

Учебное пособие 800600
.pdfследующего уравнения
M m1 C Ф I , |
(7) |
где Ф – рабочий магнитный поток с полюса; I – действующее значение тока в фазе электродвигателя; m1 – число фаз.
C |
2 |
p W k |
|
|
2 |
р N k |
|
, |
(8) |
2 |
|
4 |
|
||||||
|
1 |
об |
|
|
об |
|
|
где р – число пар полюсов машины; W1 – число последовательно соединённых витков фазы; N – число активных проводников фазы; kоб
– обмоточный коэффициент.
I J S kзм , |
(9) |
где J – плотность тока в проводниках фазы; S – площадь поперечного сечения воздушного зазора; kзм – обмоточный
коэффициент. |
|
|
|
|
|
|
|
|
|
|
|
Уравнение (6) можно преобразовать к следующему виду |
|
||||||||||
|
|
M Ф S k2 , |
|
(10) |
|||||||
где k2 – постоянный коэффициент. |
|
|
|
||||||||
|
|
|
|
|
|
p J k |
|
|
|
|
|
k |
|
|
|
2 |
|
k |
|
, |
(11) |
||
2 |
4 |
|
зм |
об |
|||||||
|
|
|
|
|
|
|
|||||
где р – число пар полюсов; J – плотность тока в проводниках; kзм
– коэффициент заполнения воздушного зазора медью; kоб – обмоточный коэффициент.
По аналогии с уравнением (4) введём в уравнение (9) величину
Ф *
M Ф S L k2 . |
(12) |
Вторую целевую функцию или критерий оптимальности можно получить из (11) выразив М в относительных единицах
101
K |
|
|
M |
f , |
(13) |
2 |
|
||||
|
|
m1max |
|
||
где m1max – базисное значение момента необходимое для получения критерия оптимальности в безразмерной форме. Например, максимальное значение момента вращения единичной машины [16], которое в самых мощных использованных машинах не превышает
5…6 Н∙см.
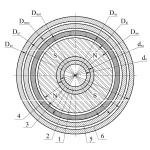
Исследование поведения критериев K1 и K2 осуществлялось при помощи программы ELCUT. Моделирование магнитного поля выполнено для двух вариантов машин с двухполюсным (2р = 2) и четырёхполюсным (2р = 4) индуктором. При моделировании постоянными сохранялись следующие величины: внешний диаметр патрона Dпе = 4 мм; внутренний диаметр патрона Dпi = 3.2 мм; диаметр корпуса Dке = 12.5 мм; внешний диаметр магнитопровода Dмпе = 11.5 мм; внутренний диаметр магнитопровода Dмпi = 10 мм. Изменялся внешний диаметр магнита Dме и соответственно высота полюса магнита hм (табл. 1 и 2).
1 – патрон; 2 – втулка (магнитная); 3 – постоянный магнит; 4 – обмотка якоря; 5 – магнитопровод; 6 – корпус.
