или несколько выходов. В любом случае, основу каждого фрагмента составляют линейные участки, которые определяются как наборы строго последовательных команд. Выполнение этого набора всегда начинается в точке входа и заканчивается в точке выхода. Границы линейных участков определяются командами передачи управления, точками слияния ветвей алгоритма, а также символическими блоками «начало» и «конец». В качестве характеристики последовательности акта линейного участка алгоритма может использоваться: контрольная сумма, количество актов алгоритма, CRC – код, хеш – образ.
Подход, основанный на проверке правильности выполнения протяженных участков алгоритма, наиболее перспективен, так как он позволяет обнаружить нарушения, вызванные не только случайными причинами, но и умышленными деструктивными воздействиями.
Контроль правильности выполнения соседних актов алгоритма и контроль правильности выполнения протяженных участков используются в основном для решения задачи контроля правильности функционирования объектов и средств криптографической защиты. Как правило, объект представляется его алгоритмической моделью. В этом случае контроль основан на проверке соответствия последовательности выработки управляющих сигналов или фактической очередности исполнения актов алгоритма (выборки команд).
Контроль осуществляется на аппаратном уровне с помощью специального оборудования – сторожевого процессора (рис. 2).
Сторожевой процессор обеспечивается некоторой избыточной информацией, характеризующей верное выполнение алгоритма. В процессе работы сторожевой процессор собирает информацию о действительном ходе выполнения программы и сравнивает ее с заданной. В случае несовпадения, сторожевой процессор формирует сигнал ошибки, который может вызвать прерывание работы компьютерной системы.
Достоинства аппаратного контроля выполнения программ: работа в реальном масштабе времени; отсутствие ложных срабатываний; обнаружение любых отклонений от алгоритма.
Недостатки: программное обеспечение должно разрабатываться специальным образом; необходимость хранения избыточной информации в памяти сторожевого процессора, что накладывает ограничения на количество контролируемых программ.
Поэтому, такой контроль используется только в случае программного обеспечения, предназначенного для реализации криптозащиты, но не используется в случае с прикладными программами.
Рис. 2. Контроль выполнения программ с использованием
сторожевого процессора
Статические проверки программ на наличие ВК и контроль целостности программ, осуществляемые известными в настоящее время средствами защиты, не обеспечивают необходимой степени защиты от атак активизации ВК. Следовательно, в дальнейшем целесообразно рассматривать только динамические методы.
В комплексе средств защиты информации (КСЗИ) АСУ средства, использующие методы динамического контроля, представлены только базовой системой управления доступом и модулем антивирусной защиты. Все эти средства позволяют обнаруживать несанкционированные действия только после их совершения или на стадии выполнения ВК, что может привести к непоправимым последствиям. Следовательно, защита от такой программной атаки, как активизация ВК имеет недостатки.
Так как наибольший процент всех программных атак составляют атаки, позволяющие несанкционированно запустить исполняемый код, а основным способом, позволяющим это сделать, является механизм переполнения буфера. Следовательно, типовой КСЗИ, не обеспечивает защиты от самого многочисленного класса атак.
Кроме того, все существующие в КСЗИ средства контроля выполнения программ имеют возможность только фиксировать факт НСД к программам и файлам, а также осуществлять статический контроль целостности файлов и защиту от известных типов вирусов. В большинстве случаев успешных атак проводимая атака оказалась ранее неизвестной. С точки зрения эффективности защиты, время обнаружения момента активизации ВК должно быть как можно меньше. Обнаружив момент активизации ВК можно предотвратить деструктивные воздействия на информацию.
В результате проведенного анализа выявлено отсутствие в КСЗИ такого способа защиты, который бы позволял в полной мере осуществлять контроль за правильным выполнением программ с приемлемой скоростью. Существующие в настоящее время динамические методы обнаружения ВК не перекрывают весь диапазон возможных реализаций программных атак и, как правило, требуют значительных вычислительных ресурсов.
В связи с этим актуальной является задача создания системы контроля безопасного выполнения прикладных программ, которая обеспечивала бы обнаружение моментов активизации ВК в реальном масштабе времени, независимо от типа программной атаки, выбранной злоумышленником.
Литература
Администратор безопасности сети. СПб.: Негосударственное образовательное учреждение повышения квалификации «Научно-информационный центр проблем безопасности», 2000. Ч. 1.
Воронежский государственный технический университет
УДК 624.156
М.А. Исаенко, Л.С. Очнева, Н.Э. Самойленко
ИЗМЕРИТЕЛЬ КОМПЛЕКСНОГО ИМПЕДАНСА
Изложен пример реализации измерителя комплексного импеданса, выполненного на современной элементной базе. Прибор позволяет проводить измерения на частотах от единиц килогерц, что открывает широкие возможности для анализа комплексных параметров цепей
В ряде случаев в технике, медицине и научных исследованиях требуется измерение модуля и фазы комплексного сопротивления различных узлов и датчиков. В частности, измерения импеданса проводятся для обнаружения коррозии, при биометрических исследованиях и исследованиях свойств материалов, электрохимических анализах крови.
В электронике и электротехнике измерения импеданса проводятся в следующих случаях:
- при исследовании резонансных характеристик фильтров и колебательных контуров при:
анализе качества проводных линий связи;
проверке качества диэлектриков конденсаторов и оценки их пригодности к работе в определенном диапазоне частот;
- проверке качества катушек индуктивности, дросселей, трансформаторов (оценка потерь в сердечнике на определенных частотах, обнаружение короткозамкнутых витков и др.);
- измерении значения емкости, индуктивности, активного сопротивления радиоэлементов с неизвестными параметрами.
Перечисленные задачи предъявляют к измерителю импеданса ряд требований, основными из которых являются:
возможность установки частоты измерения (рабочей частоты) до 200 кГц;
возможность перестройки частоты измерения с малым шагом (100 Гц и менее);
широкий диапазон измерения (от 102 до 106 Ом);
погрешность измерения, не превышающая 5 %;
легкость настройки и калибровки;
возможность подключения к персональному компьютеру, ноутбуку, карманному компьютеру для запоминания и обработки результатов
Большинство измерителей, представленных на рынке, малопригодны для проведения исследований и ориентированы только на определение параметров радиоэлементов на нескольких заранее заданных частотах. В частности, измеритель импеданса Е7-15 может с высокой точностью проводить измерения лишь на двух частотах - 100 Гц и 1 кГц. Частоты преобразования современных импульсных источников питания лежат в диапазоне от 20 103 до 106 Гц, поэтому, измеряя таким прибором параметры трансформаторов и дросселей для них, можно получить малополезную, а в ряде случаев ошибочную информацию. Измеритель Е7-15, как и его аналоги, имеет относительно большие габариты и массу, не имеет средств подключения к вычислительной технике и питается только от сети 220 В. Современные измерители импеданса зарубежного производства, в частности 4234, 4235 фирмы Wayne Kerr Electronics, лишены большинства указанных недостатков, однако из-за слишком высокой цены и больших габаритов не подходят для оснащения учебных и радиолюбительских лабораторий, а также для работы в "полевых" условиях.
