

Учебное пособие 800222
.pdfсистемы ФАП фазы полезных напряжений на выходах УПЧ этих каналов поддерживаются равными и отличаются от фазы опорного напряжения на 90 .
Рис. 5.12
Сложение сигналов всех каналов проводится в сумматоре ( ). Напряжение первого канала при этом предварительно сдвигается по фазе 90 . В качестве опорного напряжения, подаваемого на фазовые дискриминаторы отдельных каналов, может использоваться также суммарное напряжение всех каналов.
5.3. Системы слежения за временным положением импульсного сигнала
Системы слежения за временным положением импульсов применяются для выделения импульсного периодического сигнала на фоне помех в приемниках
радиотехнических |
истем |
передачи |
информации, |
|
99 |
|
|
радиолокационных приемниках и других устройствах.
Такие системы называют временными автоселекторами. На рис. 2.13 показана часть упрощенной функциональной схемы радиолокационного приемника импульсных некогерентных сигналов с временным автоселектором (автоселектор выделен пунктиром).
Рис.5.13
Приемник содержит ряд типовых элементов: смеситель (СМ), гетеродин (Г), усилитель промежуточной частоты (УПЧ) амплитудный детектор (АД), видеоусилитель (ВУ). Напряжение с выхода видеоусилителя снимается для последующей обработки, например для выделения информации об угловом положении цели.
Для уменьшения действия помех приемное устройство периодически открывается (стробируется) лишь на короткие интервалы времени действия стробирующих импульсов. Они формируются генератором импульсов (ГИ), входящим в состав временного автоселектора.
При стробировании возникают нежелательные переходные процессы, длительность которых обратно пропорциональна полосе пропускания элементов приемника, в которых проводится стробирование. Поэтому оно выполняется обычно в широкополосных элементах приемника: входных цепях или, как показано на рис. 5.13, в УПЧ.
100
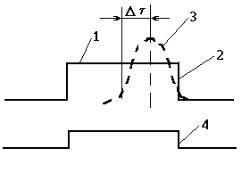
Автоселектор обеспечивает такое совмещение во времени импульсов сигнала и стробирующих импульсов. Для этого, кроме стробирующего импульса, открывающего приемник, генератор импульсов формирует еще два следящих импульса. Обычно это следующие друг за другом прямоугольные импульсы. В этом случае их общий фронт проходит через середину стробирующего импульса (рис. 5.14, на котором цифрами 1 и 2 обозначены первый и второй следящие импульсы, цифрами 3 и 4 - импульс сигнала и импульс, стробирующий УПЧ).
Следящие импульсы подаются на временной дискриминатор (ВД) вместе с импульсоми сигнала с выхода видеоусилителя. На выходе ВД формируется напряжение, зависящее от рассогласования между временным положением импульса сигнала и следящих импульсов (рис. 5.14). Так как стробирующий и следящие импульсы жестко связаны между собой, величина равна также сдвигу между импульсом сигнала и стробирующим импульсом.
Рис. 5.14
Выходное напряжение ВД сглаживается ФНЧ и поступает в качестве управляющего на устройство регулируемой задержки (УРЗ). В э том устройстве опорный
101
импульс Uоп, поступающий от передатчика радиолокационной станции, задерживается на некоторой временной интервал и запускает генератор импульсов, задавая тем самым положение стробирующих и следящих импульсов. Управляющее напряжение, снимаемое с выхода ФНЧ, изменяет величину задержки так, что временной сдвиг между сигнальными и следящими импульсами уменьшается. При изменении временного положения импульсов сигнала, например, из-за изменения дальности до цели, происходит соответствующее
перемещение следящих импульсов, и |
осуществляется |
||
автоматическое сопровождение цели по дальности. |
|||
Рассмотрим |
подробнее |
работу |
временного |
дискриминатора. Один из возможных вариантов ВД показан на рис. 5.15 Принцип его работы поясняется изображенным на рис. 5.16 эпюрами напряжений, номера которых соответствуют контрольным точкам в схеме дискриминатора. В состав ВД входят два каскада совпадения КС1 и КС2. На их входы поступают импульсы сигнала Uс (эпюра 1) и, соответственно, первый и второй следящие импульсы Uсл1, сл2 (эпюры 2, 3). На выход каждого каскада совпадений проходит часть импульса сигнала, совпадающая по времени с соответствующим следящим импульсом (эпюры 5, 6).