Рис. 1. Общий вид поперечной геометрии четырехполюсной магнитной системы электродвигателя с полым якорем
102
Таблица 1
Оптимизация поперечной геометрии машины с полым якорем при числе полюсов индуктора 2р = 2
№ |
Dме, |
hм , |
м, |
|
Ф , |
S , |
S ∙Ф∙10-6 |
S∙Ф2∙10-12 |
К1 |
К2 |
|
|||
|
|
мм |
мм |
мм |
Вб/м |
мм2 |
Вб∙м, |
Вб2∙м, |
|
|||||
1 |
|
6.5 |
1.25 |
1.75 |
1.4 |
0.003328 |
45.36 |
|
0.1509 |
502.3 |
|
0.440 |
0.0845 |
|
2 |
|
7.0 |
1.50 |
1.50 |
1.0 |
0.004102 |
40.06 |
|
0.1643 |
674.1 |
|
0.445 |
0.0920 |
|
3 |
|
7.5 |
1.75 |
1.25 |
0.7 |
0.00495 |
34.40 |
|
0.1704 |
844.6 |
|
0.423 |
0.095 |
|
4 |
|
8.0 |
2.00 |
1.00 |
0.5 |
0.005893 |
28.27 |
|
0.1668 |
983.3 |
|
0.382 |
0.0930 |
|
5 |
|
8.5 |
2.25 |
0.75 |
0.3 |
0.006878 |
21.79 |
|
0.1499 |
1030.8 |
|
0.356 |
0.0839 |
|
6 |
|
9.0 |
2.50 |
0.50 |
0.2 |
0.007887 |
14.92 |
|
0.1177 |
928.2 |
|
– |
0.0659 |
|
7 |
|
9.5 |
2.75 |
0.25 |
0.1 |
0.009047 |
7.66 |
|
0.069 |
626.8 |
|
– |
0.0386 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
||
|
|
|
Оптимизация поперечной геометрии машины |
|
|
|||||||||
|
|
с полым якорем при числе полюсов индуктора 2р = 4 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
|
Dме, |
hм , |
м, |
|
Ф , |
S , |
|
S ∙Ф∙10-6 |
S ∙Ф2∙10-12 |
|
К1 |
К2 |
|
|
|
мм |
мм |
мм |
Вб/м |
мм2 |
Вб∙м, |
Вб2∙м, |
|
|
||||
1 |
|
6.5 |
1.25 |
1.75 |
1.4 |
0.001648 |
45.36 |
|
0.0748 |
123 |
|
0.436 |
0.084 |
|
2 |
|
7.0 |
1.50 |
1.50 |
1.0 |
0.002156 |
40.06 |
|
0.0864 |
186 |
|
0.489 |
0.097 |
|
3 |
|
7.5 |
1.75 |
1.25 |
0.7 |
0.00274 |
34.40 |
|
0.0947 |
259 |
|
0.517 |
0.106 |
|
4 |
|
8.0 |
2.00 |
1.00 |
0.5 |
0.003441 |
28.27 |
|
0.0973 |
335 |
|
0.520 |
0.109 |
|
5 |
|
8.5 |
2.25 |
0.75 |
0.3 |
0.004243 |
21.79 |
|
0.0925 |
392 |
|
0.475 |
0.104 |
|
6 |
|
9.0 |
2.50 |
0.50 |
0.2 |
0.005149 |
14.92 |
|
0.0768 |
396 |
|
0.381 |
0.086 |
|
7 |
|
9.5 |
2.75 |
0.25 |
0.1 |
0.006344 |
7.66 |
|
0.0486 |
308 |
|
0.239 |
0.054 |
|
Функции К1( ) и К2( ) также имеют достаточно пологий характер (рисунки 2 и 3). Максимумы функций находятся практически в одной зоне близко друг другу. При исследовании двухполюсной машины получены следующие результаты. Максимум функции К1( ) находится в диапазоне значений = 0.5…0,7). Максимум функции К2( ) находится в диапазоне значений = 0.4…0,6. Все рассмотренные варианты могут быть реализованы, в рамках существующей технологии изготовления полого якоря (ЗАО «МЭЛ» г. Воронеж). Возможно применение обмотки ортоциклического типа, не имеющей
103

утолщения в лобовой части. |
|
|
|
|
|||||||||||
0.550 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.120 |
0.515 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.113 |
0.480 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.106 |
0.445 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.099 |
0.410 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.092 |
K1 0.375 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 0.085 |
0.340 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.078 |
0.305 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.071 |
0.270 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.064 |
0.235 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.057 |
0.200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.050 |
0.0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1.0 |
1.1 |
1.2 |
1.3 |
1.4 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1.0 |
1.1 |
1.2 |
1.3 |
1.4 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Зависимости критериев К1 и К2 от для электродвигателя с полым якорем при числе полюсов 2р = 4.
