

Учебное пособие 800568
.pdfваны термическим, радиационным, механическим и другими воздействиями, увеличивающими концентрацию дефектов, в первую очередь, – плотность дислокаций.
Общий вид уравнения химической реакции, протекающей на поверхности раздела LiF-LiTaO3, можно представить, как:
LiTaO3+F▪+SF5▪+…=LiF↓+TaF5↑+O2↑+OF2↑+TaOF3+…
Второй этап связан с ростом ядер новой фазы с образованием в конечном итоге сплошного слоя. Структура пленки, полученная методом РЭМ, представлена на рисунке [3].
(а)
(б)
Структура пленки LiF, при увеличении x5000 (а) и х50000 (б)
Скорость плазмохимического травления в данный момент достигает насыщения и является максимальной. Анализ структуры
20
пленки показывает наличие пор неправильной геометрической формы размерами от 50 до 500 нм. Согласно классификации нанопористых материалов, установленной Международным союзом теоретической и прикладной химии данная пленка является макропористой структурой [4].
Последующий процесс травления связан с ростом слоя LiF. Химическая реакция на третьем этапе осложняется диффузией ХАЧ через поры и, как следствие, снижением суммарной скорости реакции.
Модель описания кинетики процесса на третьем этапе представляет собой сложную задачу ввиду трудности выбора лимитирующей стадии, которая зависит от технических и технологических параметров. При плазмохимическом травлении обрабатываемая поверхность подвергается одновременному воздействию как химически, так и энергетически активных частиц и излучения. Особенность подобного рода процессов связана не только многостадийностью, но также и сменой условий протекания во времени, приводящих к изменению соотношений между скоростями различных стадий по мере протекания реакции и, как следствие, возможности перехода из одной макрокинетической области в другую. В связи с этим, как уже было упомянуто выше, встает вопрос применимости стационарного приближения и определения лимитирующей стадии процесса.
В случае гетерогенных реакций стадии адсорбции и десорбции являются обязательными и могут оказывать ключевое влияние на кинетику протекания процесса. Для описания данного процесса можно использовать модель активных центров ЛэнгмюраХиншельвуда. При этом предполагается, что адсорбционные и десорбционные процессы равновероятны для всех участков поверхности, и отсутствует взаимодействие частиц друг с другом. В случае наличия твердой фазы продукта происходит адсорбция ХАЧ с рекомбинацией без взаимодействия с поверхностью, либо диффузия ХАЧ через слой продукта с последующей химической реакцией, после чего происходит процесс десорбции газообразных продуктов, которая может быть спонтанной, либо требующей дополнительной активации.
Рассматривая конкретные модели твердофазных взаимодействий и связанные с ними кинетические уравнения, их можно разделить, как минимум, на две группы в соответствии с природой ли-
21
митирующей стадии процесса. Лимитирующими могут быть: а) взаимодействие исходных компонентов в реакционной зоне на границе раздела фаз (адсорбционно-десорбционные процессы, а также собственно химическая реакция); б) объемная диффузия реагентов через слой продукта реакции (взаимная или односторонняя). В данном случае необходимо учитывать всю совокупность технологические факторы процесса.
Выводы
Представлена структура макропористой пленки LiF, полученная с помощью растрового электронного микроскопа JEOL JSM6610A. Описан механизм поэтапного формирования пленки LiF. Приведена обобщенная физико-химическая модель протекания процесса плазмохимического травление танталата лития в плазме
SF6.
Литература
1.И.В. Коняев, Л.Н. Владимирова, Е.Н. Бормонтов, В.А. Буслов, Е.А. Сизаск / «Особенности кинетики травления ниобата и танталата лития во фторсодержащей плазме // Вестник ВГТУ. – 2017. – Т. 13. – № 3. – C. 123 - 127.
2.Киперман С.Л. Основы химической кинетики в гетерогенном катализе / С.Л. Киперман. – М.: Химия, 1979. – 349 с.
