

Основы автоматики и системы автоматического управления. Антиликаторов А.Б., Бокова О.И
.pdfА.Б. Антиликаторов О.И. Бокова В.И. Кравченко Н. Э. Самойленко Н.С. Хохлов
ОСНОВЫ АВТОМАТИКИ И СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебное пособие
Воронеж 2004
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический
университет
А.Б. Антиликаторов О.И. Бокова В.И. Кравченко Н.Э. Самойленко Н.С. Хохлов
ОСНОВЫ АВТОМАТИКИ И СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Рекомендовано учебно-методическим объединением вузов Российской Федерации по образованию в области радиотехники, электроники, биомедицинской техники и автоматизации в качестве учебного пособия для студентов высших учебных заведений, обучающихся по специальности 210201 «Проектирование и технология радиоэлектронных средств» направления 210200 «Проектирование и технология электронных средств»
Воронеж 2004
УДК 681.3
Основы автоматики и системы автоматического управления : Учеб. пособие А. Б. Антиликаторов, О. И. Бокова, В. И.
Кравченко, Н. Э. Самойленко, Н. С. Хохлов/ Воронеж: Воронеж. гос.
техн. ун-т, 2004. 124 с. |
|
|
|
|
|
В учебном |
пособии |
рассматриваются |
вопросы |
теории |
|
разработки эффективных |
систем автоматического управления |
||||
(САУ). |
|
|
|
|
|
Издание |
соответствует |
требованиям |
Государственного |
||
образовательного |
стандарта |
высшего |
профессионального |
||
образования по направлению 210200 "Проектирование и технология электронных средств", специальности 210201 "Проектирование и технология радиоэлектронных средств", дисциплине ―Основы автоматики и САУ‖.
Учебное пособие предназначено для студентов технических вузов, аспирантов и специалистов в области автоматического управления.
Издание подготовлено в электронном виде в текстовом редакторе MS Word XP и содержится в файле pos_САУ.doc.
Ил. 85. Библиогр.: 4 назв.
Научный редактор д-р техн. наук. проф. О. Ю. Макаров
Рецензенты: кафедра информационно-технического обеспечения Воронежского института МВД, (д-р. техн. наук, проф. В.И.Сумин ); главный научный сотрудник ФГУП Воронежский НИИ связи д-р физ.-мат. наук, проф. Ю.Б.Нечаев
Печатается по решению редакционно-издательского совета Воронежского государственного технического университета
©Антиликаторов А.Б., Бокова О.И., Кравченко В.И., Самойленко Н.Э., Хохлов Н.С.., 2004
©Оформление. Воронежский государственный технический университет, 2004
ВВЕДЕНИЕ
Современный этап научно-технического прогресса характеризуется увеличением количества технических изделий с одновременным их усложнением, а также необходимостью сокращения сроков и повышения качества проектирования.
Основным средством решения данной проблемы является комплексная автоматизация проектирования и производства, при которой в рамках системного подхода определяющим фактором повышения эффективности процесса функционирования производственной системы является наличие мобильной и оптимальной по структуре системы управления реального времени, адекватно отображающей протекающие в системе процессы. Создание и эксплуатация систем автоматизации в современных условиях перестали быть функциями лишь узкого круга специалистов по автоматизированному и автоматическому управлению. Такие системы требуют участия практически всех групп инженернотехнического персонала. Следовательно, даже инженер, непосредственно не связанный по роду своей деятельности с автоматизацией управления, должен обладать достаточно широкими знаниями в этой области.
3
1. ОСНОВНЫЕ ПОНЯТИЯ
1.1. Структура САУ
Автоматика – отрасль науки и техники, охватывающая теорию и принципы построения систем управления техническими процессами.
Технический процесс – это устройство или реализованный технологический процесс. Автоматика изучает системы управления, действующие без непосредственного участия человека.
Принята следующая классификация параметров технического процесса.
1.Входное воздействие.
2.Внешнее воздействие.
3.Внутренние параметры.
4.Выходные параметры (координаты выходного сигнала или управляемые величины).
В системе автоматического управления (САУ) изменение управляемой величины по определенному закону без вмешательства человека выполняет управляющее устройство (УУ). САУ состоит из УУ и объекта управления
(ОУ).
САУ – это такая система, которая обеспечивает комплекс операций по управлению любым техническим, в том числе производственным процессом без участия человека с помощью автоматического управляющего устройства.
Каждый процесс управления в любой момент времени характеризуется одним или несколькими показателями, которые отображают физическое состояние объекта управления (ОУ). Эти показатели в процессе управления должны изменяться по некоторому закону или же оставаться низменными при изменяющихся внешних условиях и режимах работы УУ, их называют параметрами управления процесса.