В настоящее время выполнить высокие требования, предъявляемые к измерителю импеданса, можно с помощью методов дискретного преобразования Фурье (ДПФ) и связки "микроконтроллер - цифровой сигнальный процессор (DSP) - синтезатор частоты". Общая структурная схема измерителя с применением ДПФ изображена на рис. 1.
Сигнал с синтезатора частоты, проходя через масштабирующий буферный усилитель и усилитель-преобразователь (каскад с коэффициентом передачи, зависящим от импеданса подключенного датчика), поступает на быстродействующий АЦП, а затем на сигнальный процессор, производящий вычисление ДПФ. Результаты ДПФ передаются в микроконтроллер, выполняющий следующие основные функции:
- управление синтезатором частоты;
- управление усилителем-преобразователем для поддержания сигнала на его выходе в рабочем диапазоне АЦП;
управление масштабирующим буферным усилителем;
вычисление модуля и фазы импеданса на основе результатов ДПФ;
реализация обмена данными с ЭВМ, индикатором и клавиатурой.
Усилитель-преобразователь в простейшем случае представляет собой инвертирующий усилительный каскад (рис. 2).
Приведенная структурная схема предполагает использование сигнального процессора для вычисления одночастотного ДПФ, т.е. такого преобразования, при котором осуществляется анализ сигнала на единственной частоте, заданной синтезатором частоты. Для одночастотного ДПФ используются опорные сигналы (на рис. 1 показаны стрелками COS, SIN) с разностью фаз 90° и частотой, совпадающей с выходной частотой синтезатора частоты.
Практическая реализация схемы, представленной на рис. 1 в настоящее время не вызывает трудностей в связи с наличием на рынке широкой номенклатуры сигнальных процессоров, микроконтроллеров, быстродействующих АЦП и др.
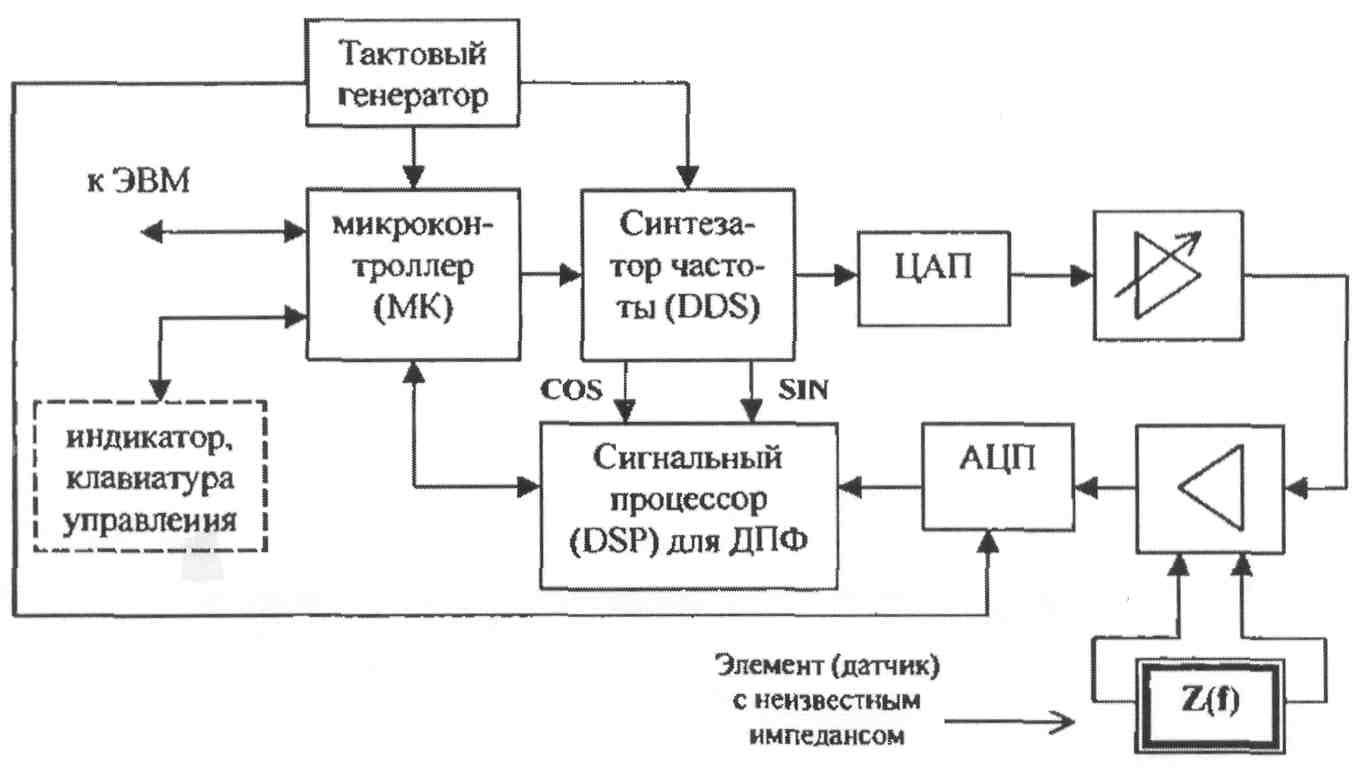
Рис. 1. Структурная схема измерителя с применением ДПФ
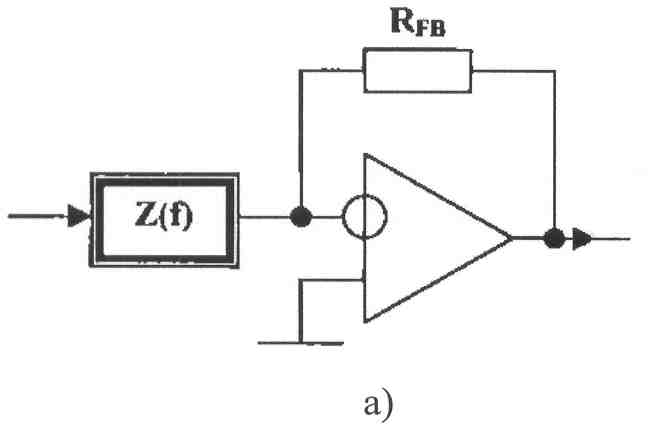

Рис. 2. Инвертирующий усилительный каскад двух видов
Схемотехника усилителя-преобразователя может быть различной в зависимости от частоты измерения, требуемой точности, диапазона измерения импеданса, способа подключения датчика относительно общего провода устройства. Однако реализация этой схемы может занять много времени, так как требует навыков программирования DSP и организации взаимодействия между DSP, управляющим микроконтроллером и синтезатором частоты. Кроме того, потребуется разработка сложной печатной платы, так как DSP выпускаются в многовыводных корпусах с малым шагом. В ряде случаев более удобным решением является использование готовых микросхем, специально предназначенных для измерения импеданса методом ДПФ, в частности микросхемы AD5933 фирмы Analog Devices [1], содержащей следующие узлы:
- внутренний тактовый генератор на частоту 16,8 МГц (имеется возможность подключения внешнего источника тактового сигнала);
- 27-битный синтезатор частот с максимальной частотой измерения 200 кГц. Минимальная частота зависит от тактовой частоты и составляет около 1 кГц при тактовой частоте 16 МГц;
- масштабирующий буферный усилитель со ступенчато изменяемым коэффициентом передачи (четыре ступени);
- встроенный операционный усилитель для реализации усилителя-преобразователя по схеме на рис. 2 а;
- 12-битный АЦП с дополнительным усилителем (PGA) на входе (коэффициент усиления составляет 1 или 5);
узел взвешивания данных с АЦП с использованием функции Хеннинга;
узел ДПФ (1024 точки);
термодатчик и узел интерфейса IС.