3.Коняев И.В. Анализ морфологии фторида лития в
процессе плазмохимического травления LiTaO3 / И.В. Коняев, И.И. Бородкин, Е.А. Сизаск, В.А. Буслов, О.Г. Викин // Твердотельная электроника, микроэлектроника и наноэлектроника: межвуз. сб. науч. тр. – Воронеж: ВГТУ. – 2018. – № 17. – С. 110-115.
4.IUPAC. Compendium of Chemical Terminology, 2nd ed. (the "Gold Book"). Compiled by A. D. McNaught and A. Wilkinson. Blackwell Scientific Publications, Oxford (1997). DOI: 10.1351/goldbook.
Воронежский государственный университет АО «Научно-исследовательский институт электронной техники»,
г. Воронеж
22

УДК 621.3.049.779
Г.И. Липатов
ПРИНЦИП ДЕЙСТВИЯ И ХАРАКТЕРИСТИКИ ОТКЛИКА МЭМС-АКСЕЛЕРОМЕТРА
На основе модельного представления проанализированы характеристики отклика МЭМС-акселерометра.
В емкостных акселерометрах смещение контрольной массы в результате воздействия ускорения приводит к изменению взаимного расположения вставленных друг в друга систем плоских электродов, одна из которых связана с подвижной массой, а другая является фиксированной, и изменению считываемой дифференциальной емкости образуемой ими мостовой схемы. При работе в режиме силовой балансировки и при проведении самодиагностики используется система обратной связи через приводные электроды. Типичная конструкция дифференциального емкостного МЭМС-акселеро- метра приведена на рис. 1.
уу
23

Чувствительность акселерометра, определяемая как отношение выходного напряжения к вызвавшему его входному ускорению, может быть представлена в виде произведения трех сомножителей:
S |
V |
|
x C V |
, |
||
0 |
|
|
0 |
|||
|
|
|
|
|
||
|
a |
|
a |
x |
C |
|
где первый сомножитель представляет собой механическую чувствительность — перемещение x контрольной массы в результате действия внешнего ускорения a; второй — электростатическую чувствительность — изменение дифференциальной емкости C в результате перемещения подвижного электрода между двумя фиксированными электродами; третий — чувствительность электронной схемы преобразования емкости в выходное напряжение V0. Произведение двух первых сомножителей есть емкостная чувствительность акселерометра, зависящая от его конструкции. Чувствительность электронной схемы зависит только от схемотехники преобразователя емкость/напряжение. Типичное значение чувствительности акселерометров составляет 5 — 30 мВ/g.
Если инерционная масса (ИМ) контрольной массы m, коэффициент жесткости упругого подвеса k и потери энергии, влияющие на движение контрольной массы, характеризуются постоянной демпфирования D, то микроакселерометр может быть представлен системой второго порядка пружина—масса—демпфер с одной степенью свободы (рис. 2).
Пусть положение материальной точки в системе, связанной с движением контролируемого объекта, характеризуется координатой xк, а в системе, связанной с движением контрольной массы — координатой xм. Эти координаты одной и той же точки в двух различных системах отсчета, из которых вторая движется относительно первой со скоростью v, связаны друг с другом соотношением Галилея xк=xм+vt. При этом подразумевается, что ход времени одинаков в обеих системах: t=t’.
При перемещении контролируемого объекта с ускорением а на расстояние xк инерционная масса перемещается относительно него на расстояние x=vt=xк–xм (на рис. 2 указано положительное направление x) и упругий подвес создает возвращающую силу
Fk kx, |
(1) |
24

а) б)
Рис. 2. Механическая модель акселерометра (а) и диаграмма сил, действующих на свободное тело массы m (б)
При чисто вязкостном демпфировании сила противодействия со стороны демпфера пропорциональна скорости x перемещения массы:
F |
Dv Dx, |
D |
|
(2)
Согласно второму закону движения Ньютона в инерциальной системе отсчета под действием приложенных сил масса приобретает такое ускорение, что сумма всех сил, действующих на массу, равна массе, умноженной на приобретаемое ею ускорение:
|
|
F |
mx. |
(3)
Тогда одномерное уравнение движения для системы можно записать в виде
kx Dx F mx,
(4)
где F является любой внешней силой, действующей на массу, а именно F=ma. После перегруппировки получим
mx Dx kx F. |
(5) |
|
Очевидно, что при статическом воздействии уравнение (5) приобретает вид
kx F ma,
откуда
25
x |
m |
a |
a |
|
a |
, |
|
k |
k / m |
2 |
|
||||
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
0 |
|
|
то есть механическая чувствительность акселерометра |
2 |
||||||
Sм 1/ 0 |
|||||||
обратно пропорциональна квадрату собственной циклической частоты свободных незатухающих колебаний контрольной массы акселерометра (см. определения ниже).