Выходные напряжения каскадов совпадений детектируются детекторами Д1 и Д2. Постоянные времени зарядной и разрядной цепей детекторов могут быть выбраны так, чтобы во время действия следящих импульсов происходило интегрирование напряжения, прошедшего через каскады совпадений, а в паузе между следящими импульсами
– его запоминание (эпюры 7 и 8). Перед приходом очередной пары следящих импульсов накопленные напряжения сбрасываются до нуля специальным импульсом ( эпюра 4).
Выходные напряжения детекторов вычитаются и образуют выходное напряжение дискриминатора (эпюра 9).
102
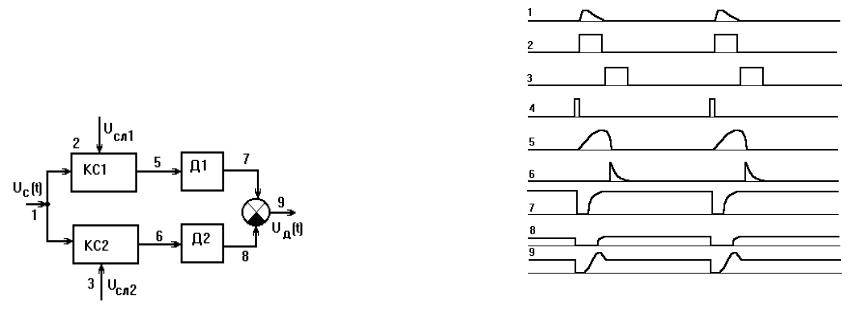
При наличии временного сдвига импульсы сигнала делятся следящими импульсами на две неравные части. При этом выходные напряжения детекторов Д1 и Д2 получаются разными, и на выходе дискриминатора появляется напряжение, зависящее от величины сдвига .
Рис. 5.15
Построим структурную схему временного автоселектора, отображающую процесс слежения за временным положением импульсного сигнала. В связи с импульсным характером сигнала информация о рассогласовании сигнальных и следящих импульсов может быть получена в автоселекторе лишь в дискретные моменты времени, отстоящие на период повторения. Поэтому, строго говоря, временной автоселектор является системой прерывистого регулирования. Обычно частота повторения импульсов много больше полосы пропускания автоселектора, поэтому его можно рассматривать как непрерывную систему регулирования.
С этих позиций преобразования, происходящие в автоселекторе, описываются следующими соотношениями.
103
Рис. 5.16
Временной сдвиг между положением сигнальных с и следящих сл импульсов равен
= с- сл , |
(5.20) |
причем под положением следящих импульсов понимается положение их общего фронта. За начало отсчета величин с, сл примем положение опорного импульса Uоп. При высокой частоте повторения импульсов пульсации выходного напряжения ВД, обусловленные импульсным характером сигнала, эффективно подавляются ФНЧ. В этом случае при анализе автоселектора достаточно рассматривать выходное напряжение дискриминатора, усредненное за период повторения импульсов. Оно записывается в виде
Uд(t)=M[Uд(t)]+ (t, )= F( ) + (t, ), |
(5.21) |
104 |
|
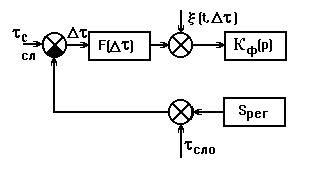
где M[Uд(t)]= F( ) - математическое ожидание и (t, ) - флюктуационная составляющая выходного напряжения ВД, усредненного за период повторения импульсов.
Форма дискриминационной характеристики F( ) и параметры напряжения (t, ) зависят от соотношения сигнал/шум в полосе УПЧ, ширины полосы пропускания УПЧ, длительности следящих импульсов, наличия амплитудных флюктуаций сигнала.
В состав фильтра в автоселекторе обычно включают один или два интегратора. Преобразование выходного напряжения дискриминатора определяется операторным коэффициентом передачи ФНЧ Kф(р). Напряжение Uф(t) на выходе фильтра при этом равно
Uф(t)=Kф(p)Uд(t), p=d/dt. |
(5.22) |
Обычно зависимость величины задержки в устройстве регулируемой задержки от управляющего напряжения является безынерционной. Если она, кроме того, линейна, то выполняется соотношение
сл = сл 0 + SрегUф, |
(5.23) |
где Sрег - крутизна регулировочной характеристики, сл 0 - значение задержки при отсутствии управляющего напряжения.
