

Учебное пособие 800600
.pdfПродолжительность третьей коммутации должна быть равна времени практического завершения переходного процесса и установления принужденного режима.
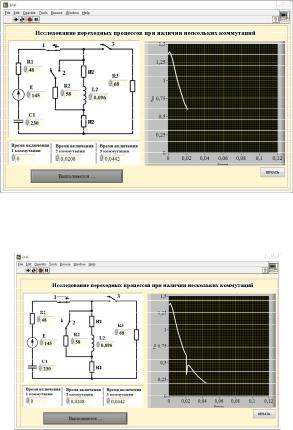
Рис. 1. Фронтальная панель виртуальной установки для проведения эксперимента
Фронтальная панель виртуальной установки содержит следующие элементы:
–электрическая схема с полями для задания параметров;
–поля установки времени первой, второй и третьей коммутации;
–графическая панель для отображения кривой зависимости тока от времени;
–функциональная кнопка «Выполнить», предназначенная для запуска эксперимента;
–функциональная кнопка «Печать», предназначенная для вывода графика на печать.
Данный эксперимент представляет собой исследование переходных процессов при наличии трех коммутаций.
Для проведения эксперимента устанавливаются значения параметров цепи, а также время для каждой коммутации.
С помощью кнопки «Выполнить» запускается выполнение эксперимента.
61
В соответствии с заданным временем для каждой коммутаций, последовательно в автоматическом режиме срабатывают ключи (1, 2, 3) электрической цепи.
На рисунках 2 – 4 показана фронтальная панель виртуальной установки при первой, второй и третьей коммутации соответственно.
Рис. 2. Фронтальная панель виртуальной установки при первой коммутации
Рис. 3. Фронтальная панель виртуальной установки при второй коммутации
62

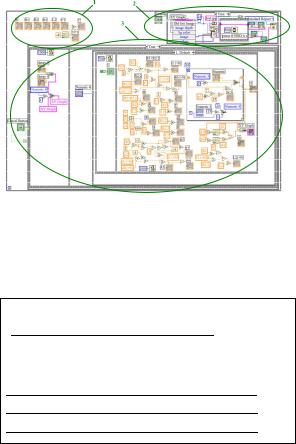
Рис. 4. Фронтальная панель виртуальной установки при третьей коммутации
После третьей коммутации эксперимент завершается, ключи электрической цепи размыкаются, кнопка «Выполнить» становится активной для выполнения нового эксперимента с возможностью изменения параметров цепи.
На графической панели отображается кривая зависимости тока от времени после трех коммутаций для анализа с возможностью вывода на печать. Графическая панель очищается каждый раз перед началом эксперимента до выполнения первой коммутации.
На рис. 5 показана блок-диаграмма виртуальной установки, которая состоит из следующих объектов:
1 – контроллеры параметров электрической цепи;
2 – набор функций для вывода на печать; 3 – набор индикаторов, структур, арифметических функций и
локальных переменных для выполнения расчетов, необходимых для построения кривой зависимости тока от времени.
При выполнении расчетов используются локальные переменные контроллеров параметров электрической цепи, что дает возможность не тянуть связующие нити от элемента через всю программу, а просто вызвать его локальный параметр в определенном месте программы [3].
Блок-диаграмма включает в себя следующие структуры: структура Case, содержащая в себе один или более вариантов диаграмм, из которых выполняется только один вариант (например, замыкание первого, второго или третьего ключа); структура Sequence
63
Structure обеспечивает последовательное выполнение частей программы (например, сначала очищается графическая панель, потом начинается эксперимент в соответствии с заданными условиями).
Рис. 5. Блок-диаграмма виртуальной установки
Для рассматриваемой электрической цепи (рис. 1) выполнен аналитический расчет переходного тока [1] с применением MathCad.
Результаты расчета представлены на рис. 6 и 7.
Построение графика переходного тока
Уравнение тока при первой коммутации
 i11(t1) 1.631 e 48.179t1 0.263 e 514.359t1
i11(t1) 1.631 e 48.179t1 0.263 e 514.359t1
Уравнение тока при второй коммутации
 i12(t2) 0.54 e 42.7(t2 0.0208) 0.215 e 1061.3(t2 0.0208)
i12(t2) 0.54 e 42.7(t2 0.0208) 0.215 e 1061.3(t2 0.0208)
Уравнение тока при третьей коммутации
 i13(t3) 0.26 e 55.98(t3 0.0442) 0.032 e 878.8(t3 0.0442)
i13(t3) 0.26 e 55.98(t3 0.0442) 0.032 e 878.8(t3 0.0442)
Рис. 6. Фрагмент документа Mathcad (аналитические выражения для переходного тока)
64
|
1.5 |
|
|
|
|
1.4 |
|
|
|
|
1.3 |
|
|
|
|
1.2 |
|
|
|
|
1.1 |
|
|
|
|
1 |
|
|
|
i11(t1) |
0.9 |
|
|
|
i12(t2) |
0.8 |
|
|
|
i13(t3) |
0.7 |
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
0.4 |
|
|
|
|
0.3 |
|
|
|
|
0.2 |
|
|
|
|
0.1 |
|
|
|
|
0 0 |
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 |
0.1 |
0.11 0.12 |
|
|
t1 t2 t3 |
|
|
Рис. 7. Фрагмент документа Mathcad (график переходного процесса)
Сравнение результатов моделирования (рис. 4) и расчетов (рис. 7) показало их совпадение. При этом моделирование ускоряет процесс анализа и делает его более наглядным.
