

Учебное пособие 800549
.pdfМетод демпфирования (рис. 3) необходим для снижения устранения резонанса двигателя и вибрации.
В диапазоне низких скоростей проблема резонанса естественна и всегда происходит со всеми шаговыми двигателями. В этом исследовании, ∆I используется для удаления всех резонансов, уравнение движения с учётом низко- и скоростной компенсации функции выглядит как:
Jω̇+Dω+T = K I |
K |
sin∆θ+ |
(4) |
|
+ |
(K I cos∆θ− ∑ |
sin(jθ+ϕ )), |
|
|
|
|
|
|
|
где I – усиление микрошага; ∆I – функция компенсации;
ϕ - Сдвиг фазы jth-гармоники.
Рис. 3. Блок-схема управления демпфированием
Петля обратной связи, основанная на опережении по фазе, необходима для преодоления проблемы потери точной позиции и скоростных показателей при рассинхронизации мотора.
Электрическое уравнение в (5) рассматриваются для расчёта регулятора тока, шагового двигателя и конструкции
21

контроля тока обеих фаз двигателя одинаков. На рис. 4 показан токовый контур управления фазы B двигателя. Улучшенный ПИ-регулятор тока предлагается как (6):
di
L dt = υ −R∙i +K ∙ω∙sinθ,
(5)
di
L dt = υ −R∙i −K ∙ω∙sinθ,
где υ ,υ - фазные напряжения; i ,i - фазные токи;
ω - механическая скорость вала ротора; θ - электрическое положение ротора; R – сопротивление;
L – индуктивность;
Ktпостоянный крутящий момент.
Рис. 4. Блок-схема токовой петли управления
PI(s) = K ∙ Kр + |
|
, |
(6) |
|
где s – текущая ошибка;
Kр - пропорциональный коэффициент; K - интегральный коэффициент.
По сравнению с обычным алгоритмом управления ПИ, предложенный улучшенный ПИ-регулятор тока имеет ещё одно
22

усиление, называется усилением компенсации скорости K . В этом исследовании оба коэффициента усиления Kр и K .зависят от параметров двигателя. (R и L), тогда как усиление K определяется рабочей скоростью двигателя. Следовательно, улучшенный ПИ-регулятор тока адаптируется к изменению параметров двигателя и рабочей скорости. Используется метод отмены нуля и сравнение характеристического полинома замкнутого контура текущего управления, цикл показан на рисунке 2 для стандартной системы второго порядка с коэффициентом затухания ξ и собственной частотой ω0 получаем коэффициенты предложенного усовершенствованного ПИ-регулятора как:
K = |
∙ ∙ |
, и K = |
|
, |
(7) |
|
где ξ - коэффициентом затухания.
Область очень низкой скорости: эта область скорости ниже резонансных скоростей. Скорость 4000 pps ([0:500,000 PPS (импульсов в секунду)] (эквивалентно [0: 3000,000 об / мин]) выбрана для тестирования. Без демпфирования фактическая скорость колеблется довольно сильно, как видно на рис. 5 (а). Соответствующая максимальная ошибка скорости, составляет около 1000 pps, как показано на рис. 5 (б). Технология угла наклона, показанная на рис. 6 (в), кажется, не влияет на характеристики скорости двигателя в этом диапазоне. Абсолютная максимальная ошибка скорости, показана на рис. 6 (г), представляет собой такое же значение, как и без демпфирования 1000 pps. Рис. 7 (д-е) показывают производительность с предлагаемым методом демпфирования. Колебания значительно уменьшены, и абсолютная максимальная ошибка скорости уменьшена до 500 pps, как показано на рис.7 (д). В целом, предлагаемый способ демпфирования достигает лучшего быстродействия в этом скоростном диапазоне.
23