Величина сл 0 может быть нестабильной, что необходимо учитывать при анализе автоселектора.
Соотношениям (5.20) - (5.23) соответствует структурная схема временного автоселектора, изображенная на рис. 5.17.
Рассматриваемый временной автоселектор позволяет получить на выходе ФНЧ напряжение, пропорциональное расстоянию до объекта, т.е. выполняет одновременно функции дальномера.
105
Рис. 5.17
Покажем это, представив величину с, определяющую положение импульса сигнала, в виде
с = 0 + r, |
(5.24) |
где 0 - временной интервал между опорным импульсом и зондирующим импульсом передатчика;
r=2r/c - время запаздывания отраженного импульса по отношению к зондирующему;
r - расстояние до объекта;
с - скорость распространения электромагнитных волн. Если в режиме слежения импульсы сигнала точно
совмещены со следящими, то с = сл и, как следует из (5.23) и (5.24), справедливы равенства
0 + r= сл 0 + Sрег, , Uф=( r+ 0 - сл 0)/ Sрег..
Выбрав величину 0 равной сл 0, получим Uф=2r/(Sрег0 c). Следовательно, напряжение Uф пропорционально расстоянию до объекта.
Системы слежения за временным положением применяются и при использовании других, более сложных сигналов, например импульсного когерентного, фазоманипулированного и др.
106
5.4. Угломерные следящие системы
Системы автоматического слежения за направлением прихода радиосигнала используются в радиолокации, радионавигации, радиоуправления для измерения угловых координат источника сигнала. Поэтому их называют угломерными следящими системами (УCC). При использовании антенн с узкими диаграммами направленности рассматриваемые системы осуществляют также пространственную фильтрацию полезного сигнала на фоне помех.
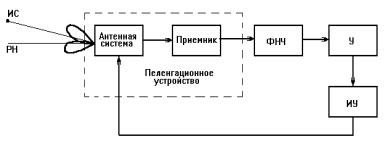
Функциональная схема системы углового сопровождения показана на рисунке 5.18, в еѐ состав входят: пеленгационное устройство (ПУ), ФНЧ, усилитель (У) и исполнительное устройство (ИУ).
Рис. 5.18
Пеленгационное устройство, играющее роль углового дискриминатора, состоит из антенны и приемника, в котором проводится обработка принятого радиосигнала. При отклонении источника сигнала (ИС) от некоторого направления РН, называемого равносигнальным, на выходе ПУ появляется напряжение Uд(t), зависящее от величины и знака этого отклонения. Напряжение Uд(t), далее фильтруется, усиливается и воздействует на исполнительное устройство.
107
Исполнительное устройство изменяет положение антенны или состояние ее отдельных элементов так, что РН смещается в пространстве и исходное угловое рассогласование между ним и направлением на источник сигнала уменьшается.
Угловое положение источника сигнала в пространстве обычно оценивается углами и1 и и2, отсчитываемыми в двух взаимно перпендикулярных плоскостях: горизонтальной (плоскости азимута) и вертикальной (плоскости угла места). В этих же плоскостях измеряется угловое рассогласование между РН и направлением на источник сигнала и осуществляется управление положением антенны.
Составим уравнения, описывающие работу УСС, рассматривая для простоты случай движения в одной плоскости. Обозначим угловые положения источника сигнала и равносигнального направления антенны, измеренные в некоторой опорной системе координат, соответственно черези и а. Тогда угловое рассогласование между ними,
угловым дискриминатором (пеленгатором),
= и- а. |
(5.25) |
Пеленгатор, как правило, является устройством безынерционным по отношению к изменению угла . Напряжение на его выходе, содержащее детерминированную составляющую М[uд(t)]=F( ) и флюктуационную составляющую (t, ), можно записать в виде
uд(t)= F( )+ (t, ). |
(5.26) |
Зависимость F( ) детерминированной составляющей выходного напряжения пеленгатора от рассогласования , являющуюся дискриминационной характеристикой
108
пеленгатора, часто называют также пеленгационной характеристикой.
Преобразование напряжения uд(t) фильтром с операторным коэффициентом передачи Кф(р) описывается
выражением |
|
uф=Kф(p)uд(t). |
(5.27) |
В случае необходимости к фильтру может быть отнесено звено, учитывающее инерционные свойства пеленгатора.