4
Таким образом, автоматическое управление - это совокупность воздействий, направленных на улучшение функционирования объекта управления. При этом управляющее воздействие выбирается из множества возможных воздействий на основе необходимой информации.
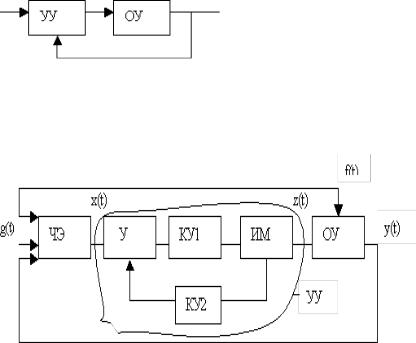
Обобщенная структура САУ изображена на рис. 1.1.
Рис.1.1
Схема функционирования САУ приведена на рис. 1.2.
Рис. 1.2
На рис. 2 приведены следующие обозначения y(t)– выходной сигнал
g(t)–задающее воздействие, поступает на вход УУ и содержит информацию о требуемых значениях выходных параметров y(t)
5
z(t)– управляющее воздействие, поступает от УУ на вход ОУ для обеспечения в нем желаемого процесса
f(t)–возмущающее воздействие (вызывает отклонение управляемого параметра y(t) от заданного значения)
x(t)– это сигнал, поступающий с выхода чувствительного элемента,
x(t)=F(g(t), y(t), f(t)) |
(1.1) |
x(t) – характеризует ошибку САУ.
Для элементов САУ использованы обозначения ЧЭ – чувствительный элемент, У – усилитель, КУ1, КУ2 –
последовательное |
и |
|
параллельное |
корректирующие |
||
устройства, |
ИМ |
|
– |
исполнительный |
механизм. |
|
Функционирование САУ осуществляется следующим образом. Задающее воздействие g(t) является входным сигналом САУ и определяет требуемый закон измененения выходного сигнала. g(t) поступает на чувствительный элемент, кроме того, на ЧЭ подаются сигналы обратной связи y(t) и возмущающего воздействия f(t). ЧЭ вырабатывает сигнал ошибки x(t). Характеризующий ошибку САУ сигнал x(t) усиливается усилителем У и поступает на ИМ, который вырабатывает и подает на ОУ управляющее воздействие. Иногда, кроме сигнала x(t), учитывают его производные и
интегральные характеристики. |
|
|
|
|
Для |
обеспечения |
требуемых |
статических и |
|
динамических |
характеристик |
системы |
используют |
|
корректирующие устройства КУ1последовательное и КУ2параллельное.
Кроме того, в состав САУ могут входить специальные элементы для согласования отдельных частей системы и вычислительное устройство для реализации алгоритма работы УУ.
6
В САУ рассматриваются два типа ошибок, статическая и динамическая.
Статическая ошибка – это установившееся значение разности между заданным и текущим значениями y(t) при постоянных значениях задающего g(t) или возмущающего воздействия f(t).
Динамическая ошибка – это значение разности между заданным и текущим значением управляющих воздействий при произвольных y(t) и f(t). Величины ошибок зависят от структуры УУ.
Система, в которой статическая ошибка не равна нулю, называется статической. Система с нулевой статической ошибкой называется астатической (нестатической).
Параметры САУ могут быть постоянными или переменными. Если параметры САУ постоянные, или изменяются по линейному закону, САУ называется линейной.
1.2. Классификация САУ
Принята следующая классификация существующих САУ. I. По виду используемой УУ информации различают разомкнутые или замкнутые САУ. В разомкнутых системах отсутствует обратная связь. При наличии обратной связи ОУ и УУ образуют замкнутый контур, обеспечивающий
автоматический контроль за состоянием ОУ.
II. По характеру применения задающего воздействия y(t) различают следующие системы.
1. Система автоматической стабилизации g(t) постоянно, то есть необходимо поддерживать постоянным значение управляемого сигнала y(t).
2. Система программного управления задающее воздействие изменяется по некоторому заранее известному закону.
7
3. Следящие системы, у которых вид y(t) заранее неизвестен.
Принято выделять адаптивные системы, которые могут приспособиться к изменениям внешних условий, а также улучшать свою работу по мере накопления опыта.
Адаптивные системы бывают четырѐх видов: а) оптимальные б) самонастраивающиеся
в) самоорганизующиеся г) самообучающиеся.
Оптимальные САУ обеспечивают автоматическое поддержание наилучшего режима функционирования.
Самонастраивающиеся САУ способны изменять свои параметры при изменении внешних условий.
Самоорганизующиеся САУ способны изменять алгоритм работы, то есть система сама изменяет свою структуру.
Самообучающиеся САУ способны накапливать и обрабатывать информацию и на основе этого опыта совершенствовать свою структуру и способы управления.
