

Учебное пособие 800670
.pdfб) факторы, влияющие на сценарии преодоления зоны обнаружения и тактику службы охраны: наличие пассивного основного ограждения; однородность конструкции ограждения, виды и количество разрывов в нем (транспортные проезды, здания и сооружения); наличие полосы отчуждения вдоль ограждения.
в) помеховые факторы: движение ж/д и автомобильного транспорта вдоль ограждения; электромагнитные помехи (ЛЭП, радиостанции, локаторы); источники стационарных сейсмических и акустических помех; движение животных и птиц в зоне обнаружения.
г) климатические факторы: диапазон температуры окружающей среды; атмосферные выпадаемые (дождь, снег) и конденсируемые (иней, роса) осадки; грозовые разряды.
На сценарий проникновения нарушителя на объект влияет вид и состояние основного ограждения, однородность его конструкции, наличие полосы отчуждения. На некоторых объектах может отсутствовать основное ограждение, а линия периметра обозначаться лишь небольшим предупредительным ограждением. Широкий класс объектов – магистральные трубопроводы – в принципе не имеют ограждения, а их охраняемая зона обозначается только предупредительными табличками.
Основное ограждение может быть выполнено из кирпича или железобетонных плит, металлической сетки или арматурных прутьев, колючей проволоки или досок и пр. Очень редко ограждение объекта по всему периметру выполняется в едином конструктивном исполнении, кроме того, в разрыве ограждений могут находиться административные здания объекта, роль части ограждения могут выполнять стены сооружений, примыкающих к объекту и к нему не относящихся. В соответствии с противопожарными требованиями на любом объекте должно быть не менее двух автотранспортных проездов, один из которых является аварийным.
Наличие полосы отчуждения вдоль основного ограждения позволяет не только устанавливать на ней СО, но и создавать контрольно-следовую полосу и применять физические препятствия, обеспечивающие задержку нарушителя. Это помогает создать дополнительный резерв времени силам охраны для принятия ответных мер.
Реальные характеристики периметровых СО в значительной
121
степени определяются и совокупностью помеховых факторов. В частности, влияние движения транспорта вдоль ограждения передается на СО как в виде вибраций конструкций ограждения и грунта, так и через изменение электромагнитной обстановки. На ряд СО оказывают воздействие стационарные сейсмические и акустические помехи. Весьма важным, а в некоторых случаях определяющим помеховым фактором являются электромагнитные помехи, характер которых проблематично заранее описать и регламентировать, например, аварийное отключение напряжения в ЛЭП, пересекающей ограждение, влияние работающей вблизи периметра сварочной установки, переносной радиостанции и т.п.
Многообразие влияющих факторов, которые существуют на периметре объектов, предопределяет необходимость применения СО, работающих на различных физических принципах. Однако в этом случае различие характеристик используемых СО, особенности сопряжения продольных и поперечных сечений их зон обнаружения с топографией земной поверхности вдоль периметра объекта и с конструктивными элементами ограждений, а также присутствующие помеховые факторы приводят к неоднородности характеристик системы охраны вдоль периметра объекта.
Климатические факторы приводят к неоднородности характеристик периметровых СО во времени. Особенностью периметровых СО является то, что они круглогодично работают на открытом воздухе. Изменяющиеся метеоусловия в различной степени влияют на основные характеристики СО. На характеристики оптических СО оказывает влияние туман и снегопад, емкостные СО чувствительны к сильному дождю и снегопаду с мокрым снегом. При изменении высоты снежного покрова необходимо регулировать высоту установки антенн радиолучевых СО и т.п. С целью компенсации климатических факторов практически для всех типов СО проводятся сезонные регулировки для обеспечения их правильного функционирования, но в межсезонные периоды характеристики СО могут отличаться от указанных в ЭД.
Вследствие изменяющихся по длине рубежа охраны и во времени условий функционирования СО, важнейшая характеристика систем охраны – вероятность обнаружения – является неоднородной в пространстве и во времени. Службы безопасности при эксплуатации систем охраны оперируют со значением вероятности обнаружения, полученным при аттестации изделия его
122
разработчиком в каких-то определенных условиях. Реальное значение вероятности обнаружения конкретного рубежа охраны, как правило, не определяется, и у службы безопасности создается представление о равнопрочности системы охраны по всей протяженности рубежа охраны в любой момент времени.