0.45
0.44
0.43
0.42
0.41
K1 0.40
0.39
0.38
0.37
0.36
0.35
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
0.100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.094 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.087 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.081 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.074 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 0.068 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.061 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.055 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.048 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.042 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.035 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1.0 |
1.1 |
1.2 |
1.3 |
1.4 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3. Зависимости критериев К1 и К2 от для электродвигателя с полым якорем при числе полюсов 2р = 2.
Воронежский государственный технический университет
104

Энергетика
105
УДК 62.519
Р.Ю. Ничуговский, Д.А. Мамонтов, В.Б. Фурсов, В.А.Сергеев
МОДЕЛИРОВАНИЕ НЕПОЛНОФАЗНЫХ РЕЖИМОВ РАБОТЫ ЭНЕРГОСИСТЕМ
Обсуждаются результаты математического моделирования неполнофазных режимов в системах электроснабжения с несколькими ступенями трансформации напряжения
Ключевые слова: неполнофазные режимы работы, погонные параметры линии, коммутационные перенапряжения
Неполнофазные режимы в электроэнергетике встречаются, как правило, в случае обрыва одной или двух фаз питающего напряжения без замыкания на землю на стороне высшего напряжения распределительных подстанций. Характерными случаями обрывов могут быть:
•обрыв шлейфа на анкерной высоковольтной опоре;
•отсутствие контакта в полюсе высоковольтного коммутационного аппарата (выключателя или разъединителя);
•обрыв фазы кабеля вследствие дефектов соединительной
муфты;
•обрыв фазы воздушной линии в пролете с падением в глубокий снег, который также является хорошим изолятором;
•обрыв провода у гирлянды изоляторов, в том числе у натяжного ролика гирлянды.
Во всех указанных случаях потребляемые токи на стороне низкого напряжения существенно возрастают и могут протекать до отключения их элементами разнообразных токовых защит. Вопрос о величине и длительности действия возможных перенапряжений на стороне низкого напряжения потребительских подстанций изучен менее подробно.
Аналитические расчеты неполнофазных режимов выполняются с большим количеством упрощающих допущений [1,2], нередко искажающих физическую картину процесса. К числу таких допущений относятся: пренебрежение емкостными токами замыкания на землю в линиях напряжением ниже 110 кВ, не учет вида нагрузки (активная или пассивная) для определения величин перенапряжений
106
на стороне низкого напряжения, а также начальной фазы напряжения питающей линии в момент обрыва и ряд других допущений.
Задачей настоящей работы был анализ уровня возможных перенапряжений, возникающих в сетях потребителя и приводящий в ряде случаев, к выходу из строя «интеллектуального» (smart) оборудования.
Анализ судебной практики арбитражных судов Воронежской области и Центрального федерального округа [3] показал, что в период с 2004 по 2016 год имелось не менее 15 случаев возникновения неполнофазных режимов в воздушных и кабельных сетях напряжением 35-110 кВ, вызвавших выход из строя систем управления (контроллеров) общепромышленного станочного оборудования или smart бытовых приборов. Причинами выхода из строя являлись ошибки в проектировании средств защиты от перенапряжений в составе комплекса защит низковольтного оборудования.
Специалистами проектных служб внутриобъектового электроснабжения практически не применяется современный комплекс государственных стандартов ГОСТ Р 50571.ХХ «Электроустановки зданий», разработанный в дополнение к соответствующим главам ПУЭ. В качестве объяснений таким действиям опытных специалистов нами предполагается сложность применения требований, например стандарта [4], без детального расчета величины и длительности действия возможного перенапряжения.
На наш взгляд, упростить применение нормативной документации в конкретном случае может численное моделирование электроэнергетической системы с несколькими уровнями напряжений. Пример такой математической модели представлен на рисунке 1.