Рис. 5. Скорость двигателя и ошибка скорости при 4000 pps. без демпфирования (a; б)
Рис. 6. Скорость двигателя и ошибка скорости при 4000 pps. с технологией наклона угла (в; г)
Рис. 7. Скорость двигателя и ошибка скорости при 4000 pps. с предложенным методом демпфирования (д; е)
24
В этой статье представленный метод контроля улучшает параметры ПИ-регулятора. Создание высокого крутящего момента с избеганием пропусков шагов и синхронизации скорости гарантировано.Предложенный метод контроля вероятнее лучше, чем технология наклона угла, особенно в диапазонах с низкой и очень низкой скоростью.
Все предложенные алгоритмы просты, надёжны и эффективны; они не требуют каких-либо преобразований. Результаты имеют явное потенциальное применение для промышленных задач для повышения надёжности и качества. Однако схема демпфирования требует процедуры идентификации резонансов. Кроме того, этот метод демпфирования ограничен применением различных нагрузок. В будущем, может быть целесообразно обновить систему управления шаговым двигателем, рассматривая методы интерактивной резонансной идентификации для адаптации к различным нагрузкам.
Литература
1.Онищенко Г.Б.,М.И. Аксенов, В.П. Грехов, М.Н. Зарицкий, А.В. Куприков, А.И. Нитиевская Автоматизированный электропривод промышленных установок. – М.: РАСХН – 2001, 520 с.
2.Островлянчик Виктор Юрьевич, Кубарев Василий Анатольевич, Корнеев Виктор Александрович, Галлямова Ольга Радиковна Реализация на основе ПЛИС системы технологической автоматики и защит подъёмной установки с электроприводом переменного тока // Вестник КузГТУ. 2017. №5 (123). URL: https://cyberleninka.ru/article/n/realizatsiya-na-osnove-plis-sistemy- tehnologicheskoy-avtomatiki-i-zaschit-podyomnoy-ustanovki-s- elektroprivodom-peremennogo-toka (дата обращения: 11.03.2020).
3.Ратмиров В. А., и др. Системы с шаговыми двигателями, М. – Л., Издательство «Энергия», 1964, 136 с. с черт.
4.Шаповалов Андрей Анатольевич, Курмашев Арон Даутханович Контурная система согласованного управления промышленным роботом // Доклады ТУСУР. 2012. №1-2 (25). URL: https://cyberleninka.ru/article/n/konturnaya-sistema-
25
soglasovannogo-upravleniya-promyshlennym-robotom (дата обращения: 11.03.2020).
5.Артамонов Д. В., Семенов А. Д., Акчурин Д. Х. Настройка ПИД-регулятора по его временным трендам //Труды международного симпозиума Надежность и качество. – 2005. – Т. 1. – С. 239-241.
6.Бобров Г. С., Герасимова Ю. Е., Юрков Н. К. Шаговые двигатели и их применение //Труды международного симпозиума Надежность и качество. – 2019. – Т. 2. – С. 17-20.
7.Муратов А.В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А.В. Муратов, О.Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2019. – С. 133.
8.Ромащенко М.А., Чирков О.Н., Чураков П.П. Усовершенствованный метод оценки канала с итерационным подавлением помех для многопользовательских систем MIMO-OFDM // Радиотехника. 2019. Т. 83. № 6 (8). С. 150-155.
Воронежский государственный технический университет
26

