

Учебное пособие 800600
.pdfУДК 621.313
Е.Е. Карабут, С.А. Белозоров, Т.Е. Черных
ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ ОДНОСЛОЙНЫХ ОБМОТОК В СИНХРОННОМ ДИСКОВОМ ГЕНЕРАТОРЕ
Рассматриваются особенности использования однослойной двухплоскостной трехфазной обмотки в синхронном дисковом генераторе
Ключевые слова: синхронный дисковый генератор, обмотка, форма витка
Внастоящее время большой интерес представляют специализированные генераторы, используемые в микро ветро- и гидроэлектростанциях. Фактически эти электростанции представляют собой установки, преобразующие энергию движения воды или ветра в электричество. Спрос на такие установки повышается в связи с общим увеличением стоимости электроэнергии. Кроме этого, такие установки могут быть легко перемещены на новое место базирования (вплоть до подвижных электростанций), являются экологически чистыми и не требуют постоянного контроля.
Втаких энергоустановках как правило используются синхронные машины, к валам которых подключаются ветроили гидроколёса. При этом установки с вертикальной осью вращения, наиболее универсальны, более просты в изготовлении и эксплуатации. Синхронные дисковые генераторы [1], при использовании их в таких установках дают лучшие эксплуатационные характеристики. При том, что методики проектирования таких генераторов в настоящее время только разрабатываются [2].
Одной из основных частей любой электрической машины является ее обмотка. Так для классических машин барабанного типа разработано множество методик по их расчету и рекомендаций по выбору обмоток в зависимости от многих параметров разрабатываемых машин. В случае торцевых машин – такого нет. Сам по себе подход, по выбору схемы обмотки для торцевых машин такой же, как и для машин барабанного типа, но форма катушек и их групп, формулы для расчета активных и индуктивных сопротивлений (для методик проектирования) при этом будут сильно отличаться. В некоторых случаях, в зависимости от геометрических размеров магнитной системы некоторые виды обмоток, а в частности, формы катушек и их групп, невозможно изготовить.
91
Рассмотрим однослойную двухплоскостную катушечную схему обмотки и ограничения, накладываемые на неё, при её использовании в синхронных дисковых генераторах.
Развернутая схема такой обмотки для торцевой машины полностью соответствует аналогичной барабанной машины. При этом отличия наблюдаются в форме катушечных групп и их лобовых частей. Формы катушек могут быть самыми разнообразными: треугольной, трапециевидной, круглой, ромбической и другие.
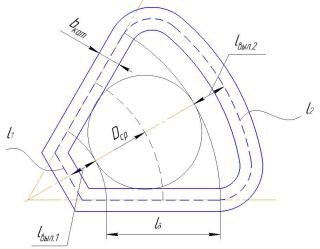
Рассмотрим трапециевидную форму катушки (рис.1).
Рис.1. Вид сверху катушки трапециевидной формы
Катушка имеет две лобовые части разного размера. С внутреннего радиуса генератора, располагается малое основание трапеции, которое накладывает ограничение на использование катушек такой формы: внутренний диаметр диска магнитопровода должен быть больше чем две ширины катушки. Со стороны большего основания трапеции такого ограничения нет.
В этом случае размер вылета внутренней лобовой части (lвыл.1) может изменяться в следующих пределах:
|
Dср |
l |
bкат |
|
|
|
bкат lвыл.1 |
|
|
|
|
; |
(1) |
|
2 |
|
|
|||
|
|
|
|
|
|
|
92
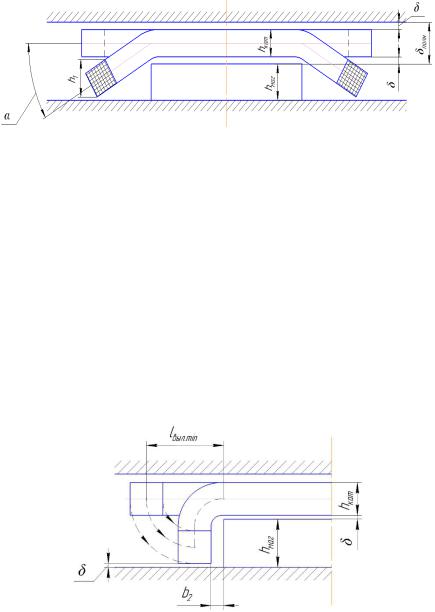
Рассмотрим ограничения накладываемые на использование катушки данной формы при рассмотрении перпендикулярной проекции катушки (рис. 2).