Вероятность обнаружения также зависит от способа преодоления рубежа охраны нарушителем: перелазом через ограждение или его проломом, пересечения зоны обнаружения шагом или бегом, в рост или ползком. Она зависит от степени осведомленности нарушителя о характеристиках применяемых СО, использования им подручных средств. Поэтому при создании системы охранной сигнализации, адекватной возможным действиям нарушителя, должна быть разработана модель нарушителя. С целью повышения вероятности его обнаружения на особо важных объектах вводят второй и третий рубежи охраны, тем самым фактически снижают влияние неоднородности характеристик СО. Вероятность обнаружения нарушителя такой комбинированной системой определяют по различным решающим правилам: по схеме «И», «ИЛИ», «2 из 3-х» и т.п. При оценке эффективности системы безопасности исходят из тех значений технических характеристик изделий, в т.ч. и вероятности обнаружения, которые указаны в эксплуатационных документах на изделия, либо они сообщены потребителю каким-либо способом поставщиком изделий. Однако из-за неоднородности характеристик СО реальное значение вероятности обнаружения нарушителя комбинированной системой охраны будет отличаться от рассчитанного по формулам, описывающим вышеприведенные решающие правила.
Введение нескольких рубежей охраны неизбежно резко повышает стоимость системы сигнализации, а поставленная цель повышения ее эффективности обнаружения нарушителя может быть и не достигнута. Поясним это на примере.
Вдоль железобетонного ограждения в полосе отчуждения установлено радиолучевое СО. Для повышения вероятности обнаружения ввели второй рубеж охраны путем установки по верху ограждения емкостного СО, что иллюстрируется на рисунке.
123

Принцип организации нескольких рубежей охраны
По траектории А объемная зона обнаружения радиолучевого СО непосредственно сопрягается с ограждением. При преодолении рубежей по траектории А после перелаза через ограждение нарушитель попадает в полный рост в зону радиолучевого СО, при этом нет таких снижающих эффективность средства факторов, как наличие травы и неровности подстилающей поверхности. При движении по траектории Б в месте стыка двух участков радиолучевых СО (участок «с-д») осведомленный нарушитель может перегруппироваться и преодолеть ползком зону обнаружения радиолучевого СО, вероятность обнаружения которого «ползком» ниже, чем «в рост» или «согнувшись». Затраты на создание такой двух рубежной системы охраны велики, а существенного повышения вероятности обнаружения не достигнуто, пространственная неоднородность системы охраны не устранена.
Повысить пространственную однородность системы охраны можно не введением второго рубежа, а установкой на участке «с-д» физического препятствия в виде спирали из ленты АСКЛ и таким образом значительно снизить вероятность преодоления рубежа охраны ползком. Стоимость такой системы охраны будет меньше, чем двухрубежной, а эффективность охраны не снизится.
Можно сделать вывод, что, система охранной сигнализации будет эффективной, как с точки зрения вероятности обнаружения нарушителя, так и с точки зрения стоимости, если она будет обладать однородными пространственно-временными характеристиками. Для достижения этого проектировщик системы охранной безопасности должен владеть методами, позволяющими провести необходимые оценки однородности системы сигнализации и на основе этих оценок предпринять соответствующие меры по устранению возможных неоднородностей. А владение этими методами заказчика системы
124
позволило бы ему в значительной степени знать реальные характеристики системы сигнализации и с учетом этих знаний организовывать эффективную тактику действий сил охраны. Однако в настоящее время методы оценки эффективности систем охранной безопасности, с учетом их реальных характеристик на конкретных объектах эксплуатации, не отработаны и требуют совершенствования.
Сама задача создания системы безопасности с однородными пространственно-временными характеристиками является комплексной задачей, при решении которой нужно учитывать, что: обобщенные тактико-технические характеристики рубежа охраны с несколькими СО не определяются простым «суммированием» характеристик отдельных средств обнаружения, образующих комбинированное средство обнаружения, а имеют сложную зависимость, методы нахождения которой не отработаны;
-рациональность проектных решений при создании периметровых средств обнаружения может быть достигнута только при реализации модели нарушителя, устанавливающей его степень осведомленности о характеристиках средств обнаружения;
-эффективность системы безопасности может быть повышена не только путем наращивания количества рубежей охраны
иприменения по всему периметру объекта физических препятствий, но и умелым применением физических препятствий только на наиболее уязвимых участках.