AD5933 питается от однополярного источника напряжением от 2,7 до 5,5 В и управляется по интерфейсу 1С, что очень удобно для портативной аппаратуры. Базовая погрешность измерения импеданса в типовой схеме включения составляет от 0,5 до 5 % в зависимости от значения импеданса, способа калибровки.
Реализовать измеритель импеданса с использованием принципа ДПФ и микросхемы AD5933 можно в виде относительно простого портативного устройства, подключаемого к компьютеру и не имеющего собственной клавиатуры и индикации.
Измеритель, выполненный на микроконтроллере Atmega8 фирмы Atmel, обеспечивает обмен данными с компьютером по интерфейсам RS-232 и USB, обмен данными с AD5933 по шине IС, а также переключение поддиапазонов измерения с помощью реле. Тактовая частота микроконтроллера и микросхемы измерителя стабилизируется кварцевым резонатором. Измеритель обладает следующими характеристиками:
частота измерения от 3 до 200 кГц;
диапазон измерения модуля импеданса от 1,5 102 до 8 106 Ом;
- число поддиапазонов - 6;
- погрешность измерения импеданса от 0,5 до 5 % в зависимости от поддиапазона, величины импеданса и амплитуды измерительного напряжения;
- диапазон измерения фазы импеданса - от минус 180° до 180°;
- диапазон измерения емкости - от 3 пФ до 0,2 мкФ;
- минимальная измеряемая индуктивность - 120 мкГн;
- ручной и автоматический выбор поддиапазона при измерении индуктивности и емкости;
двойная амплитуда (размах) измерительного напряжения от 0,25 до 2,52 В;
для связи с компьютером используются интерфейсы RS-232 и USB.
Для подключения измерителя к СОМ порту используется микросхема, формирующая требуемые уровни напряжений интерфейса RS-232. При работе через СОМ-порт требуется подключение внешнего источника питания напряжением 5 В ± 0,25 В и током нагрузки не менее 200 мА.
Подключение измерителя к порту USB осуществляется с помощью микросхемы FT232RL [2], которая представляет собой недорогой преобразователь USB-UART, требует при использовании минимума внешних компонентов и выполнена в удобном для ручного монтажа корпусе SSOP28. Драйверы, предоставляемые производителем, позволяют операционной системе видеть преобразователь как виртуальный СОМ-порт, поэтому программе-оболочке измерителя импеданса, работающей под управлением операционной системы Windows, все равно, по какому интерфейсу работать.
Усилитель-преобразователь прибора выполнен по схеме на рис. 2а с использованием встроенного в AD5933 операционного усилителя. Коэффициент преобразования, определяющий измерительный поддиапазон, задается внешними резисторами. Подключение нужного резистора осуществляется через контакты реле.
Внешний повторитель выполнен на микросхеме (AD8601), представляющей собой операционный усилитель с однополярным питанием и широким диапазоном входных и выходных напряжений (rail-to-rail amplifier). Развязка по постоянному току между повторителем и усилителем-преобразователем необходима при исследованиях индуктивностей и колебательных контуров обеспечивается включением в цепь конденсатора, который должен быть керамическим, с диэлектриком хорошего качества. Модуль импеданса такого конденсатора даже на минимальной частоте 3 кГц не превышает 2,5 Ом, поэтому существенной погрешности в измерения он не вносит.
Измеритель содержит два светодиода. Красный светодиод вспыхивает на короткое время при обмене данными через USB, зеленый - при успешном выполнении микроконтроллером команды с компьютера.
При измерении импеданса практически все расчеты выполняются компьютерной оболочкой на основе данных с AD5933 и калибровочных коэффициентов, хранящихся в EEPROM микроконтроллера. Каждый калибровочный коэффициент хранится в коде с дополнением до двух, занимает в памяти четыре байта и представляет собой 32-разрядное целое знаковое число.
При вычислении модуля импеданса сначала вычисляется калибровочный коэффициент Км (усиление по терминологии Analog Devices) на частоте измерения, а затем значение |Z| в соответствии с формулой
|Z|=![]() ,
,
где ZR и ZIM - действительная и мнимая части результата ДПФ AD5933 на частоте измерения (регистры микросхемы Real и Imaginary).
Нахождение Км основано на предположении, что эта величина меняется линейно в зависимости от частоты. В соответствии с рекомендациями Analog Devices сначала находят значения калибровочных коэффициентов на нижней и верхней частотах калибровки, для этого необходимы элементы с заранее известным импедансом, например прецизионные резисторы с малой паразитной индуктивностью. Для калибровки каждого поддиапазона измерений требуется элемент, у которого импеданс не меньше, чем у резистора, задающего коэффициент преобразования.