В случае высокоскоростных воздействий уравнение (5) приобретает вид
|
mx F ma, |
откуда |
x a , то есть контрольная масса перемещается с тем же |
ускорением, что и контролируемый объект, и устройство ведет себя как сейсмометр, регистрирующий колебания.
Передаточную функцию от силы F к смещению x можно записать в виде
W (s) |
X (s) |
|
|
1 |
|
|
1/ k |
|
|
|
|
|
|
1/ k |
|
|
|
, |
|||||||
F(s) |
2 |
Ds k |
1 (D / k)s |
|
|
2 |
1 2 s / |
|
s |
2 |
/ |
2 |
|||||||||||||
|
ms |
|
(m / k)s |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
0 |
|
0 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6) |
||
где |
|
k / m |
— циклическая собственная частота свободных не- |
||||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
затухающих колебаний (при =0); |
|
D / 2 km =1/(2Q) — коэффи- |
|||||||||||||||||||||||
циент демпфирования; Q |
km / D |
— добротность системы. |
|
|
|
|
|||||||||||||||||||
Модуль и фаза частотной передаточной функции равны соот- |
|||||||||||||||||||||||||
ветственно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
W ( j ) |
|
|
|
|
|
1/ k |
|
|
|
|
|
|
|
|
|
(7, а) |
||||||
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
2 |
|
2 |
|
|
|
||||||
|
|
|
|
|
|
[1 ( / |
|
) |
] |
( / |
|
) |
/ Q |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
и
|
/ |
|
|
|
( j ) arctg |
0 |
|
|
. |
[1 ( / |
|
2 |
||
|
) |
]Q |
||
|
|
|||
|
0 |
|
|
|
(7, б)
Таким образом, частотный онного действия
x |
|
|
1/ k |
|
|
|
ma |
||
|
|
|
|
|
|
|
|
||
[1 ( / |
) |
2 |
] |
2 |
( / |
) |
2 |
/ Q |
2 |
|
|
|
|
||||||
0 |
|
|
|
|
0 |
|
|
|
|
отклик преобразователя инерци-
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
1/ |
|
|
|
|
|
(8) |
|||
|
|
|
|
|
0 |
|
|
|
|
a, |
|
|
|
|
|
|
|
|
|
|
|
||
[1 ( / |
) |
2 |
] |
2 |
|
( / |
) |
2 |
/ Q |
2 |
|
|
|
|
|
|
|||||||
0 |
|
|
|
|
|
0 |
|
|
|
|
|
то есть перемещение ИМ относительно опоры пропорционально внешнему ускорению!
26

В качестве примера рассмотрим случай осциллятора с параметрами m=2,5 мкг, k=10 Н/м, D=1,6 10–7 кг с/м. При указанных значениях собственная частота ω0≈63 крад/с, или f0=ω0/(2π)≈10 кГц,
и Q≈1000.