Исполнительное устройство, изменяющее положение РН УСС, может быть электромеханическим, гироскопическим или электронным. Если смещение РН достигается изменением положения зеркала антенны, то в качестве ИУ часто используется электродвигатель. При электрическом управлении диаграммой направленности антенны, например, фазированной антенной решетки, применяются электронные фазовращатели.
При установке антенны на подвижном объекте исполнительное устройство иногда делают гироскопическим с тем, чтобы при отсутствии управляющего напряжения обеспечить постоянство положения диаграммы направленности антенны в пространстве независимо от изменения положения объекта.
Элементы ИУ могут иметь в общем случае нелинейные характеристики, связанные с наличием зоны нечувствительности, люфтом, ограничением, нелинейностью регулировочных характеристик. Без учета указанных нелинейностей, которые обычно стремятся сделать малыми, ИУ можно считать линейным и описать уравнением
а(t)=Kиу(p)uф(t), |
(5.28) |
где Kиу(p) - операторный коэффициент передачи.
109
При использовании электродвигателя коэффициент Kиу(p) часто записывается в виде Kиу(p)=k/p(l+pTдв), где k - крутизна зависимости угловой скорости вращения антенны в установившемся режиме от величины управляющего напряжения uф(t), постоянная времени Тдв учитывает инерционные свойства двигателя.
Структурная схема системы УСС, соответствующая уравнениям (5.25) - (5.28), показана на рис. 5.19
Рис. 5.19
5.5. Обобщенные функциональные и структурные схемы радиотехнических следящих систем
Радиотехнические следящие системы имеют много общего, поскольку осуществляют слежение за тем или иным параметром радиосигнала.
Аналогия процессов регулирования, протекающих в радиотехнических следящих системах, позволяет составить их обобщенные функциональную и структурную схемы.
Обобщенная функциональная схема радиотехнической следящей системы показана на рис. 5.20.
В схеме приняты обозначения: Дис - дискриминатор; ГОС - генератор опорных сигналов; Ф фильтр.
110
uвх( , ) |
|
uд(t) |
|
|
Дис |
Ф |
|
||
|
|
|
||
|
|
|
|
|
|
uоп(t,у) |
uф(t) |
||
|
|
|
|
|
|
ГОС |
|
|
|
|
|
|
|
|
Рис. 5.20
На одном из входов дискриминатора действует процесс uвх(t)=uc (t, )+ uш(t),
где uc(t, ) полезный сигнал, за параметром (t) которого ведѐтся слежение; uш(t) шум.
На второй вход дискриминатора поступает опорный сигнал uоп(t,у), зависящий от оценки у(t) отслеживаемого параметра (t), сформированной в процессе слежения. Вид опорного сигнала определяется типом следящей системы. Во временном автоселекторе опорным сигналом является последовательность стробирующих импульсов, в системе ФАП напряжение подстраиваемого генератора.
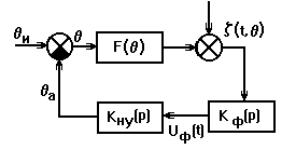
В дискриминаторе входной сигнал uвх(t) подвергается нелинейному преобразованию, в результате которого формируется напряжение, зависящее от ошибки слежения x= у. Зависимость F(x) математического ожидания выходного напряжения от ошибки слежения x называют дискриминационной характеристикой (ДХ). Выходное напряжение дискриминатора uд(t) содержит флюктуационную составляющую (t,x), зависящую от ошибки слежения х. Напряжение uд(t), снимаемое с выхода дискриминатора (рис. 5.20), проходит через фильтр и воздействует на ГОС, изменяя соответствующий параметр (фазу, частоту, временное положение) опорного сигнала.
111
Обобщѐнная структурная схема радиотехнической следящей системы, отображающая процесс автоматического слежения за параметром сигнала показана на рис.5.21.
Рис.5.21
В схеме приняты следующие обозначения:
МЭД - математический эквивалент дискриминатора;
(t) задающее воздействие (отслеживаемый параметр сигнала);
у(t) управляемая величина (частота ПГ, положение следящих импульсов), являющаяся оценкой отслеживаемого параметра;
х ошибка слежения.
МЭД отображает формирование выходного напряжение дискриминатора, зависящего от ошибки слежения.
МЭД состоит из устройства сравнения (t) и у(t), безынерционного нелинейного звена F(x) и сумматора, на вход которого подаѐтся флюктуационное напряжение (t,x).