Рабочая программа для микроконтроллера Atmega8 написана на языке С для компилятора ICC v.6.3 la фирмы ImageCraft Creations [3].
Обмен данными между измерителем и компьютером осуществляется по принципу "запрос-ответ". Скорость обмена - 38400 бит/с.
Относительно небольшой набор команд и выбранное разделение функций между компьютером и измерительной приставкой дает возможность создать управляющую программу-оболочку в любой среде разработки, которая кажется пользователю наиболее подходящей (Borland C++, Lab View, CVI и других).
Литература
1. AD5933. IMSPS, 12 bit Impedance Converter, Network Analyzer. Электрон. дан. Режим доступа: http://www.analog.com/UploadedFiles/ Data_Sheets/ AD5933.pdf.
2. Описание микросхемы FT232R. - Электрон. дан. – Режим доступа: http://www.ftdichip.com/Products/ FT232R.htm.
3. Компилятор ICC v. 6.31а фирмы ImageCraft Creations. Режим доступа: http://www.imagecraft.com.
Воронежский государственный технический университет
УДК 624.156
А.В. Анохин, Л.С. Очнева, А.В. Пономарев, Н.Э. Самойленко
ГИДРОАКУСТИЧЕСКИЙ ПРИБОР
БЫТОВОГО НАЗНАЧЕНИЯ
Рассматриваются вопросы конструкторско-технологического проектирования навигационного прибора (эхолота), ориентированного на использование в качестве бытового прибора на рынке спортивной рыбной ловли, особенности его структуры и функционирования для эффективного поиска объектов
Эхолот – навигационный прибор, предназначенный для автоматического измерения глубины водоемов с помощью гидроакустических эхо-сигналов, определения рельефа дна, а также для поиска затонувших предметов и мест скопления рыб. Слово эхолот - это сокращение трех английских слов: звук, передвижение, расположение. Первоначально, во время Второй Мировой войны, эхолот создавался как средство для борьбы с вражескими подводными лодками. Потом он освоил мирную профессию. Началом новой индустрии в производстве этих приборов можно считать 1957 г., когда на рынок спортивной рыбной ловли был выпущен первый сонар на полупроводниковых элементах. В 1959 г. фирма "Lowrance" предложила "Маленький зеленый ящик" ("The Little Green Box"), который быстро стал самым популярным сонаром в мире. Полностью построенный на транзисторах, он стал первым успешным эхолотом для спортивной ловли, производился вплоть до 1984 г. и за эти годы его выпуск составил около 1 млн. штук.
Основными узлами сонара являются передатчик, преобразователь (ультразвуковой датчик, являющийся одновременно передающей антенной, излучающей ультразвуковые сигналы, и приемной антенной, принимающей отраженные ультразвуковые сигналы), усилитель и экран. Задача электронной начинки эхолота - измерить время от момента излучения зондирующего звукового импульса до его возвращения к приемнику после отражения от подводного объекта.
Сигналы, приходящие в разное время от различных объектов, отображаются на экране эхолота. Чем больше глубина объекта под водой, тем дольше время движения эхо-сигнала.
Чтобы считаться хорошим, сонар должен иметь:
- передатчик большой мощности;
эффективный преобразователь;
чувствительный приемник;
дисплей высокого разрешения.
Все части системы должны быть спроектированы для совместной работы при любых погодных условиях и при любых температурах.
Большая мощность передатчика гарантирует возможность получения нормального эхо-сигнала даже с больших глубин и при плохом состоянии воды.
Преобразователь это антенна эхолота. Он преобразовывает электрическую энергию от передатчика в звуковую волну высокой частоты. Звуковая волна от преобразователя путешествует через воду и назад, отразившись от любого объекта в воде. Когда отраженный сигнал попадает назад в преобразователь, он преобразовывает звук в электрическую энергию, которая посылается приемнику эхолота. Частота преобразователя должна соответствовать частоте звукового приемника эхолота. Другими словами, нельзя использовать преобразователь 50 кГц на звуковом приемнике, предназначенном для 192 кГц. Преобразователь должен быть способен проводить мощные импульсы передатчика, преобразовывая электрические импульсы в звуковые с минимальными потерями мощности. В то же самое время он должен быть достаточно чувствительным, чтобы принять самые слабые из отраженных сигналов. Все это относится к определенной установленной частоте, и при этом преобразователь должен игнорировать эхо-сигнал, приходящий на других частотах. Другими словами, преобразователь должен быть очень эффективен.
Приемнику приходится работать с сигналами в очень широком диапазоне уровней. Он должен подавлять сигналы очень большой амплитуды во время работы передатчика и усиливать очень слабые электрические сигналы, которые возникают, когда возвращающийся эхо-сигнал достигает преобразователя.
Дисплей должен иметь высокое разрешение (вертикальные пиксели) и хороший контраст, чтобы показывать подводный мир детально и ясно. Это позволяет видеть дуги рыбы и мелкие подробности дна.
Большинство современных эхолотов оперирует на частоте 192 кГц, некоторые используют 50 кГц. Есть свои преимущества у каждой частоты, но почти для всех состояний пресной воды и большинства состояний соленой воды, 192 кГц - лучший выбор. Эта частота дает лучшие подробности, работает лучше всего в неглубокой воде и на скорости, и обычно дает меньшее количество "шумовых" и нежелательных отражений. Определение близлежащих подводных объектов, также лучше на частоте 192 кГц. Это способность отобразить две рыбы как два отдельных эха вместо одной "капли" на экране.
Существуют некоторые условия, при которых частота 50 кГц лучше. Как правило, эхолоты, работающие на частоте 50 кГц (при тех же самых условиях и мощности) могут проникать более глубоко через воду. Это происходит из-за естественной способности воды поглощать звуковые волны. Скорость поглощения больше для более высоких частот звука, чем для более низких частот. Поэтому 50 кГц эхолоты находят использование в более глубокой соленой воде. Также, преобразователи 50 кГц эхолотов имеют более широкие углы обзора, чем преобразователи 192 кГц эхолотов.