В представленной модели имеются две трансформаторных подстанции центральная Т1 (110/35 кВ) и потребительская Т2(35/10; 35/6 или 35/0,4 кВ) соединенные между собой воздушными или кабельными линиями. Нагрузкой подстанции Т2 являлась группа электродвигателей. Варьировались: длины и погонные параметры линий электропередач, мощности электродвигателей и трансформаторов обеих подстанций, а также группы соединений обмоток трансформаторов и начальная фаза напряжения питания в момент обрыва.
Результаты моделирования представлены на рисунках 2 – 4.
107

Рис. 1. Структура математической модели в операционной среде
Matlab Simulink
Рис. 2. Зависимость коммутационных перенапряжений в сети 0,4кВ от мощности двигателей
108

Рис. 3. Зависимость коммутационных перенапряжений в сети 0,4кВ от длины линии электропередач
Результаты расчетов коммутационных перенапряжений в сети 0,4кВ
|
|
Перенапряжение |
Длительность |
Расчетный режим |
|
на шинах Т1, В |
перенапряжения, мс |
|
|
|
|
Обрыв в сети 35 кВ |
|
|
|
на холостом ходу |
|
440460 |
до 100 |
подстанции Т1 |
|
|
|
Запуск поочередно |
|
|
|
двух двигателей |
при |
445570 |
до 150 |
обрыве фазы СН |
|
|
|
Запуск одновременно |
|
|
|
двух двигателей |
при |
430560 |
до 150 |
обрыве фазы СН |
|
|
|
Запуск поочередно трех |
|
|
|
двигателей при обрыве |
410465 |
до 150 |
|
фазы СН |
|
|
|
Норма по [6] |
|
Не более 500 |
Не более 100 |
Рассмотрение результатов моделирования позволяет сделать следующие выводы:
109
1.Обрыв в сети высокого напряжения подстанции Т2 приводит
ксущественной несимметрии напряжений в низковольтной сети 0,4
кВ. Однако, работоспособность силового электрооборудования сохраняется, а в ряде случаев рабочие характеристики электродвигателей ухудшаются незначительно.
2. В сети низкого напряжения могут возникать перенапряжения. Их величина зависит от погонных параметров линии, в большей степени от емкостной проводимости фаз на землю.
3.Величины перенапряжений существенно меньше для трансформаторов с группой соединения обмоток Yн/Y, чем схема Yн /Δ при одинаковой мощности трансформаторов и нагрузки, что объясняется значительно бóльшей величиной сопротивления токам нулевой последовательности первой схемы относительно второй.
4.Длительность перенапряжений зависит от характера переходного процесса (колебательного или апериодического) и может составлять от десятков миллисекунд до нескольких секунд.
5.По окончании переходного процесса, связанного с обрывом фазы, несимметрия напряжений в сети НН уменьшается и составляет не более 55%.
6.Сверхтоки при запуске электродвигателей при неполнофазном питании достигают 7-10 кратных значений по отношению к номинальному току электродвигателей. При использовании двигателей одинаковой мощности в наихудших условиях запуска будет находиться двигатель запускающийся вторым по очереди. Ток в общей поврежденной фазе таких электродвигателей составляет 1.5-3 номинального тока. Большие значения токов относятся к электродвигателям бóльшей мощности.
7.Величины перенапряжений в 400-500В неопасны для изоляции современных асинхронных электродвигателей, которая в предельном случае должна выдерживать перенапряжения порядка
1500 В. Для smart-оборудования эти величины оказываются критически важными для работоспособности информационной части управляющей системы. Происходит не только программный сбой в настройках контроллера, но и полный выход его из строя вследствие электрического пробоя изоляции на корпус.
8. Традиционные средства защиты от перенапряжений (разрядники, ограничители перенапряжений, варисторы и т.п.) ориентированы, в основном, на отключение атмосферных перенапряжений, т.е. имеют амплитуду отсечки более 1,5 кВ и быстродействие на уровне миллисекунд. Сверхбыстродействующие
110