

Учебное пособие 800579
.pdf= ∙ ∙ ∙ ,мм,
где - перемещение рейки или реечного колеса, мм,
–частота вращения вала реечного колеса, об/мин,
-модуль зацепления, мм,
-число зубьев реечного колеса.
-винтовой:
где – |
= ∙ = ∙ ∙ ,мм, |
|
перемещение гайки или винта, ммЮ |
–ход винта, мм,
-шаг винта, мм,
-число заходов винта.
-храповой:
хр = , хр
где – число зубьев, захватываемых собачкой за 1 оборот вала;
хр – число зубьев храпового колеса.
50
- мальтийский:
м = 1 ,
где – число пазов мальтийского механизма. 4. Суммирующие механизмы:
- дифференциал с коническими колесами:
=±
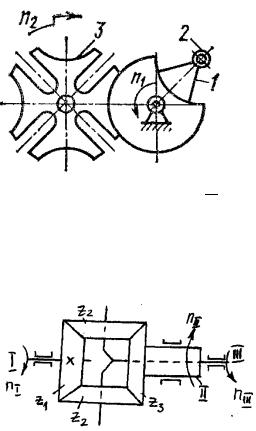
6.Кинематическая схема токарно-винторезного станка
16К20
Кинематическую схему токарного станка можно разделить на две кинематические цепи: привода главного движения и привода подачи.
51
Изучение кинематической схемы станка 16К20 целесообразнее осуществлять по блок-схемам кинематических цепей приводов.
1) Привод главного движения
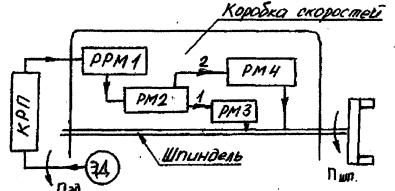
Главным движением является вращательное движение шпинделя станка. Рассмотрим цепь движения привода главного движения по блок-схеме, представленной на рис. 2.1.
Рис. 2.1. Блок-схема привода главного движения: ЭД – главный электродвигатель; РРМ1 – реверсивно-регулирующий механизм №1; РМ2 – регулирующий механизм №2; РМЗ – регулирующий механизм №3;
РМ4 – регулирующий механизм №4 («Перебор»)
Вращение вала электродвигателя (ЭД) через клиноременную передачу (КРП) передается на входной вал коробки скоростей. Кинематическая цепь коробки скоростей состоит из 4-х регулирующих механизмов, три из которых представляют скользящие блоки, а один – механизм перебора (РМ4), и одного реверсивного, в котором используется фрикционная муфта Мф и промежуточный ("паразитный")
52

