

Учебное пособие 800549
.pdfдующих основных операций, выполняемых в определенной последовательности:
1)комплектование;
2)проверка основных цепей;
3)проверка видеоусилителя;
4)проверка синхронизации;
5)настройка кадровой развертки;
6)комплексная настройка развертки;
7)проверка УНЧ;
8)настройка УПЧ канала звукового сопровождения;
9)настройка частотного детектора;
10)настройка УПЧ канала изображения;
11)проверка чувствительности;
12)проверка сквозных характеристик;
13)установка шасси в футляр;
14)испытание телевизора в рабочем состоянии.
Обычно устанавливают коэффициент амплитудной модуляции несущей изображения, который равен 85%. Пределы расхождения частоты несущей звуковое сопровождение блока колеблется от 25 до 50 кГц, а при меньших масштабах расхождения – дополнительной регулировкой. Чтобы контролировать вышеуказанные величины, при необходимости, применяется демодулятор.
Измерения параметров телевизора проводят при нормированном сигнале. Нормированный сигнал первоначально устанавливают при формировании нормированного изображения. Чтобы в дальнейшем произвести измерения, по осциллографу отмечают уровни черного и белого нормированного сигнала. В технических условиях на телевизор определенного типа указывают удобную точку, относительно которой измеряются уровни.
На электроде кинескопа, на котором определяется нормированный сигнал (т.е. на который поступает сигнал зеленого основного цвета), также измеряется сигнал в канале изображения.
Литература
1. Муратов А.В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных тру-
11
дов / А.В. Муратов, О.Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2019. – С. 133.
2. Ремонт телевизоров [Электронный ресурс] / Режим доступа: http://tel-spb.ru/tau.html
3.С.С. Сорокин, А.В. Бондарев, Е.А. Рогозин, Л.Н. Никитин Антенна для «полевого дня» // Проблемы обеспечения надеж-ности и качества приборов, устройств и систем. – Воро-
неж: 2018. – С. 86.
4.Zihao Chen, Yue Ping Zhang, «FR4 PCB Grid Array An- ten-na for Millimeter-Wave 5G Mobile Communications»//IMWSBIO — Singapore, 2013. – pp. 3.
5.Sensen Li, Taiyun Chi, Yanjie Wang, Hua Wang. “A Milli- meter-Wave Dual-Feed Square Loop Antenna for 5G Communications”//IEEE. - Singapore, 2017. – pp. 12.
6.Рязанцев С.А. Регенератор цифровой информации /С.А. Рязанцев, Л. Н. Никитин // Проблемы обеспечения надёжности и качества приборов, устройств и систем: межвузовский сборник научных трудов / ВГТУ. – Воронеж, 2017. – С. 27 – 30.
7.Неганов В.А. Проектирование, конструктивная реализация, примеры применения устройств СВЧ / Неганов В.А.,
Клюев Д.С., Табаков Д.П. – М.:URSS, 2007. – 608 с.
8.Никитин Л.Н. Испытания, контроль и диагностика радиоэлектронной аппаратуры / Л.Н. Никитин. – Воронеж: ФГБОУ ВПО "Воронежский государственный технический уни-
верситет", 2009. –252 с.
9.Свиридова И.В., Чирков О.Н., Бобылкин И.С. Опти-
мизация оценки многолучевого канала радиосвязи с OFDM // Труды международного симпозиума Надежность и ка-
чество. 2018. Т. 2. С. 131-133.
Воронежский государственный технический университет
12
УДК 621.9
ТЕРМОРЕГУЛЯТОР
Л.Н. Никитин, А.А. Затонский
В настоящее время известно множество различных систем, требующих автоматического управления и регулирования различных параметров: температуры, освещенности и т.д.
Ключевые слова: терморегулятор, матричная клавиатура, датчик температуры.
Для регулирования температуры созданы устройства регулирования температуры (терморегуляторы). Однако, они не лишены недостатков:
-терморегуляторы имеют конструктивное исполнение, при котором устройство управления и разъемы для подключения нагрузки находятся в одном корпусе;
-кнопочное управление терморегулятора осуществляется с использованием нескольких кнопок, что создает большие неудобства при эксплуатации и, следовательно, усложняет его программирования;
-часто требуется такое конструктивное исполнение, при котором силовая часть и цифровая выполнены отдельно, с дистанционным управлением.
Решением этой проблемы посвящена эта статья.