Разработанная виртуальная установка используется при проведении лабораторной работы «Исследование переходных процессов при наличии нескольких коммутаций» по дисциплине «Теоретические основы электротехники» на кафедре «Электрификация и электроснабжение» МГУПС (Воронежский филиал МИИТ).
Литература
1.Демирчан К.С. Теоретические основы электротехники [Текст]: учебник для вузов / К.С. Демирчян, Л.Р. Нейман, Н.В. Коровкин, В.Л. Чечурин. – Том 2. – 4-е изд., перераб и доп.– СПб.: Питер, 2003 – 576 с.
2.Суранов А.Я. LabVIEW 8.20: Справочник по функциям [Текст] / А.Я. Суранов. – М.: ДМК Пресс, 2007. – 536 с.
3.LabVIEW: стиль программирования [Текст] / Пер. с англ. под ред. Михеева П.С. – М.: ДМК Пресс, 2008. – 400 с.
Московский государственный университет путей сообщения
(Воронежский филиал МИИТ)
65
УДК 621.313
Д.С. Баранов, Л.Н. Титова, С.А. Горемыкин
ОСОБЕННОСТИ НАМОТКИ КАТУШКИ СВЕРХТОНКИМ ПРОВОДОМ
Выполнение катушки из сверхтонкого обмоточного провода требует соблюдения специальных технологических режимов. Выполненные исследования позволили определить приемы намотки, обеспечивающие требуемые параметры катушки
Ключевые слова: катушка, диаметр провода, намотка катушки
Развитие космической и ракетной техники, авиации и скоростного судоходства поставило на повестку дня задачу снижения габаритов, массы, потребляемой мощности, повышения точности и снижения времени готовности навигационных приборов, важное место занимают гироскопические устройства.
Внастоящее время получили применение роторные вибрационные гироскопы (РВГ). Опубликованные исследования и разработанные конструкции [1, 2] в определенной степени решающие задачу.
Вто же время промышленное производство указанных изделий требует специальной технологической подготовки. В частности, эта задача связана с необходимостью изготовления катушки чувствительного элемента РВГ из сверхтонкого эмальпровода с диаметром медной жилы 0,025 мм и менее. Специальные требования к качеству получаемого сигнала (требование полной идентичности кривой ЭДС, индуктируемой в различных катушках одного изделия) дополнительно усложняют проблему, ужесточая допустимые отклонения в качестве раскладки витков, их геометрической конфигурации, идентичности электромагнитные параметров катушки.
Малое сечение провода обуславливает требования к режиму намотки катушки. Естественно предполагать, что стремление минимизации размеров, хорошей плотности укладки требует соответствующего натяжения провода при намотке [3]. Но это усилие может вызвать удлинение провода и уменьшение его сечения, увеличение удельного сопротивления меди, утоньшение и повреждение слоя эмальизоляции взаимное смещение витков провода
вкатушке, обрыва провода е и др.
66
В качестве контролируемого параметра катушки можно принять её сопротивление. Его зависимость от указанных и других входных факторов можно представить выражением R f (q1;q2;q3...qn ), где q1, q2 …qn – входные факторы. Последние в реальных условиях
изменяются в некоторых пределах (Δq1, |
q2 … qn), |
вызывая |
соответствующее изменение сопротивления ΔR. |
|
|
Реально имеется возможность оценить |
влияние |
некоторых |
входных факторов: погрешности провода в состоянии поставки, погрешности намотки катушки (натяжение, удельное сопротивление, точность отсчета витков и др.)
R |
4l |
|
4 |
l |
8 l |
d , |
|
dМ2 |
dМ2 |
dМ3 |
|||||
|
|
|
|
где:Δρ допустимый разброс величины удельного сопротивления, l допустимый разброс длины провода, м; d допустимый разброс величины диаметра провода, мм; ( d 0,002 мм);
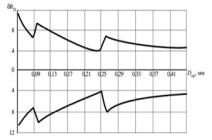
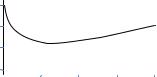
Рис.1. Изменение сопротивления провода от величины допустимых отклонений его диаметра
67
ρ,мкОм·м
0,0176
0,0172
0,0168
0,0164 |
t оС |
200 400 600 800
Рис. 2. Зависимость удельного сопротивления провода от температуры отжига
Использование приведенного выражения позволяет выявить наиболее благоприятное соотношение некоторых технологических погрешностей для минимизации разброса активного сопротивления катушки. При этом целесообразно разделить погрешности изготовления провода и изменение характеристик провода при намотке самой катушки.