Основные характеристики и функции эхолотов:
- максимальная глубина измерения;
- чувствительность - регулирует способность эхолота принимать отраженный сигнал. Низкий уровень чувствительности исключает возможность отображения детальной информации о дне, отражениях рыбы и другой информации об объектах. Высокий уровень чувствительности позволяет видеть эти детали, но это может привести к выводу на экран помех и множества нежелательных сигналов;
- функция улучшенной обработки сигнала (ASP), благодаря которой производится автоматическая перенастройка эхолота при изменении скорости движения лодки, состояния воды и т.п. ASP - это встроенная система фильтрации помех. Она постоянно анализирует скорость лодки, условия на воде и интерференцию и автоматически обеспечивает лучшую видимость на экране при различных ситуациях. Фильтр помех - эффективное средство против "помех". В терминологии эхолотов, "шум" - это любой нежелательный сигнал. Он вызывается электрическими и механическими приборами, такими, например, как трюмная помпа, система зажигания двигателя, проводами, пузырьками воздуха у поверхности датчика и даже вибрацией от приборов. В любом случае "шум" приводит к появлению нежелательных "помарок" на экране. Как правило, есть четыре уровня ASP - "Отключено", "Низкий", "Средний" и "Высокий". ASP устанавливает чувствительность настолько высокой, насколько возможно, с учетом отсутствия "шума" на экране;
функция формирования звуковых сигналов. Существует три предупреждающих сигнала. Первый — "рыба", он раздается, если функция определяет сигнал или группу сигналов как рыбу. Второй – попадание в указанную зону, он раздается, если в зоне, определяемой полоской сигнала предупреждения, обнаруживается объект. Третий - сигнал, предупреждающий о глубине. У него есть установки "отмель" и "глубина". Этот сигнал инициируется только сигналами датчика от дна, и полезен, если нужно следить за якорем или за отмелями при навигации;
скорость отражения сигнала на экране - это скорость прокрутки экрана. По умолчанию она устанавливается максимальной;
функция идентификации рыбы (FISH ID) - "распознаватель" рыбы. Функция FISH ID объекты, удовлетворяющие некоторым условиям, отождествляет с рыбами. Микрокомпьютер анализирует все сигналы и игнорирует помехи от дна, термоклин, прочие нежелательные сигналы. В большинстве случаев все оставшиеся объекты являются рыбами. Рыбы изображаются символами, а не реальными очертаниями. Есть несколько типов символов рыб, разные для рыб разных размеров. Они показывают относительные размеры объектов. Другими словами, на экране изображается значок-символ маленькой рыбы, если с точки зрения прибора объект - это маленькая рыба, значок-символ средней рыбы, если объект больше, и т.д. Микрокомпьютер - прибор высокой сложности, но он может быть введен в заблуждение. Он не может различить плавающие объекты (черепахи, затопленные предметы, пузырьки воздуха). Тяжелее всего прибору отличать от рыб отдельные ветки, оторвавшиеся от больших веток. На экране могут возникать обозначения рыб там, где рыбы нет, бывает и наоборот;
функция "GRAYLINE" - "серая линия" обеспечивает возможность различать твердые и мягкие предметы. Она помечает серым объекты, сигнал от которых сильнее, чем установленный уровень. Это позволяет различать твердое дно от мягкого. Например, мягкое, илистое, заросшее травой дно дает слабый сигнал, который изображается узкой линией, без серого цвета. Твердое дно дает сильный сигнал, который рисуется широкой серой линией. Если у Вас есть два объекта одинакового размера, один серого цвета, а другой нет, то сигнал от серого сильнее. Это помогает отличить рыбу от элемента рельефа, водоросли от деревьев.
Простые модели эхолотов имеют датчик с одним зондирующим лучом. Простота конструкции не предусматривает никакого расширения возможностей, и предназначены такие модели, прежде всего для отображения глубины. Индикация наличия рыбы в этих моделях достаточно условная.
На следующих ступенях в иерархии эхолотов стоят однолучевые модели с графическим дисплеем, которые разворачивают показания глубины во времени и показывают рельеф дна по пройденному пути. Однако эхолота с таким датчиком более чем достаточно для поиска ям, перекатов, гряд и просмотра особенностей рельефа дна. Искать же рыбу эхолотом с таким датчиком малоэффективно, т.к. в зону "зрения" луча попадает мало объектов.
Более сложные модели имеют датчики с двумя или тремя зондирующими лучами. Суммарный угол обзора датчика такого эхолота достигает от 45° до 90° градусов, они захватывают большую площадь дна и становятся более эффективными в поиске рыбы. Практически все подобные модели предназначены для установки на лодке и позволяют подключать дополнительные датчики скорости температуры и даже синхронизироваться с GPS приемником.
К наиболее "продвинутым" моделям из двух - трехлучевой группы возможно подключение датчика бокового обзора. Он имеет два зондирующих луча, распространяющихся в стороны от основной зондирующей зоны.
Для эксплуатации трехмерных эхолотов используется шестилучевой датчик. Эхолот с таким датчиком позволяет более подробно отобразить расположение подводных объектов и неровности дна, представляя все данные в виде трехмерной картинки.
Особняком стоят сканирующие эхолоты, работающие по принципу радара. Они интересны тем, что в зоне ответственности, угол которой примерно равен 90 градусам, работает узконаправленный пучок, сканирующий пространство. Таким образом, эхолот исследует пространство впереди судна и заранее показывает наличие подводных объектов или рыбы. Для обработки полученных эхо-сигналов применяются технологии очень похожие на те, которые используются при компьютерной томографии. Плюс к этому приборы имеют и второй луч, направленный вниз, в толщу воды, который работает и отображает информацию аналогично обычному эхолоту и позволяет детально исследовать структуру дна и искать рыбу.
Существуют два основных типа излучателей: магнитостриктные и керамические. Магнитостриктные излучатели используются в мощных, но низкочастотных устройствах. Достоинством такого типа излучателей является практически неограниченная мощность и надежность при перегрузке. Керамические излучатели способны работать с импульсами очень высокой частоты, нежели магнитостриктные. Низкочастотные керамические излучатели весьма дороги, а при подаче к ним слишком большой мощности, они могут быть повреждены.
Предлагаемый эхолот измеряет глубину водоемов до 25 м. Минимальная измеряемая глубина - 0,3 м. Погрешность измерения не более 0,1 м.
Предусмотрена временная автоматическая регулировка усиления (ВАРУ), изменяющая коэффициент усиления в течение каждого цикла от минимального до максимального значения, что повышает помехоустойчивость прибора.
В качестве индикатора используется семисегментные индикаторы. Период обновления информации на индикаторе 0,1 с, что позволяет легко отслеживать рельеф дна. Дополнительно повышает помехоустойчивость, защищая от случайных помех, программно реализованный импульсный фильтр. Питание эхолота осуществляется от источника напряжением 9 В. Работоспособность прибора сохраняется при снижении напряжения до 6 В, потребляемый ток не превышает 20 мА в режиме измерения.