УДК 681.3
МЕТОДИКА СОЗДАНИЯ БАЗЫ ДАННЫХ ДЛЯ ОПТИМАЛЬНОГО ПОИСКА И ПОДБОРА РАДИОКОМПОНЕНТОВ
Н.В Ципина, А.В. Турецкий, Д.Н Карпухин
Описанная методика позволяет уменьшить время на поиск компонентов, простота ее реализации дает возможность создать универсальную базу данных, которую можно реализовать практически в любой организации, не обладая продвинутым уровнем программирования. Так же использования бесплатного ПО (OpenOffice, LibreOffice и др.) для создания базы данных, делает ее привлекательным вариантом для многих предприятий
Ключевые слова: оптимизация, проектирование, классификатор, база данных, директории.
В настоящее время существует огромное количество различных наименований электронных компонентов и ежедневно их номенклатура растёт. При разработке нового изделия инженер конструктор сталкивается с проблемой быстрого подбора радиокомпонентов. Алгоритм разработки нового проекта приведен ниже (рис. 1) .
Рис. 1. Алгоритм проектирования нового изделия
27
Из анализа следует, что существенные затраты времени происходят на этапе ознакомления с рынком. Для того чтобы найти, нужный компонент, поиск должен осуществляться в регулярно обновляемых прайс-листах или же компании поставщики должны предоставлять доступ к своему складу через интернет при помощи формата XML и выдавать результаты поиска позиций по запросу [1].
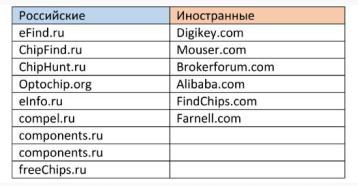
На сегодняшний день существует около десятка подобных платформ, которые безуспешно пытались и пытаются до сих пор решить весьма сложную задачу – дать продавцам и покупателям возможность находить друг друга при помощи единой системы с удобным интерфейсом. Необходимо учитывать комплексный подход для подбора компонентов в процессе проектирования РЭС [2,3,4]. Подобные платформы можно разделить на отечественные (efind, chipfind, optofind и др.) и зарубеж-
ные (digikey, mouser и др.) (рис. 2).
Рис. 2. Список платформ для поиска радиокомпонентов
У рассмотренных платформ есть общие недостатки – отсутствие универсальной платформы для поиска отечественных и зарубежных радиоэлементов, отсутствие работы офлайн, что делает поиск более трудоемким, особенно для тех предприятий, на которых нет постоянного доступа к интернету. Для снижения потерь времени, будет полезна разработка методики, которая поможет снизить трудоемкость на этапе подбора радиокомпонентов [5].
28
Решения поставленную задачу можно следующими способами:
1.Использование готовой базы радиокомпонентов. Для этого следует сделать запрос предприятию производителю на предоставление их элементной базы. Плюсом данного способа является быстрое решение поставленной задачи. Минусами являются большие интеллектуальные затраты в организации мероприятия, привязка к одной фирме, что ограничивает возможность использование более подходящих вариантов других производителей и не гарантируется положительное решение по запросу.
2.Разработка собственной базы радиокомпонентов, которая будет способна удовлетворить все запросы инженеров разработчиков.
Предложенный метод, заключается в том, чтобы инженер разработчик обладал полным списком необходимой информации об используемых компонентах, мог осуществлять поиск и выбор необходимого радиоэлемента для разработки электрической схемы, так же имел доступ к библиотекам с моделями и корпусами радиокомпонентов. При использовании этого метода, реализацией будет создание таблицы Excel, которая представляет собой многоуровневый классификатор, предназначенный для более быстрого поиска компонентов, так же в нем будет реализована возможность, открытия через ссылку документации на тот или иной компонент и перехода по ссылкам в библиотеки Altium, P-CAD и другие САПР. Этот метод так же дает возможность, предприятиям у которых нет свободного доступа в интернет на личном рабочем месте, не вставая с этого места, получить доступ к компонентам и тем самым сэкономить затрачиваемое время. На рис. 3 представлен алгоритм предлагаемой концепции.
29

Рис. 3. Алгоритм создания базы данных
Блок 1. Разделение элементов, которые будут содержаться в базе данных на разделы, группы и подгруппы, для того, чтобы получилась многоуровневая классификация.
Блок 2. Создание классификатора (таблица Excel) осуществляющего упрощенный поиск и переходы по гиперссылкам по классификатору.
Блок 3. Создание каталога базы данных содержащего директории.
Блок 4. Разделение директорий на более низкие уровни (Класс, группа, подгруппа).
Блок 5. Создание нижнего уровня раздела в классифика-
торе.
Для каждого нижнего уровня в классификаторе, должен быть организован отдельный лист в виде таблицы Excel. На нем должны быть размещены записи компонентов. Каждая запись содержит: название производителя, наименование компонента, ссылку на документацию (ТУ, datasheet и т.п), ссылку на библиотеки САПР (Altium, P-CAD и т.д), параметры компонентов (ток, напряжение, рассеиваемая мощность, интерфейсы и т.п) по которым осуществляется подбор подходящего. Параметры компонентов следует выбирать характерные для заданной группы. Так же запись может содержать элементы необходимые для выполнения задач организации (наименование изделия, где приме-
30