К погрешностям изготовления провода можно отнести данные стандартов, технических условий или сопроводительных документов. На рис.1 показан колебание сопротивления провода от величины допустимых отклонений его диаметра [4]. Хорошо видно, что пределы колебаний параметра заметно возрастают с уменьшением диаметра провода.
После пропускания провода через волоки для снятия возникшего наклепа практикуется отжиг металла. При колебании температуры отжига изменяется удельное сопротивление меди. Эти колебания можно оценить по рис. 2 [3].
Практика показывает, сопротивление провода, его другие параметры (свойства изоляции и др.) в состоянии поставки колеблются как от одной тарной катушки к другой, так и в пределах одной тарной катушки. Из всего изложенного следует, что при производстве обмоток высокопрецизионных приборов целесообразно вводить операцию входного контроля обмоточного провода. Это будет способствовать идентичности параметров катушек в одном комплекте изделия.
Изменение характеристик провода при намотке штатных катушек связано в основном с режимами намотки. К ним следует отнести,
68
прежде всего, усилие натяжения провода и характер раскладки витков в тепе катушки.
Натяжение провода в общем случае имеет статическую и динамическую составляющие. Статическая составляющая определяется условиями съема провода с тарной катушки и наладкой устройств натяжения провода. Поэтому наладку используемого станка СНП-0,1-150В «Пульсар» пришлось скорректировать.
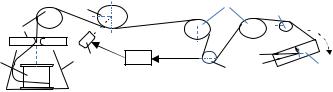
Схема намотки катушки представлена на рис. 3. Здесь предусмотрена осевая смотка провода с тарной катушки 1. Подобраны форма и размеры баллоноограничителя 2, обеспечивающего защиту вращающейся петли провода. Направляющие ролики 3 и 3' определяют траекторию движения
|
4 |
3' |
5 |
|
|
||
|
3 |
|
n |
|
|
r1 |
|
1 |
2 4 Д |
r2 |
|
П |
6 |
||
|
|
7 r2 |
|
|
|
Рис. 3. Кинематическая схема |
|
|
|
намотки катушки |
|
провода. Натяжение провода обеспечивается роликом 4, установленном на валу асинхронного двигателя Д. Датчик натяжения провода 7 через преобразователь П обеспечивает регулировку постоянного тока в обмотке двигателя Д для стабилизации натяжения провода. Через устройство укладки 5 провод попадает на шаблон 6, вращающийся с частотой «n». Форма шаблона прямоугольная. Буквами r1, r2 и r3 показаны расстояния ребра и граней шаблона от оси вращения.
Легко видеть, что при вращении шаблона будет изменяться скорость движения провода вдоль заданного тракта. Это приводит к возникновению дополнительных усилий натяжения, которые приводят к растяжению или даже к обрыву провода. Усилие натяжения провода устройством 4 и динамические параметры регулятора натяжения 7-П-Д (см. рис.3) подобраны таким образом, чтобы обеспечивалась плотная рядовая укладка провода на шаблоне при недопущении обрыва провода.
Наименьшего разброса параметров катушек удалось добиться при частоте вращения шаблона n = 90 об/мин, натяжении провода в пределах 7,0 г и тщательном соблюдении рядовой укладки витков,
69
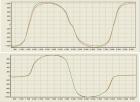
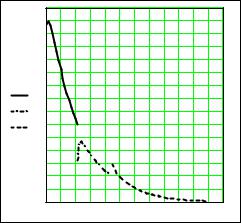
Рис. 4. Сравнение кривых ЭДС в двух катушках
геометрии катушки и точности ее укладки в изделии. На рис.4 показаны экспериментальные кривые ЭДС в двух катушках одного изделия. На верхнем виде показано неприемлемое различие двух кривых, что исключает нормальную работу прибора. Ниже показано приемлемое совпадение кривых ЭДС в двух катушках, обеспеченное выполнением приведенных выше условий.
Литература 1. Скороходов Е.А. Механизация и автоматизация производства
обмоток электроэлементов [Текст] / Е.А. Скороходов. – М.: Энергия, 1978. 191 с.
2. Ларин В.П. Технология намотки в приборо - и электроаппаратостроении [Текст]: учеб.пособие / В.П. Ларин. – СПб.:
СПбГУАП.,2003. 56 с.
Воронежский государственный технический университет
70