За аналог нами было взято устройство, описанное в [1].В процессе анализа данного устройства оно было модернизировано.
В результате была предложена следующая конструкция изделия:
-цифровая часть выполнена в виде пульта, на котором расположены элементы индикации (в виде LCD экрана);
-устройство ввода информации, создано в виде матричной клавиатуры;
-датчик температуры расположен непосредственно в цифровом блоке;
13

-силовая часть выполнена в виде отдельной платы, которая встраивается в корпус блока розеток;
-дистанционное управление осуществляется при помощи приемо-передающих модулей, посредством радиоканала, на частоте 2,4 ГГц.
Схема электрическая принципиальная пульта в целом приведена на рис. 1. Схема электрическая принципиальная платы цифровой части приведена на рис. 2.
Рис. 1. Схема электрическая принципиальная пульта
14
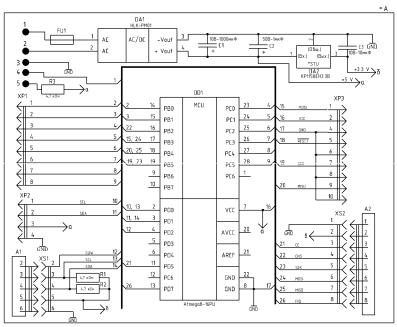
Рис. 2. Схема электрическая принципиальная платы цифровой части
Для устранения распространённой проблемы нехватки ног микроконтроллера был использован модульный расширитель I2C, который используется в комплекте с
LCDэкраном (модуль А1 пульта), и позволяет сократить число используемых ног с 16 до 4, а для самого микроконтроллера до 2. При этом сам модуль соединяется с разъемом XP2 платы, посредством гибкого кабеля (шлейфа).
Вкачестве наиболее удобного ввода выбрана мембранная матричная клавиатура 4х4 (модуль А3 пульта), которая позволяет осуществлять управление и программирование микроконтроллера.
Матричная клавиатура содержит в себе шлейф, что позволяет достаточно легко осуществлять ее соединение с разъемом ХP1 платы.
Вкачестве датчика температуры используется выводной датчик DS18B20 или ему подобный, в корпусе из нержавеющей
15
стали, что позволяет ему измерять температуру не только воздуха, но и жидкостей. Кроме того, датчик можно установить в самой плате [2].
Питание пульта осуществляется от сети 220 В. Для подключения используется стандартный шнур с вилкой (ХP1). Для питания платы используется источник питания DA1, который преобразует переменное напряжение 220В в постоянное напряжение 5 В.
Источник питания, как правило, должен обладать небольшими габаритами, малой массой, высоким КПД, и малой ценой. В связи с этим был выбран источник питания HLK-PM01 фирмы Hi-Link, как наиболее подходящий.
Кроме того, в схеме присутствует стабилизатор напряжения DA2, который преобразует постоянное напряжение значением 5В в постоянное напряжение значением 3,3В, и используется для питания модулей А1 и А2.
Модуль A1это часы реального времени DS3231, а модульA2 – это приемо-передающий модуль NRF24L01.
Конденсаторы С1…С3 служат для фильтрации от высокочастотных и низкочастотных помех и расположены на выходе источника питания и стабилизатора напряжения.
Разъемы ХS1, ХS2 служат для подключения к ним модулей А1, A2соответственно. Разъем Х6 – это ISPразъем, который предназначен для программирования и перепрограммирования микроконтроллера DA1. Он располагается на одной шине с при- емо-передающем модулем А2.
В случае отсутствия электроэнергии в сети для продолжения функциональной работоспособности устройства, будет использован внутренний источник питания, который присутствует в модуле часов реального времени в виде батарейки. При этом, сохраняются не только дата и время, но и заданные в микроконтроллере DD1 установки.
От момента отключения электроэнергии в сети до момента переключения на встроенный источник питания проходит определенный промежуток времени, за который микроконтроллер может сброситься. Конденсатор С1 выполняет роль накопителя емкости, и за период его разрядки микроконтроллер успевает переключиться на внутреннее питание.
16
В качестве микроконтроллера был выбран контроллер ATMEGA8-16PU фирмы Atmel. Он обладает достаточными характеристиками для поставленной задачи.