Звено с ОКП К(р) описывает преобразование выходного напряжения Uд(t) дискриминатора (рис. 2.21), происходящее в фильтре и генераторе опорных сигналов.
ОКП К(р) зависит от ОКП фильтра Кф(р), типа и параметров управляемого генератора опорных сигналов. В системе ЧАП К(р)= Кф(р) Sр,.
В системе ФАП: К(р)= Кф(р) Sр/р,
где 1/р - оператор интегрирования, учитывает переход от частоты ПГ к его фазе.
112
5.6. Системы автоматической регулировки усиления
Система АРУ широко применяется, например, в РПУ и
предназначена для |
стабилизации уровня сигнала на выходе |
|||
усилителя при изменениях уровня входного сигнала . |
||||
В |
радиотехнических |
следящих системах изменение |
||
уровня |
сигнала на |
входе |
дискриминатора |
приводит к |
изменению его крутизны и коэффициента передачи контура
регулирования. При |
этом |
параметры |
и характеристики |
следящих систем |
могут |
изменяться |
весьма существенно, |
вплоть до срыва режима слежения. Задача системы АРУ - ограничить пределы изменения уровня сигнала на выходе усилителя и при этом сохранить и по возможности мало исказить полезную модуляцию сигнала.
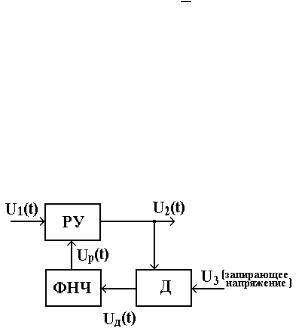
В известных вариантах построения систем АРУ, используются принципы управления по рассогласованию или по воздействию, что приводит к построению системы АРУ ―назад― или ―вперед‖ соответственно. На рис. 5.22 показана схема системы АРУ ―назад‖, в которой реализуется принцип управления по рассогласованию.
Рис. 5.22
В схеме приняты обозначения: РУ - усилитель с регулируемым коэффициентом усиления; ФНЧ - фильтр нижних частот; Д - детектор.
113
Система работает следующим образом. Входное напряжение u1(t) поступает на усилитель (РУ). Выходное напряжение u2(t) усилителя подвергается амплитудному детектированию в детекторе Д. Напряжение uд (t) с выхода детектора проходит через ФНЧ и поступает в виде регулирующего напряжения uр(t) на усилитель, изменяя его коэффициент усиления kу .
Стабилизация уровня выходного напряжения усилителя достигается тем, что величина kу при увеличении уровня входного сигнала уменьшается, а при уменьшении входного сигнала повышается.
Постоянная времени ФНЧ выбирается так, чтобы не пропустить быстроменяющуюся составляющую напряжения с выхода детектора, вызванную, например, полезной амплитудной модуляцией сигнала, и тем самым исключить ее подавление системой АРУ. Уменьшение постоянной времени ФНЧ при запаздывании сигнала в РУ может также ограничиваться потерей устойчивости процесса регулирования.
Изменение коэффициента усиления достигается разными способами: изменением крутизны усилительных приборов; изменением коэффициента передачи управляемого аттенюатора; шунтированием нагрузки и др.[5].
Для предотвращения снижения коэффициента усиления слабых входных сигналов и повышения стабилизируемого уровня выходного напряжения усилителя, обычно применяют систему АРУ с задержкой.
Задержка в работе АРУ создается путем подачи на детектор запирающего его напряжения Uз (рис. 5.22).
В результате регулирующее напряжение up на входе детектора появляется только после того, как амплитуда U2 выходного напряжения усилителя превысит напряжение задержки Uз.
114
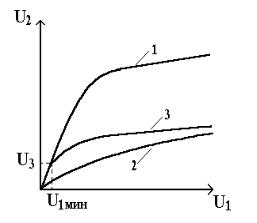
На рис. 5.23 показаны амплитудные характеристики усилителя: без АРУ (кривая 1); с АРУ без задержки (кривая 2); с АРУ, имеющей задержку (кривая 3).
|
|
|
|
Рис. 5.23 |
|
|
|
||
Как |
видно |
из |
рис. |
5.23, |
|
применение задержки |
|||
позволяет |
|
повысить уровень, на котором стабилизируется |
|||||||
амплитуда |
|
выходного напряжения усилителя. |
|
||||||
При |
|
анализе систем АРУ часто необходимо установить |
|||||||
их устойчивость, |
качество |
стабилизации |
выходного |
||||||
напряжения |
в |
стационарном |
режиме, |
длительность |
|||||
переходных |
процессов, условия отсутствия заметных |
||||||||
искажений полезной амплитудной |
модуляции сигнала. |
||||||||
Для |
|
ответа |
на |
эти |
вопросы |
необходимо найти |
|||
уравнения, |
описывающие |
поведение отдельных элементов и |
|||||||
всей замкнутой системы регулирования. Основным инерционным элементом системы АРУ, является ФНЧ, остальные элементы будем считать безынерционными.