блок шестерен. Включением муфты Мф влево реверсивный механизм обеспечивает прямое вращение шпинделя, при котором, в основном, и осуществляется процесс резания.
С помощью коробки скоростей можно обеспечить 24 различные частоты прямого вращения шпинделя в пределах от
12,5 до 1600 об/мин.
Уравнение кинематического баланса цепи главного
движения можно представить в общем виде: |
|
||||
шп = |
|
эд ∙ эд шп |
(об/мин), |
(1) |
|
где |
–шп |
– частота вращения шпинделя станка, об/мин; |
|
||
эд |
|
|
|
||
частота вращения вала электродвигателя (по схеме |
|||||
|
об/мин); |
|
|
||
эд = 1500 |
|
|
|
|
|
- общее передаточное отношение от электродвигателя до шпинделя;
крп = ∙0,98 – передаточное отношение от вала электродвигателя до шпинделя;
- передаточные отношения в РРМ1 при прямом вращении шпинделя;
|
|
|
- |
передаточные |
|
отношения, |
||
обеспечиваемые в РМ2; |
|
|
|
|
|
|||
|
|
|
- передаточные отношения в РМЗ при |
|||||
шт = 200…1600об/мин; |
|
|
– |
передаточные |
||||
рм |
|
⁄ |
|
|
|
|
|
|
= |
45 45 |
∙18⁄72∙30⁄60 |
|
|
|
|||
|
15⁄60 |
|
|
|
||||
|
|
|
|
шт = 12,5…160 |
об/мин. |
|||
отношения в механизме РМ4 при |
|
|
|
|||||
53
Подставив в уравнение (1) числовые значения передаточных отношений ступеней регулирования механизмов в цепи привода главного движения, получим общее уравнение кинематического баланса цепи главного движения для частот вращения шпинделя в пределах от 12,5 до 1600 об/мин.
2) Привод движения подачи
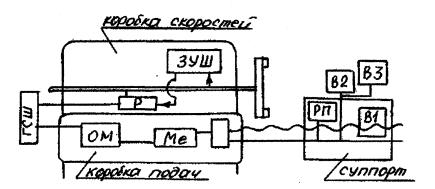
Привод подачи составлен из механизмов, которые размещены в коробке скоростей (в том числе звено увеличения шага
– ЗУШ и реверсивный механизм – Р), гитаре сменных шестерен – ГСШ, коробке подач (обратимый механизм – ОМ, меандр – Me и переключающие муфты) и суппорте станка (реечная – РП и винтовые передачи – Bl, B2, ВЗ ) (См. блоксхему на рис. 2.2).
Рис. 2.2. Блок-схема привода движения подачи: ЗУШ – звено увеличения шага резьбы; Р – реверсивный механизм (трензель); ГСШ – гитара сменных шестерен;
ОМ – обратимый регулирующий механизм; Me – регулирующий механизм (меандр); РП – реечная передача; В1, В2, ВЗ – винтовые передачи
54
Механизм звена увеличения шага (ЗУШ) используется только при нарезании резьбы с увеличенным шагом, он расположен в коробке скоростей. В качестве ЗУШ используется механизм РМ4, только движение в нем подается от шпинделя (т.е. в обратном направлении).
Для осуществления подачи, вращение от шпинделя через реверсивный механизм (Р) и гитару сменных шестерен (ГСШ) поступает на вход коробки подач, состоящей из двух регулирующих механизмов: обратимого (ОМ) и меандра (Me), и переключающих муфт M1, М2, М3 и М4. С коробки подач движение через ходовой валик или ходовой винт передается в фартук суппорта, а затем на исполнительные механизмы, преобразующие вращательное движение в поступательное: реечную (РП) и винтовые передачи (В1, В2, ВЗ). Реечная передача (РП) используется для осуществления продольной подачи, а винтовые: Bl – для нарезания резьбы, В2 – поперечной и ВЗ - наклонной подач.
Кинематическая цепь подачи станка позволяет осуществлять точение с продольной, поперечной и наклонной подачами, а также нарезание метрической, модульной, питчевой и особоточной резьб.
Рассмотрим кинематические цепи, по которым движение передается от шпинделя к исполнительным механизмам суппорта при осуществлении различных видов подач.
Уравнение кинематической цепи любой подачи можно представить в общем виде: = 1об шп ∙ общ ∙ исп, (мм/мин),
где общ = пер ∙ пост – общее передаточное отношение движения от шпинделя до исполнительного механизма (реечного или винтового),
пер = ом ∙ ме – переменное передаточное отношение, изменяющееся с помощью регулирующих механизмов в коробке подач (обратимый механизм – ОМ и меандр – Me);
пост - постоянное передаточное отношение, равное произведению передаточных отношений всех передач, составляющих кинематическую цепь той или иной подачи
55

(кроме передач регулирующих механизмов), том числе и передаточное отношение гитары сменных шестерен (ГСШ):
гсш = ∙ , где = 40; = 86; = 64.
Уравнение продольной подачи
При точении с продольной подачей ( прод) в коробке подач включены (замкнуты) муфты М3 и M4, при выключенных (разомкнутых) муфтах M1 и М2. Движение от шпинделя передается к реечной передаче – РП в суппорте и уравнение кинематического баланса пепи продольной подачи имеет вид:
прод =– |
1об шп ∙ общ ∙ |
∙ |
|
∙ |
рк |
, (мм/об), |
|
|
где |
модуль реечного зацепления, мм, |
|
||||||
рк – число зубьев реечного колеса. |
|
|||||||
Уравнение поперечной подачи |
|
|
||||||
Поперечная |
подача ( |
|
|
) |
осуществляется с |
помощью |
||
|
|
|
поперечных салазках суппорта. |
|||||
винтового механизма (В2) в |
поп |
|
|
|
|
|||
Уравнение |
цепи |
движения поперечной |
подачи |
|||||
незначительно отличается от продольной подачи и имеет вид:
поп = 1об шп ∙ общ ∙ |
хв |
, (мм/об), |
||
где |
хв |
– шаг ходового винта винтовой передачи В2. |
||
|
|
|
|
|
Уравнение наклонной подачи
Наклонная подача ( н) осуществляется винтовой передачей (ВЗ), вмонтированной в поворотных резцовых салазках. Уравнение цепи движения наклонной подачи имеет вид:
н = 1об–шпшаг∙ общ ∙ |
хв |
, (мм/об), |
||
где |
хв |
ходового винта винтовой передачи ВЗ. |
||
|
|
|
|
|
56