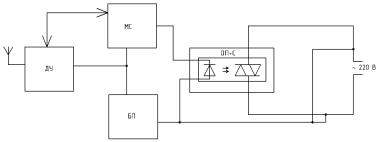
Параметры, по которым осуществляется управление нагрузкой, можно задать в микроконтроллер с мембранной клавиатуры в виде конкретного значения температуры или в заданного времени включения. В момент, когда температура окружающей среды достигнет этого значения, микроконтроллер подает сигнал на приемо-передающий модуль. Он, в свою очередь, передает информацию на другой приемо-передающий модуль ДУ, расположенный в силовой части (рис. 3)
Рис. 3. Схема силовой части
Модуль ДУ, получив сигнал передает его в микроконтроллер МС. Контроллер, обработав сигнал, подает сигнал на одно оптореле (с симистором) в зависимости от выбранного канала. Оптимальным числом каналов было выбрано 6.Оптореле, получив сигнал, открывается и подает напряжение на контакты розетки, к которым подключена нагрузка.
Разработанный терморегулятор с резервным питанием и дистанционным управлением нагрузкой может управлять нагрузкой подключаемой мощностью до 2,5 кВт на расстоянии до 50 метров и обладает наиболее удобным исполнением.
17
Литература
1.Г. Нюхтилин. Шестиканальный таймер с функциями регулирования температуры, освещения и резервным питанием. Журнал «Радио» 2017 №1. - С. 32-37.
2.Муратов А.В. Проблемы обеспечения надежности и качества приборов, устройств и систем: сборник научных трудов / А.В. Муратов, О.Ю. Макаров. – Воронеж, Воронежский государственный технический университет. – 2019. – С. 133.
3.Чирков О.Н., Астрединов Р.К. Многополосный преобразователь частоты OFDM // Проблемы обеспечения надежности и качества приборов, устройств и систем. Межвузовский сборник научных трудов. Воронеж, 2018. С. 120-124.
Воронежский государственный технический университет
18

УДК 621.9
МЕТОДИКА ПРОЕКТИРОВАНИЯ УСТРОЙСТВ УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ПОВЫШЕНИЯ НАДЁЖНОСТИ И СТАБИЛЬНОСТИ ГИБРИДНЫХ ШАГОВЫХ ДВИГАТЕЛЕЙ.
Д.О. Кайгородов
В данной статье пойдёт речь об эффективном контроле с обратной связью для шагового двигателя. Предлагаемый подход состоит в управлении током в замкнутом контуре, контроле положения в замкнутом контуре и контроле демпфирования.
Шаговые двигатели обычно могут работать в режиме разомкнутого контура или режиме с обратной связью, и это было тщательно изучено. В режиме разомкнутого контура, управляет токами в катушках двигателя драйвер управления шагового двигателя. Различные эффективные схемы управления, такие как обычное управление ПИ–регуляторами [1], интеллектуальное управление [2] и нечёткое управление [3], были исследованы для управления током в замкнутом контуре. Однако в этих схемах коэффициенты регулятора тока определяются только на основании параметров двигателя или сложных расчётов. В этой работе предлагается продвинутый ПИ-регулятор тока, коэффициенты которого рассчитаны на основе параметров двигателя и рабочей скорости.
Ключевые слова: шаговый двигатель, ПИ-регулятор, пропуски шагов, контроль положения, демпфирование.
Блок-схема общей системы управления шаговым двигателем показана на рис. 1
Рис. 1. Структурная схема предлагаемой системы управления шаговым двигателем
Двухфазный биполярный гибридный шаговый двигатель рассматривается в этом исследовании с электрическими уравнениями, приведёнными в [4].
19

Метод контроля положения позволяет получить высокий крутящий момент и восстанавливает скорость, при потере синхронизации.
Закон управления показан на рис. 2. Регулятор положения работает в режиме разомкнутого или замкнутого цикла, в зависимости от значения сравнения между ошибкой позиции,
∆θ и пороговым значением θ приведены в (1). |
|
θ = K ∙ω+ . |
(1) |
В режиме разомкнутого контура угол фазового возбуждения θ аналогичен в исходном положении θ . Тем не менее, в режиме с обратной связью, два ПИ-регулятора используется для регулировки угла фазы возбуждения. Эти два контроллера описаны в [5] и [6] и используются для устранения ошибки положения и ошибки скорости соответственно.
PI |
(s) = K |
+ |
|
|
, |
|
(2) |
|
|
||||||
PI |
(s) = K |
+ |
|
|
, |
(3) |
|
|
|
||||||
Рис. 2. Алгоритм управления положением
20