В эхолоте предусмотрена возможность регулировки эффективности ВАРУ. Импульсный фильтр при необходимости может быть отключен. Значения всех параметров могут сохраняться в памяти в режиме пониженного энергопотребления "SLEEP". В этом режиме потребляемый ток составляет не более 70 мкА, что практически не сказывается на сроке службы элемента питания.
Прибор состоит из четырех функционально законченных блоков: генератора зондирующих импульсов, блока управления, приемника и блока индикации.
Задающий импульсный генератор имеет частоту 600 КГц, которая затем делится на два триггером. Усилитель мощности излучаемого сигнала выполнен по двухтактной схеме на составных транзисторах и трансформаторе, с вторичной обмотки которого электрические колебания частотой 300 КГц подаются на пьезокерамический излучатель - датчик и в виде ультразвуковых посылок излучаются во внешнюю среду.
Разрешающий импульс длительностью 50 Мкс поступает на генератор в начале каждого цикла измерения с блока управления. Основа блока - однокристальный микроконтроллер АТ89С2051, который формирует все сигналы, необходимые для работы прибора.
Отраженный от дна сигнал принимается в промежутке между посылками излучателем - датчиком и подается на вход приемника в соответствии. Импульс усиливается трехкаскадным резонансным усилителем и детектируется. Триггер Шмитта формирует стандартные логические уровни. Диоды защищают вход приемника от перегрузки.
В блоке индикатора импульсы с выхода микропроцессора схемы управления поступают на счетчик импульсов. Счетчик импульсов включает в себя три однотипных узла пересчета. В нулевое состояние его устанавливает фронт тактового импульса, поступающего со схемы управления. Устанавливается ток через элементы индикатора, равный 20 мА, при таком токе индикатор хорошо виден в любую погоду.
С помощью кнопок переключателей осуществляется оперативное изменение режимов работы эхолота. После включения питания на индикаторе высвечиваются показания глубины водоема, в случае, если излучатель погружен в воду. Однократное нажатие на кнопку "SELECT" переключает прибор в режим установки степени ВАРУ, которая индуцируется численным показанием на дисплее в зависимости от степени усиления нажатия. Включенное состояние импульсного фильтра отображается цифрой "1" на индикаторе, выключенное — "0". Нажав кнопку "SELECT" еще раз, можно, с помощью соответствующих кнопок, увеличить или уменьшить скорость отображения информации на экране, которая индуцируется численным показателем на дисплее в зависимости от скорости обновления экрана. Следующее нажатие кнопки "SELECT" возвращает прибор в основной режим измерения.
Воронежский государственный технический университет
УДК 624.156
Л.С. Очнева, Н.Э. Самойленко, Е.Ю. Туковская
АКТИВНЫЙ САБВУФЕР С УСИЛИТЕЛЕМ
СВЕРХНИЗКОЙ ЧАСТОТЫ
Рассматриваются вопросы конструкторско-технологического проектирования активного сабвуфера, рассчитанного на воспроизведение самых низких басов, не входящих в диапазон частот работающих совместно с широкополосных акустических систем
Сабвуферам сегодня уже нет нужды доказывать свое право на существование: они стали неотъемлемой частью любой приличной системы домашнего театра, все чаще встречаются они и в составе «обычных» Hi - Fi - стереосистем, прекрасно дополняя своим мощным басом чуть легковесное звучание малогабаритных «полочных» громкоговорителей. Применение одной большой низкочастотной колонки на всю систему делает её более компактной, снижает стоимость.
Активный сабвуфер обычно используется в широкополосных акустических системах, рассчитанных на просмотр современных насыщенных спецэффектами фильмов и прослушивание современной музыки (особенно электронной), для воспроизведения самых низких басов. Так как активный сабвуфер используется для воспроизведения звука в домашних условиях, существует необходимость в соблюдении массогабаритных показателей. Внешний вид сабвуфера должен удовлетворять современным требованиям технической эстетики по форме и цветовому решению, кроме того, подбирая подходящее место для сабвуфера, можно попытаться погасить низкочастотные стоячие волны, неизбежно возникающие в небольшом замкнутом помещении [1].
В основе работы сабвуфера лежат принципы ограничения полосы пропускания и усилителя и усиления по мощности отфильтрованной низкочастотной части спектра звукового сигнала.
В состав сабвуфера входит источник питания, полосовой фильтр и усилитель звуковой частоты (УЗЧ).
Питание сабвуфера осуществляется от сети 50 Гц, 220 В. Выпрямленное и отфильтрованное выходное напряжение источника питания составляет ± 35 В, ±15 В.
Входная цепь состоит из микшера и делителя напряжения, образуемая резисторами, потенциометром и буферным повторителем. С помощью потенциометра устанавливается выходной сигнал низкочастотного громкоговорителя на желаемый уровень. На операционном усилителе, конденсаторах и резисторах собран фильтр высоких частот (ФВЧ) с крутизной 12 дБ на октаву, частота среза этого фильтра составляет около 34 Гц, а также дополнительный RС-фильтр высокой частоты с крутизной 6 дБ на октаву и частотой среза примерно 20 Гц. На операционном усилителе собран фильтр низких частот (ФНЧ) с крутизной 12 дБ на октаву с частотой среза 150 Гц. ФВЧ и ФНЧ, включенные последовательно, образуют полосовой фильтр.
Отфильтрованная низкочастотная часть спектра звукового сигнала поступает на усилитель звуковой частоты. Частота среза от 50 до 100 кГц ФНЧ защищает входные цепи усилителя от помех мощных телерадиовещательных станций и сигналов, наведенных с выхода усилителя за счет положительной обратной связи. Соотношением величин сопротивлений задается коэффициент усиления усилителя мощности звуковых частот, усиление по напряжению составляет около 30 дБ, что является оптимальным значением
С выхода усилителя через сопротивление нагрузки на землю протекает большой ток, и может так случится, что этот ток, протекая по «земляному» проводнику, пройдет и через тот участок, по которому течет входной ток (от источника сигнала, через вход и далее обратно к источнику по «земле»), поэтому на сопротивлении «земляного» провода будет появляться напряжение, которое сложится с входным напряжением. Таким образом, выходной сигнал усилителя попадет на вход, причем эта обратная связь является недопустимой. Для устранения такого явления включается резистор, сопротивление которого намного больше, чем сопротивление земляного проводника, и через него (резистор) во входную цепь попадет в сотни раз меньший ток, чем при его отсутствии.