Рис.2. Схема отгиба лобовых частей
вдвухплоскостных обмотках
Вэтом случае, ограничение связано с наличием места, для расположения отгиба лобовой части катушки (для формирования двух плоскостей лобовых частей). Это необходимо для возможности размещения лобовых частей обмотки внутри генератора. Определим минимальную длину вылета лобовой части (рис. 3).
Минимальный размер вылета лобовой будет в случае, если угол отгиба составит 90 градусов. В этом случае:
l |
|
|
|
h |
кат |
b |
|
|
|
b |
кат |
|
|
|
выл.min |
|
|
|
|
2 |
|
|
|
; |
(2) |
||||
|
|
2 |
|
2 |
||||||||||
|
2 |
|
|
|
|
|
|
|
||||||
При этом b2 → δ. Формула (2) не учитывает изменение длины лобовой катушки (стержня), за счет нелинейных эффектов растяжения/сжатия материала.
93
Рис.3. Минимальная длина вылета лобовой части при максимальном изгибе
Следует отметить, что размер h1 должен удовлетворять условию:
h1 h3 ; |
(3) |
При этом размер h3 определяет доступную под катушку высоту площади S1.
h3 hмаг из ;
В случае, если условия (1-3) не выполняются, необходимо пересмотреть начальные параметры геометрии: высоту магнита (hмаг), геометрические размеры сечения катушки (bкат, hкат).
Литература 1. Пат. 111365 Российская Федерация, МПК Н02Л21/24.
Электрогенератор [Текст] / Писаревский Ю.В., Беляков П.Ю., Писаревский А.Ю., Тикунов А.В., Черных Т.Е. № 2011133630/07; заявл. 10.08.2011; опубл. 10.12.2011.
2. Черных Т.Е. Моделирование синхронного генератора прямого привода для вертикально-осевой ветроэнергетической установки [Текст] / Т.Е. Черных, С.А. Белозоров, А.В. Тикунов // Электротехнические комплексы и системы управления. – 2015 г. –№4.
– С.34 37.
Воронежский государственный технический университет
94
УДК 621.315: 004.94
М.Н. Полянская, А.В. Вотановская, Н.И. Климентов
МОДЕЛИРОВАНИЕ ОДНОРОДНОЙ ДЛИННОЙ ЛИНИИ В СРЕДЕ MULTISIM
Рассматривается процесс построения модели однородной длинной линии, представленной цепной схемой, в среде Multisim
Ключевые слова: длинная линия, моделирование, распределение напряжения
Представленные материалы посвящены разработке модели однородной длинной линии в среде Multisim. С целью анализа изменения тока и напряжения вдоль длинной линии, принимается, что каждый сколь угодно малый элемент линии по длине обладает сопротивлением и индуктивностью, а между проводами – проводимостью и емкостью, т. е. необходимо рассматривать линию как цепь с распределенными параметрами. Во многих случаях указанные параметры можно полагать распределенными равномерно вдоль линии. Такие линии называются однородными длинными линиями [1].
Вследствие того, что длинная линия обладает распределенными продольными и поперечными параметрами, ее можно рассматривать как каскадное соединение бесконечно большого числа элементарных звеньев, обладающих конечными значениями продольных и поперечных параметров. В цепях с распределенными параметрами рассматривают параметры, приходящиеся на единицу длины линии: R0
– активное сопротивление прямого и обратного проводов [Ом/км]; L0 – индуктивность петли, образуемой прямым и обратным проводами [Гн/км]; G0 – активная проводимость между проводами [См/км]; C0 – емкость между проводами [Ф/км] [1].