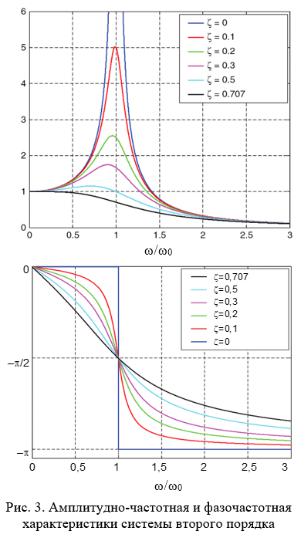
Амплитудная и фазовая частотные характеристики (АЧХ и ФЧХ) передаточной функции (6) при различных значениях коэффициента демпфирования (добротности Q=1/2) приведены на рис. 3. Значение величины амплитуды на низких частотах равно 1/(mω02) или 1/k. При приближении к собственной частоте ω0 величина модуля передаточной функции начинает увеличиваться. На частоте ω0 она увеличивается в Q раз и равна Q/(mω02)=1/(Dω0) или Q/k. На высоких частотах амплитуда спадает с наклоном –40 дБ/дек. Величина
фазового сдвига изменяется от 0 на низких частотах, достигает – 90 на частоте ω0 и далее при стремится к –180 .
Фактически, как видно на рис. 3, а, максимум модуля передаточной функции достигается на частоте, меньшей собственной частоты, и он превышает Q/k. Продифференцировав уравнение (7а) по ω и приравняв производную нулю, получим выражение для резонансной частоты ωр, при которой величина модуля оказывается максимальной:
|
|
|
|
1 |
1 |
|
|
р |
0 |
2Q |
2 |
||||
|
|
|
|||||
|
|
|
|
|
|||
|
|
|
|
|
|
(9)
при условии, что |
Q 1/ |
2 |
или |
1/ |
2 |
стотной передаточной функции равен
. Максимум модуля ча-
Если
|
|
|
|
|
1 |
|
|
|
Q |
2Q |
|
|
|
W |
|
|
|
1 |
|
|
|
|
|
|
|
. |
(10) |
|
0 |
|
2 |
|
2 |
|
2 |
||||||
|
|
|
|
2Q |
|
|
|
m 0 |
4Q |
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||
Q 1/ |
|
2 |
, максимум всегда находится при ω=0 и равен |
||||||||||
1/(mω02). Из уравнений (9) и (10) следует, что при Q→∞ частота, при которой достигается максимум, принимает значение ω0, а сам максимум — значение Q/(mω02).
В практическом случае отношение максимального коэффициента передачи к значению при ω0 очень близко к единице и, следовательно, их различием можно пренебречь. Например, если Q=100, это отношение составляет приблизительно 1,0000125, а если
Q=10, — примерно 1,00125.
27
Согласно рис. 3 и уравнениям (9) и (10), при возбуждении на резонансной частоте даже при достаточно низкой добротности перемещение x достигает при воздействии движущей силы F максимума с очень хорошей точностью. Этому соответствует фазовый сдвиг перемещения по отношению к силе –90. Скорость перемещения v x находится в фазе с силой.
28

Фазовый сдвиг между перемещением и воздействующей силой зависит, согласно (7б), от соотношения между частотами вынужденных и свободных незатухающих 0 колебаний:
tg |
1 |
/ |
0 |
|
|
2 |
/ |
0 |
|
|
. |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
Q 1 ( / |
) |
2 |
|
1 ( / |
) |
2 |
|
|||
|
|
|
|
|
|||||||
|
|
|
0 |
|
|
|
|
0 |
|
|
|
(11)
Собственная частота ω0 структуры может быть увеличена за счет увеличения жесткости подвеса k и уменьшения инерционной массы m, в то время как добротность Q может быть увеличена за счет уменьшения постоянной демпфирования D и увеличения инерционной массы m и жесткости подвеса k.
Согласно (8) механическая чувствительность акселерометра, определяемая по отклику на частоте =0, т. е. при статическом воздействии [см. анализ уравнения (5)], рис. 4:
|
|
|
| x | |
0 |
1 |
S |
ст |
|
|
. |
|
|
|
||||
|
|
a |
2 |
||
|
|
|
|
||
|
|
|
|
|
0 |
(12)
Таким образом, она может быть повышена за счет уменьшения собственной частоты устройства ω0. Уменьшение собственной частоты увеличивает низкочастотный отклик, но не влияет на высокочастотный отклик (рис. 5).
29