В принципиальной электрической схеме предусмотрена тепловая защита УНЧ. При достижении температуры кристалла + 145 °С блок защиты переводит микросхему в режим «MUTE», а при достижении + 150 °С - в режим «STANI - BY». Цепочка RC и диод управляют режимами «MUTE» и «STAND - BY» при включении и выключении питания, они обеспечивают правильную последовательность включения и выключения этих режимов.
При разработке конструкции активного сабвуфера необходимо учитывать основные данные о назначении, конструктивно - технологических ограничениях и условиях эксплуатации изделия, а также следующие общие требования:
простота обслуживания;
достаточно высокая надежность;
ремонтопригодность;
унификация и стандартизация конструктивных элементов;
приемлемая себестоимость изделия.
Сабвуфер предназначен для работы в помещениях, где колебания температуры и влажности воздуха несущественно отличаются от колебаний на открытом воздухе и имеется свободный доступ наружного воздуха, то есть изделие будет эксплуатироваться в условно чистой атмосфере, следовательно, конструкция должна быть выполнена в соответствии с требованиями по защите от дестабилизирующих влияний для нормальных климатических условий (температура от 15 до 30°С, давление от 630 до 800 мм рт. ст., относительная влажность от 45 до 80 % (при 25 °С), воздух без химических примесей и пыли).
Следует учитывать, что воздух с высокой (около 80 %) относительной влажностью, действующей длительное время на радиоаппаратуру, - фактор, который необходимо учитывать при ее конструировании и эксплуатации. Поэтому необходимо применение защитного покрытия от влаги.
При разработке конструкции активного сабвуфера следует учесть требования по стандартизации, унификации и миниатюризации. Выбор конструктивных решений должен обеспечивать удобство эксплуатации и ремонтопригодности. Эффективным средством достижения этих целей является правильное акустическое проектирование.
Для подведения напряжения питания и подключения шины «земля» рекомендуется использовать крайние контакты электрических соединителей. Тип соединения выборирается с учетом назначения, количества контактов, требований механической и климатической устойчивости, защиты от других внешних воздействий, электрических параметров и стоимости.
Информационные линии связи в пределах плат осуществляют с помощью печатного монтажа. Проводники, расположенные на различных сторонах платы, должна перекрещиваться под углом 45° или 90°. Проводники должны быть по возможности короткими.
Параметры и характеристики применяемой элементной базы и материалы печатной платы должны соответствовать климатическому исполнению изделия и выполнять свои функции в заданных условиях эксплуатации.
К корпусу активного сабвуфера предъявляются достаточно высокие требования. Он должен обеспечивать: жесткое закрепление платы и соединения ее выводов с переходами, предназначенными для связи с внешними цепями; защиту платы и ЭРЭ от механических, климатических и других воздействий.
Основываясь на сложившемся подходе к конструктивному исполнению изделий РЭС, с учетом унификации, нормализации и технологичности целесообразно выполнить активный сабвуфер в виде конструкции прямоугольной формы, обеспечивающей простоту и надежность использования. Корпус активного сабвуфера должен быть герметичным. Материал корпуса должен обеспечивать жесткость панелей, особенно той, на которой смонтирован динамик. Наиболее подходящие материалы - фанера, ДВП и ДСП. Толщина панелей под динамики должна быть не меньше 15 мм, прочих - 10 мм. Жесткость панелей можно увеличить при помощи дополнительных распорок между противоположенными стенками или ребер жесткости в виде прикрепленных к панели брусков.
Введение звукопоглотителя в конструкцию корпуса позволяет превратить адиабатический процесс сжатия - расширения воздуха в ящике в изотермический, что эквивалентно увеличению объема корпуса от 10 до 20 %. Звукопоглощающий материал для заполнения внутреннего объема корпуса должен быть рыхлым и пористым, применимы вата в виде матов, дакрон [2].
Требования к эргономике обычные и связаны только с удобством эксплуатации изделия.
Литература
1. Электронная энциклопедия. – Электрон. дан. – Режим доступа: ru.wikipedia.org/wiki/сабвуфер.
2. Обзор сабвуферов. - Электрон. дан. – Режим доступа: hhttp://www.stereo.ru.
Воронежский государственный технический университет
УДК 624.156
Э.Ф. Акперов, Л.С. Очнева, Н.Э. Самойленко
ГЕНЕРАТОР ВЫСОКОВОЛЬТНЫХ ИМПУЛЬСОВ
Рассматриваются вопросы конструкторско-технологического проектирования генератора высоковольтных импульсов, применяемого в качестве многоканального сигнального устройства совместно с набором датчиков для охраны территории по периметру
Генератор высоковольтных импульсов, принципиальная, электрическая схема которого приведена на рис. 1, представляет преобразователь низковольтного постоянного напряжения в импульсное высоковольтное напряжение. Данное устройство, совмещенное со схемой громкоговорителя и охранными датчиками, предлагается использовать для охраны пастбищ, садов и других объектов, где нежелательно несанкционированное пересечение границы охраняемого объекта. Границы объекта должны быть обнесены изгородью.
Генератор, включенный в общую цепь, вырабатывает импульсы длительностью от 0,01 до 0,015 с (от 60 до 70 импульсов в минуту), и создает напряжение относительно “земли” 7 кВ. Так как выходное сопротивление генератора велико, то при соприкосновении животного с изгородью, выходное напряжение генератора уменьшается с 7 кВ до 15 В, что безопасно для животного. В состав генератора импульсов входит охранная сигнализация. Она срабатывает при отсутствии импульсов высокого напряжения на изгороди из-за обрыва провода или падения стоек и провода на землю, попадание растительности на провод изгороди. Особенно эффективно может быть использована такая сигнализация для охраны скота в ночное время.
Генератор высоковольтных импульсов содержит два последовательно включенных преобразователя напряжения. Первый преобразователь - несимметричный мультивибратор на транзисторах VT1 и VT2. Нагрузкой транзистора VT2 служит первичная обмотка повышающего трансформатора Т1. С его вторичной обмотки последовательность коротких импульсов с амплитудой 150 В поступает ко второму преобразователю. Второй преобразователь собран по схеме тиристорного генератора импульсов. Выходные импульсы со вторичной обмотки Т1 после выпрямления диодами VD2 и VD3 заряжают накопительный конденсатор СЗ. Когда напряжение на СЗ достигает напряжения включения динистора VS2 открывается VS1, и конденсатор СЗ разряжается на первичную обмотку трансформатора Т2. Разрядный импульс тока через первичную обмотку вызывает появление на вторичной обмотке высоковольтного импульса.