Передача электромагнитной энергии сопровождается потерями энергии в линии, а также изменением тока и напряжения вдоль линии, как по величине, так и по фазе.
Для экспериментального изучения в лабораторных условиях процессов в длинных линиях, обычно линии заменяют эквивалентными им цепными схемами [1]. Точность моделирования будет тем больше, чем большее число звеньев будет содержать цепная схема. Моделировать линию цепной схемой с достаточным числом
95
звеньев необходимо при изучении распределения напряжения и тока вдоль линии. Выбор числа звеньев в модели линии зависит от тех задач, которые будут поставлены при исследовании.
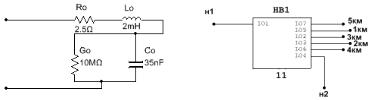
Процесс построения модели в среде Multisim рассмотрим на примере однородной длинной линии со следующими параметрами: напряжение на входе линии – U1=90 В; частота – f=1400 Г/ц; длина линии – l=45 км; продольные и поперечные первичные параметры на единицу длины – R0=2,5 Ом/км; L0=2 мГн/км; G0=0.1 мкСм/км; С0=35
нФ/км; нагрузка в конце линии – R2=140 Ом; L2=0,0136 Гн.
Вначале выбираем компоненты для одного звена и составляем схему замещения одного километра длинной линии (рис.1,а).
Затем выполняем каскадное соединение, состоящее из пяти таких звеньев, и формируем блок. Для этого выделяем все пять звеньев, не захватывая, при этом, отводы, выведенные после каждого звена, т. е. после каждого километра линии, и правой кнопкой мыши вызываем команду «Заменить иерархическим блоком» [2] (рис.1,б).
а) |
б) |
Рис. 1. Схема замещения звена однородной длинной линии (а) и блок, соответствующий каскадному соединению пяти звеньев (б)
Далее создаем схему модели для длинной линии l=45 км, состоящей из девяти, указанных выше, блоков. Первый блок представлен в развёрнутом виде из пяти звеньев, а остальные – в виде иерархических блоков (рис. 2).
На вход полученной модели длинной линии подключаем источник и устанавливаем требуемые значения напряжения U1 и частоты f, а в конце линии подключаем нагрузку R2 и L2. Измерение напряжений, токов и активных мощностей производится с помощью вольтметров, амперметров и ваттметров, включенных в начале и конце исследуемой однородной длинной линии [2]. Показания
96

всех указанных приборов совпали с расчетными данными.
Рис. 2. Модель однородной длинной линии
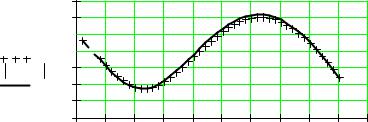
Для исследования распределения действующего значения напряжения вдоль заданной линии используется вольтметр V3, поочередно подключаемый к отводам после каждого звена (одного километра) линии (рис.2). По результатам этих измерений на рис.3 построен график (кривая Uи). Для сравнения на этом же рисунке изображена кривая Uр, полученная аналитически в результате расчетов [1].
97
110
100
90 Uиn 80
Uиn 80


Uр(lk) 70 60 50
40 0 5 10 15 20 25 30 35 40 45 50
ln lk
Рис. 3. Кривые распределения действующего значения напряжения вдоль длинной линии
Из рис. 3 видно, что экспериментальная (Uи) и расчетная (Uр) кривые, практически, совпадают.
На основании изложенного можно сделать вывод, что разработанная модель однородной длинной линии позволяет проводить исследования при различных значениях параметров на входе линии, а также при различных параметрах нагрузки в конце линии с хорошей сходимостью экспериментальных и расчетных данных.