III. По характеру действия САУ различают системы непрерывного и дискретного действия.
Внепрерывных САУ во всех звеньях выходной сигнал изменяется плавно при таком же изменении входного сигнала.
Всистемах дискретного действия должно быть хотя бы одно звено, у которого выходной сигнал изменяется дискретно при непрерывном изменении входного сигнала.
IV. По характеру преобразования сигнала различают линейные и нелинейные САУ.
V. По характеру зависимости параметров САУ во времени выделяют стационарные и нестационарные САУ.
VI. По количеству управляемых параметров различают одномерные и многомерные САУ.
8
1.3. Программы и законы управления
САУ обычно осуществляют поддержание постоянного значения управляемого сигнала у(t), или его изменение по определенному закону.
При этом программа управления либо задается заранее, либо изменяется во время эксплуатации в зависимости от конкретных условий.
Программы управления могут быть временными (y=y(t)) или параметрическими (y=y (S1,...,Sn), где S – физические параметры объекта управления).
Закон управления – это алгоритм формирования наиболее целесообразного сигнала управления z(t) (рис. 1.2), который должен обеспечить требуемую точность, устойчивость и качество процесса управления. Различают линейные и нелинейные законы управления. Для нелинейных законов управления пока не существует общей теории, однако нелинейные методы хотя и сложнее линейных, но позволяют существенно повысить точность и качество управления.
Принципы построения САУ изучает теория автоматического управления. При построении САУ действует блочно-иерархический подход к проектированию. В процессе разработки эффективной САУ решают задачи синтеза, анализа коррекции, экспериментального исследования и наладки САУ.
Под синтезом САУ понимают выбор схемы взаимодействия элементов САУ, их параметров и характеристик. Требуется получить САУ, удовлетворяющую требованиям технического задания (ТЗ).
В ходе решения задачи анализа САУ по заданной структуре САУ определяют значения показателей эффективности системы и, в случае, если они не соответствуют требованиям ТЗ, изменяют их с помощью методов коррекции.
9
Методы экспериментального исследования и наладки САУ позволяют наиболее рационально исследовать и настроить систему в реальных условиях работы.
Чтобы получить систему, удовлетворяющую ТЗ, приходиться многократно просчитывать различные вариантов схемы и параметров САУ, что соответствует итерациям структурной и параметрической оптимизации в рамках блочно-иерархического подхода.
САУ представляет собой совокупность связанных между собой элементов. Элементы, выполняющие основные функции, называются основными, а остальные – вспомогательными.
Элемент - это конструктивно обособленная часть схемы или системы, выполняющая определенную функцию. Элементы отличаются друг от друга физической природой, принципом действия, схемой включения, конструкцией и т.п.
Общим для всех элементов является передача поступающих на них сигналов в определенном направлении, преобразование сигнала по значению, характеру, и физической природе.
1.4. Основные элементы автоматики
Принято выделять основные элементы автоматики.
1.Датчики – устройства, которые различные неэлектрические величины преобразуют в электрические сигналы.
2.Реле – это устройства, которые с помощью слабых сигналов управляют мощными электрическими цепями.
3.Усилители – устройства, которые усиливают входные сигналы, но не изменяют их физической природы.
4.Стабилизаторы – устройства, которые поддерживают постоянство выходных сигналов.
10
5. Исполнительные элементы – это устройства, которые путем преобразования подводимой к ним энергии приводят в действие какой-либо механизм или объект регулирования под воздействием управляющих сигналов.
6.Распределители – это устройства, которые обеспечивают поочередное подключение различных элементов или цепей
ккакому-либо одному элементу или к одной точке электрической цепи.
7.Вычислительные элементы выполняют математические и логические операции над электрическими или физическими величинами.
Все элементы автоматики различаются по физическим
основам их действия электрические, электромеханические, тепловые, ферромагнитные, пневматические, гидравлические, ионные, электронные, радиоактивные.
Реле, усилители, стабилизаторы, распределители и вычислительные элементы обычно входят в состав устройств управления, датчики – в состав измерительных устройств. Далее будем рассматривать элементы, у которых хотя бы одна из величин ( входная или выходная ) является электрической.
Статические характеристики элементов САУ
Входной величиной элемента могут быть мгновенные значения физических величин, а также амплитудные и частотные значения синусоидальных или импульсных электрических величин.
Основные элементы систем могут работать как в статическом, так и в динамическом режиме.
При установившемся (статическом) режиме работы элементов входные и выходные сигналы постоянны по времени. Свойства элементов определяются с помощью параметров и характеристик.
11
Параметр – это величина, характеризующая существенное свойство элемента. Характеристика отражает зависимость одной величины от другой. Для элементов, находящихся в установившемся режиме, используют статические переменные и характеристики.
Уравнение статики элементов имеет вид:
y=f(x) , |
(1.2) |
где yy(t), x x(t).