После окончания разряда конденсатора С3 тиристор VS1 закрывается, и конденсатор заряжается снова. Частота повторения импульсов мультивибратора - десятки килогерц, а частота импульсов, подаваемых на провод изгороди, - от одного до нескольких герц.
|
Рис. 1. Схема генератора высоковольтных импульсов |
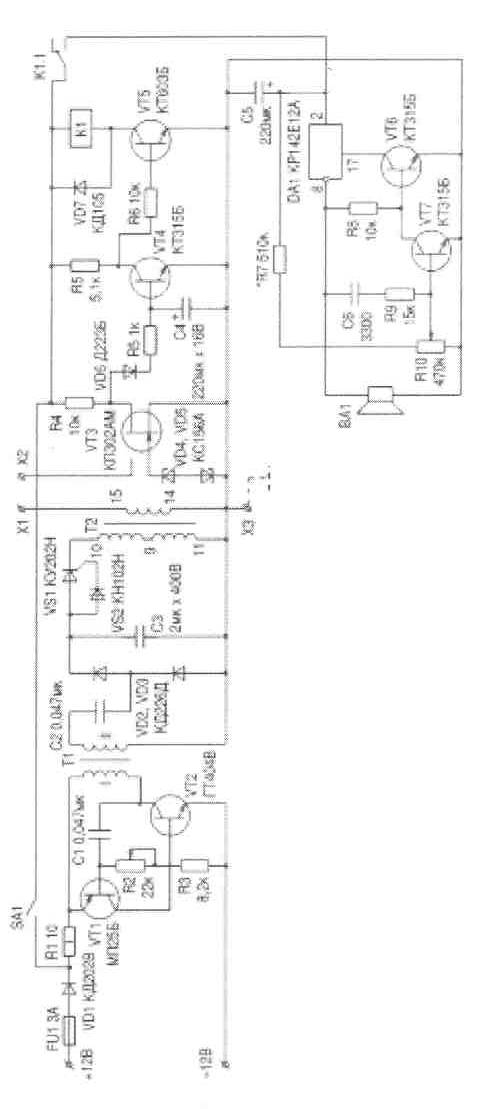
Трансформатор Т1 выполнен на броневом ферритовом сердечник диаметром 30 мм, первая обмотка содержит 35 витков ПЭВ-2 0,45 мм, втораяI обмотка 800 витков ПЭЛ 0,16 мм. Чашки магнитопровода с зазором 0,2 мм стянуты винтом и гайкой. В качестве трансформатора можно использовать промышленные дроссели, например, ДЗО-0,16 и ДЗ...Д16, имеющие две обмотки.
Трансформатор Т2 - строчный от телевизора ТВС110ГЦ15 или катушка зажигания от автомобилей. Реле К1 типа РЭС-9, громкоговоритель ВА1-5 типа ГДШ-10-8 или любой другой с сопротивлением звуковой катушки 8 Ом.
Правильно собранный генератор высоковольтных импульсов в наладке практически не нуждается.
Разрабатываемое устройство является стационарным, с питанием от аккумуляторов, либо от стационарного источника питания. Конструкция многоканального охранно-сигнального устройства должна предусматривать защиту её элементов от внешних воздействий. В схеме необходимо максимально применить унифицированные детали и типовые узлы. Это ускорит процесс разработки и повысит надёжность изделия. Данное изделие можно собрать и из достаточно распространенных элементов, которые легко заменяются аналогами, Это позволит наладить производство мелкими сериями на малых предприятиях.
Проектирование органов управления и контроля должно производиться с учётом психофизиологических факторов человека. Количество органов управления необходимо свести к необходимому минимуму. Органы управления и индикаторы должны иметь соответствующие обозначения и маркировку. Необходимо предусмотреть свободный доступ к регулируемым элементам и контрольным точкам на плате.
Конструкция генератора должна обеспечивать отсутствие наводок и взаимовлияния ряда элементов, соблюдение теплового режима, максимальное заполнение пространства. Размещение органов управления и контроля на лицевой панели должно обеспечивать простоту и удобство работы пользователя. Учитывая все выше перечисленные критерии данная конструкция выполнена в виде фрезерованного алюминиевого корпуса с размещёнными внутри клавиатурой и индикатором. На задней панели расположено технологическое отверстие для вывода кабеля.
Для обеспечения стабильности электрических параметров механическая прочность несущих конструкций должна быть достаточной для компенсирования механических воздействий при эксплуатации и транспортировке.
Воронежский государственный технический университет
ЗАКЛЮЧЕНИЕ
Статьи, включенные в настоящий сборник, рассматривают различные аспекты процесса обеспечения качества и надежности радиоэлектронных устройств, приборов, комплексов и систем, программно-технических систем и комплексов, освещают вопросы разработки соответствующих методик, моделей, алгоритмов, методов проектирования, анализа и оценки показателей качества и надежности, отражают результаты практических и теоретических исследований, проектных работ, проведенных в вузах и предприятиях г. Воронежа. Приведенные материалы отражают современный уровень и перспективные направления в области создания и производства высоконадежных радиоэлектронных средств и технических и программно-технических систем, имеют прикладную направленность и охватывают широкий круг вопросов, связанных с проектированием, испытаниями, изготовлением и эксплуатацией подобных объектов.
СОДЕРЖАНИЕ
Введение………………………………………………… |
3 |
|
4 |
|
7 |
|
9 |
|
13 |
|
17 |
|
21 |
|
24 |
|
28 |
|
32 |
|
36 |
|
40 |
|
44 |
|
48 |
|
52 |
|
56 |
|
60 |
|
65 |
|
69 |
|
73 |
|
77 |
|
81 |
|
85 |
|
89 |
|
93 |
|
98 |
|
103 |
|
108 |
|
112 |
|
116 |
|
120 |
|
126 |
|
130 |
|
133 |
|
138 |
|
141 |
|
147 |
|
151 |
|
157 |
|
163 |
|
170 |
|
175 |
|
181 |
|
186 |
|
191 |
|
198 |
|
201 |
|
213 |
|
220 |
|
223 |
|
227 |
|
230 |
|
238 |
|
244 |
|
250 |
|
254 |
|
|
Заключение………………………………………........… |
257 |