Литература
1.Демирчан К.С. Теоретические основы электротехники [Текст]: учебник для вузов / К.С. Демирчян, Л.Р. Нейман, Н.В. Коровкин, В.Л. Чечурин. – Том 2. – 4-е изд., перераб. и доп. – СПб.: Питер, 2003. – 576 с.
2.Хернигер Марк Е. Электронное моделирование в Multisim [Текст] / Пер. с англ. Осипов А.И. – М.: ДМК Пресс, 2010. – 488 с.
Московский государственный университет путей сообщения (Воронежский филиал МИИТ)
98
УДК 621.313
М.К. Высоцкий, А.Ю. Писаревский
ОПТИМИЗАЦИЯ МАГНИТНЫХ СИСТЕМ БЕСКОНТАКТНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Осуществлен выбор критериев оптимальности и осуществлён выбор оптимальных геометрических соотношений машин с полым и гладким якорем
Ключевые слова: бесконтактный электродвигатель, критерии оптимизации, гладкий и полый якорь, моделирование магнитного поля
При проектировании магнитных систем электрических машин, как правило, возникает необходимость определения оптимальных геометрических размеров электродвигателя. Поэтому в каждом конкретном случае необходимо выработать, в первую очередь, критерии оптимальности магнитной системы машины. При проектировании электродвигателей для автономных объектов часто требуется разработка машины минимального объема при заданном диаметре корпуса и ограничениях накладываемых конкретным техническим заданием. Магнитная система машины считается оптимально спроектированной, если энергия магнитного поля, создаваемая постоянным магнитом, достигает максимума [11]. Условие максимума внешней энергии постоянного магнита связано с внутренней энергией простым соотношением только для однородно намагниченных постоянных магнитов
W |
M max |
|
ФМ FM |
|
Bd Hd |
V , |
(1) |
|
|
||||||
|
2 |
|
2 |
M |
|
||
|
|
|
|
|
|||
где ФМ – магнитный поток в нейтральном сечении постоянного магнита;
FM – МДС магнита; SM – сечение постоянного магнита; LM – длина магнита; VM – объем магнита; Вd и Hd – индукция и напряженность магнитного поля, соответствующие максимуму магнитной энергии магнита.
Энергия магнитного поля в воздушном зазоре, соответствующая WMmax , равна
99
|
|
B |
H |
ср |
|
|
B2 |
|
|
W |
|
ср |
|
V |
|
ср |
S L , |
(2) |
|
|
2 |
|
2 0 |
||||||
|
|
|
|
|
|
|
|
где B ср и H ср – средние значения индукции и напряжённости магнитного поля в воздушном зазоре; V – объём воздушного зазора; μ0 – магнитная постоянная; S – сечение воздушного зазора; L – активная длина воздушного зазора.
Применительно к электрическим машинам получаем
W |
|
B2ср |
S L |
|
|
Ф2 |
|
|
S L |
, |
(3) |
|||
2 |
0 |
|
L |
2 |
2 |
0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
где Ф – рабочий магнитный поток с полюса машины; – полюсное деление электродвигателя.
На основании (3) получаем
W |
Ф2 S L |
k, |
(4) |
где Ф * – магнитный поток на единицу длины магнитной системы, Вб/м;
k 1 2 0 2 .
2 0 2 .
Первую целевую функцию или критерий оптимальности можно получить из (4) выразив W в относительных единицах
K |
1 |
|
W |
|
f , |
(5) |
||
W |
||||||||
|
|
|
|
|
||||
|
|
|
M max |
|
|
|
||
|
|
|
нм |
|
, |
(6) |
||
|
|
hм |
|
|||||
|
|
|
|
|
|
|
||
где нм – величины немагнитного зазора; hм высота полюса магнита.
Вторую целевую функцию можно получить из условия обеспечения максимума момента, развиваемого электродвигателем при заданном значении плотности тока в проводниках (j = const). Электромагнитный момент трёхфазного БДПТ можно получить из
100