Для всестороннего и полного решения задачи обеспечения однородности системы охраны периметра необходима доработка существующих методов оценки их характеристик и развитие принципов, лежащих в основе проектирования систем безопасности. Актуальной является аттестация периметровых систем безопасности, методика которой должна разрабатываться на основе методик аттестации отдельных средств обнаружения и их комбинаций.
Литература
1. Гарсиа, М. Проектирование и оценка систем физической защиты [Текст] / М. Гарсиа; пер. с англ. В.И. Воропаева, Е.Е. Зудина и др. — М.: Мир, АСТ, 2002. — 386 с.
125
2.Рекомендации по антитеррористической защищенности объектов промышленности и энергетики Российской Федерации [Текст] : утв. приказом Минпромэнерго России 05.12.06.
№365).
3.Радаев, Н.Н. Террористическая угроза: количественная оценка для конкретного объекта [Текст] / Н.Н. Радаев // Вопросы анализа риска. – 2007. - № 3.
Воронежский государственный технический университет
126
УДК 519.711.3
Л.А. Носова, А.С. Самодуров
3D МОДЕЛЬ КВАДРОКОПТЕРА
В статье описывается устройство и принцип работы квадрокоптера, его основные принципы стабилизации полёта. В качестве примера приводятся технические характеристики трех квадрокоптеров для сравнения параметров. Также представлен эскиз 3D модели беспилотного летательного аппарата
Квадрокоптер - беспилотный летательный аппарат (БЛА). Он представляет собой платформу с четырьмя роторами, одна пара которых вращается по часовой стрелке, другая - против часовой стрелки (рис. 1). Квадрокоптеры обладают рядом преимуществ, таких как: надежность и простота конструкции, большая стабильность, компактность и маневренность, малая взлетная масса при существенной массе полезной нагрузки.
Область применения квадрокоптеров достаточно широка. Он может быть использован как недорогое и эффективное средство для получения фото- и видеоизображений с воздуха, в том числе в плохих погодных условиях. Благодаря тому, что квадрокоптер дистанционно управляемый летательный аппарат, он хорошо подходит для наблюдения и контроля объектов и зон, доступ к которым затруднен (например, в случае естественных или техногенных катастроф) или в условиях, непригодных для человека, таких как повышенный уровень радиации или сильное загрязнение воздуха.
Основной задачей управления таким БЛА является его стабилизации в условиях воздействия внешних возмущающих факторов, таких как сильный порывистый ветер.
Квадрокоптер представляет собой платформу с четырьмя роторами. Центральная часть квадрокоптера служит для размещения контроллера, батареи и полезной нагрузки (например, видеокамеры). Радиально от центра на балках устанавливаются микроэлектродвигатели с несущими винтами, образуя крестообразную конструкцию аппарата.
Во время полета квадрокоптер поддерживает горизонтальное положение относительно земли, может парить на месте, вращаться относительно вертикальной оси, перемещаться в любом направлении. Для компенсации вращающего момента, вызванного вращением роторов, у квадрокоптера 1-й и 3-й роторы вращаются по
127

часовой стрелке, а 2-ой и 4-ый - против часовой стрелки.
Рис. 1. Внешний вид квадрокоптера
Для того чтобы квадрокоптер начал движение, необходимо вывести его из состояния баланса путем увеличения силы тяги (скорости вращения) части пропеллеров, в результате квадрокоптер наклоняется и начинает движение в нужном направлении. Для поворота квадрокоптера вокруг своей оси необходимо ускорить вращение одной пары пропеллеров вращающихся в одном направлении и замедлить вращение другой пары пропеллеров.
Например, чтобы повернуть аппарат вокруг своей оси против часовой, 1-й и 3-й роторы должны вращаться быстрее, а 2-й и 4-й роторы должны замедлиться (рис. 2). Основные режимы полета и стабилизация квадрокоптера обеспечивается с помощью контроллера размещенного на нем. Контроллер на основании данных полученных от датчиков при помощи специальной программы рассчитывает скорости вращения роторов и подает на двигатели соответствующие управляющие сигналы. Минимальным набором датчиков необходимых для стабилизации квадрокоптера являются акселерометры - для измерения ускорения и гироскопы - для определения углов наклона. Кроме того, квадрокоптер может быть оборудован барометром, магнитомером (компасом) и даже GPSнавигатором.