Кинематические цепи нарезания резьбы
Нарезание резьб любого профиля и размерности осуществляется с помощью винтовой передачи В1, при этом движение от шпинделя передается на ходовой винт через замкнутую муфту – Мз, которая отключает движение ходового валика и передает вращение на ходовой винт, а затем через разъемную гайку поступательным движением перемещает суппорт с резцом.
В зависимости от размерности резьбы гитара сменных шестерен – ГСШ обеспечивает различные передаточные отношения.
Например:
-при нарезании метрических и дюймовых резьб
|
используется ГСШ с передаточными отношениями: |
||||||||||
|
|
|
|
|
|
40 |
86 |
40 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
- |
при нарезании |
модульной и питчевой резьб: |
|||||||||
|
∙ = 86∙ |
64 = |
64 , |
||||||||
4086
∙= 73 ∙36 ,
Уравнение при нарезании метрической резьбы
Метрическая резьба задается шагом « м», измеряемым в мм. При этом в коробке подач включены муфты М2, М3, М4 и уравнение цепи имеет вид: м = 1об шп ∙ общ ∙ хв , (мм),
где хв - шаг ходового винта винтовой передачи В1.
Уравнение при нарезании дюймовой резьбы
Дюймовая резьба задается шагом, измеряемым числом ниток ( ) на один дюйм (1"). Для приведения размерности шага из дюймовой системы измерения в метрическую (т.к. шаг ходового винта измеряется в мм) необходимо использовать формулу:
57

д = 25,4,(мм),
где 25,4 – число миллиметров в 1 дюйме;
– число ниток на 1 дюйм.
При нарезании дюймовой резьбы используется ГСШ, как для метрической резьбы ( = ). В коробке подач включена
только муфта М2, остальные муфты M1, М3 и М4 выключены, за счет чего движение на обратимый механизм (ОМ) поступает наоборот (как бы перевернутым).
Кинематическую цепь дюймовой резьбы можно описать следующим уравнением: д = 1об шп ∙ общ ∙ хв , (мм).
Уравнение для нарезания специальной и особоточной резьбы
При нарезании специальной (с нестандартным шагом) и резьбы повышенной точности в коробке подач замыкаются муфты M1 и М2, тем самым из кинематической цепи исключается ряд передач в регулирующих механизмах и уменьшается погрешность шага нарезаемой резьбы.
Уравнение кинематической цепи имеет вид:
от |
|
об шп |
30 |
|
|
|
|
хв |
|
|
|
|
|
Д |
|
||||
|
|
|
45 |
|
|
|
|
особоточной или |
|
Настройка |
=на1 |
заданный∙ ∙ ∙ |
|
шаг∙ |
|||||
|
,(мм). |
||||||||
специальной резьбы осуществляется подбором сменных шестерен в ГСШ: вместо имеющихся «К, L, и N» рассчитываются и устанавливаются шестерни «А, В, С и Д».
Уравнение для нарезания резьб с увеличенным шагом
Для нарезания резьбы с увеличенным шагом (более 7 мм) необходимо использовать в цепи механизм – "звено увеличения шага (ЗУШ)".
58
При этом движение от шпинделя на реверсивный механизм (Р) поступает через ЗУШ (обратный механизму перебора) и передачу (45/45) (на схеме показано пунктиром).
Уравнение для нарезания резьбы с увеличенным шагом имеет вид:
ув = 1об шп ∙ зуш ∙ общ ∙ хв ,(мм).
59