При |
исследовании |
устойчивости |
процесса |
регулирования |
может быть необходим также учет инерцион- |
||
|
115 |
|
|
ности регулируемого усилителя.
Регулировочной характеристикой (РХ) называют зависимость коэффициента усиления kу от величины регулирующего напряжения uр. РХ в общем случае нелинейна; ее часто аппроксимируют линейной зависимостью вида:
ky=k0-Spyup, |
(5.29) |
где k0 - значение коэффициента усиления при нулевом регулирующем напряжении, Spy - крутизна.
При отсутствии ограничителя в усилителе амплитуда U2(t) выходного напряжения связана с амплитудой U1(t) входного сигнала соотношением:
U2(t)=kyU1(t). |
(5.30) |
При линейном детектировании выходное напряжение |
|
детектора uд определяется выражением: |
|
uд={kд(U2-U3),приU2 U3; |
|
0,приU2<U3, |
(5.31) |
где kд - коэффициент передачи детектора, U3 - напряжение задержки.
ФНЧ является линейным устройством и описывается ОКП Кф(p). При этом выходное напряжение фильтра, являющееся регулирующим напряжением в схеме АРУ, описывается дифференциальным уравнением:
up(t)=Kф(p)uд(t), |
(5.32) |
Структурная схема системы |
АРУ, построенная в |
соответствии с (5.29) - (5.32), показана на рис. 5.24. 116
На схеме обозначено: kд (U2 - U3) = x, f(x) -нелинейная зависимость вида: f(x) = x, при x 0;
0, при x<0.
Таким образом, система АРУ является замкнутой системой управления.
Задающим воздействием в ней является постоянное во времени напряжение задержки Uз. Следовательно, данная система управления является системой стабилизации, в отличие от некоторых следящих систем.
Важной особенностью системы АРУ является переменность параметров во времени, вызванная наличием в контуре управления звена с коэффициентом передачи k(t) = U1(t).
Рис. 5.24
Из рис. 5.24 следует также , что система АРУ содержит нелинейное звено и является поэтому нелинейной системой с переменными параметрами .
При оценке качества стабилизации уровня выходного напряжения в стационарном режиме амплитуду входного сигнала U1, принимают постоянной.
Система АРУ, оставаясь нелинейной, является при этом системой с постоянными параметрами и анализ еѐ существенно упрощается.
117
Пользуясь уравнениями (5.29)- (5.32) и учитывая, что функция f(x) является кусочно-линейной, можно рассчитать амплитудную характеристику усилителя с АРУ, показанную на рис. 5.23:
U2=k0U1, при U2 < U3,
U2=([k0+Spy kд Kф(0)U3] / [1+ Spy kд Kф(0)U1])U1 ,
при U2 U3 ,
где Кф(0) - коэффициент передачи постоянного напряжения ФНЧ , k0- значение коэффициента усиления при нулевом регулирующем напряжении, S py - крутизна регулировочной характеристики.
Если при работе системы АРУ все время выполняется условие U2 - U3 > 0 , то нелинейный элемент f(x) в структурной схеме можно заменить на линейный с коэффициентом передачи, равным единице.
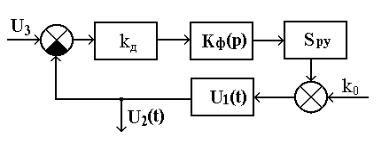
Система АРУ становится при этом линейной системой регулирования с переменными в общем случае параметрами, и ее структурная схема принимает вид, показанный на рис. 5.25
Рис. 5.25
Анализируя устойчивость системы АРУ, амплитуду входного сигнала обычно полагают постоянной. Система АРУ оказывается при U2 > U3 линейной с постоянными параметрами. При анализе переходных процессов вызванных подачей на вход усилителя сигнала с постоянной амплитудой,
118