128
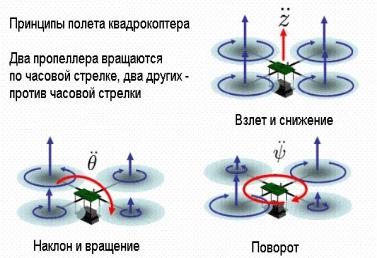
Рис. 2. Принцип работы квадрокоптера
Необходимость стабилизации полёта квадрокоптера вытекает из принципа его работы. Квадрокоптер же таким свойством не обладает и при малейшем внешнем воздействии начинается «неуправляемое снижение».
Для того чтобы эффективно стабилизировать квадрокоптер в полете, необходимо:
-иметь возможность определять, в каком состоянии находится система в данный момент;
-иметь возможность оказывать управляющие воздействия на
систему;
-знать, в каком состоянии будет поддерживаться система. Для определения состояния системы используют различные
датчики (гироскоп, акселерометр, магнитометр, высотомер и т.д.), обеспечивающие обратную связь. Управляющее воздействие оказывают посредством изменения скорости вращения двигателей. Например, если БЛА наклонился на левый бок, то соответственно необходимо увеличить обороты левого двигателя и уменьшить обороты правого.
В первую очередь для стабилизации квадрокоптера необходимо знать его абсолютное положение в пространстве. Стабилизация осуществляется по ряду параметрам: высоте, углам,
129
линейным перемещениям. Так как квадрокоптер является летательным аппаратом, для углов наклона используются авиационные термины: тангаж (в плоскости оси Х), крен (в плоскости оси У) и рыскание (в плоскости оси Z).
Для определения крена, тангажа и рыскания пользуются гироскопом, являющимся датчиком моментальных угловых скоростей вокруг оси.
В таблице приведено несколько примеров квадрокоптеров для сравнения технических характеристик.
Технические характеристики квадрокоптеров
Наименование |
Значения для квадрокоптера, типа |
||||||
показателя |
Hubsan |
|
Blade 350 |
DJI Phantom |
|||
|
|
H107 X4 |
|
QX |
FC40 |
||
Длина, мм |
60 |
|
465 |
350 |
|||
Ширина, мм |
60 |
|
465 |
350 |
|||
Высота, мм |
50 |
|
138 |
190 |
|||
Размер по |
|
|
350 |
350 |
|||
диагонали от |
|
|
|
|
|
|
|
ротора к ротору, |
|
|
|
|
|
|
|
мм |
|
|
|
|
|
|
|
Диаметр несущих |
40 |
|
210 |
|
|
||
винтов, мм |
|
|
|
|
|
|
|
Вес, гр |
680 |
|
680 |
600 |
|||
Время зарядки, мин |
30 |
|
40 |
40 |
|||
Время полета, мин |
7-11 |
|
7-14 |
10-15 |
|||
Грузоподъемность, |
300 |
|
300-500 |
1200 |
|||
гр |
|
|
|
|
|
|
|
Наименование |
|
Значения для квадрокоптера, типа |
|||||
показателя |
|
Hubsan H107 |
|
Blade 350 |
|
Hubsan H107 |
|
|
|
X4 |
|
QX |
|
X4 |
|
Радиус действия, м |
|
100-150 |
|
|
200-250 |
|
300-500 |
Пульт управления |
|
четырехкана |
|
пятиканаль |
|
семиканальн |
|
|
|
льный |
|
ный |
|
ый |
|
Аккумулятор |
|
3.7V |
|
11,1V 3S |
|
2200 mAh 3S |
|
|
|
380mAh |
|
2200mAh |
|
LiPo |
|
|
|
LiPo |
|
LiPo |
|
|
|
Кабель USB |
|
есть |
|
есть |
|
есть |
|
Зарядное |
|
есть |
|
есть |
|
есть |
|
устройство |
|
|
|
|
|
|
|
Камера |
|
0,3 Мп |
|
GoPro |
|
FC40 |
|
|
|
|
|
|
|
|
HD720p |
130