Статические характеристики могут быть линейными и нелинейными. Чаще применяют элементы с линейной статической характеристикой, так как при работе в широком диапазоне изменения входных и выходных величин линейные элементы позволяют создать САУ с одинаковыми динамическими и точностными характеристиками на всем диапазоне изменения сигналов.
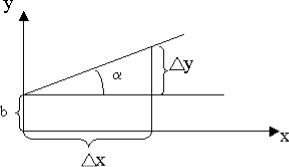
Линейная статическая характеристика имеет вид:
y=kx+b, k=tg(a)= y x=dy dx, |
(1.3) |
где k – коэффициент передачи элемента.
Рис. 1.3
12
В линейном элементе коэффициент передачи постоянный (k=const), а в нелинейном элементе k=k(x).
Если входные и выходные величины элемента имеют одинаковую физическую природу, то коэффициент k размерности не имеет и называется коэффициентом усиления.
Для датчика коэффициент передачи называется чувствительностью. Минимальное значение входной величины, которая может вызвать изменения выходного сигнала, или выходной величины, называется порогом чувствительности.
При изготовлении любого элемента САУ появляется статическая погрешность элемента. Статическая погрешность бывает трѐх видов: абсолютная , относительная и приведенная.
Абсолютная статическая погрешность – это разность между номинальным и фактическим значением выходной величины
|
=|yном - y| . |
|
(1.4) |
||
|
Относительная статическая погрешность обозначается |
||||
|
|
0=у |
|
(1.5) |
|
и |
может быть определена в |
процентном |
отношении как |
||
0 |
100 . |
|
|
|
|
|
Приведенная |
статическая |
погрешность |
обозначается |
|
как |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
( 100 ) |
(1.6) |
|
|
|
||||
уmax – ymin
где [ уmin , ymax]- границы поля допуска.
Если неизвестно действительное значение выходной величины у, то его можно найти как среднее арифметическое
13
нескольких замеров выходной величины.
|
(1.7) |
В этом случае |
погрешность элемента определяется как |
максимальная относительная погрешность
(1.8)
где х , у – приведенные погрешности приборов, на которых проводились измерения входных и выходных параметров соответственно, ymin – минимальное из измеренных значений
yi, а приращение max находится по формуле |
|
max =max yi - ymin . |
(1.9) |
1.6Динамические характеристики элементов
Вреальных САУ сигналы, как правило, изменяются во времени и системы работают в динамическом режиме (x = x(t), y = y(t)). Для оценки работы элементов в динамическом режиме используют динамические характеристики (частотную
ипереходную) и динамические параметры (например, постоянная времени элемента Т ).
Процесс перехода элемента из одного установившегося состояния в другое называется переходным процессом (частный случай динамического режима). Одним из важнейших динамических показателей элемента является его динамическая характеристика, то есть зависимость выходной величины от времени:
y=f(t) . |
(1.10) |
14 |
|
Характер изменения выходной величины зависит от свойств самого элемента и от характера изменения его входной величины. Поэтому для сравнения динамических свойств разных элементов надо подавать на вход одинаково меняющиеся во времени сигналы.
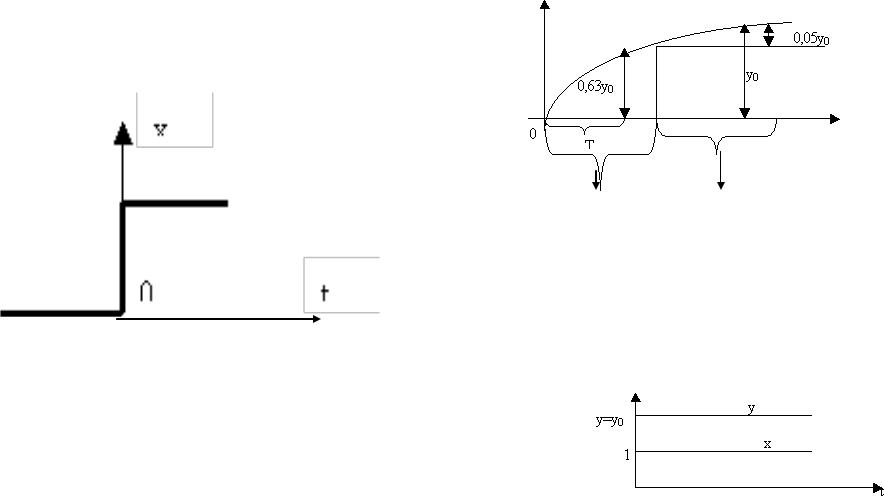
Реакция большинства элементов на скачкообразный входной сигнал (то есть переходная характеристика элемента ) представляет собой нарастающую экспоненту.
Входной сигнал имеет вид единичного скачка (рис. 1.4 ).
Рис. 1.4
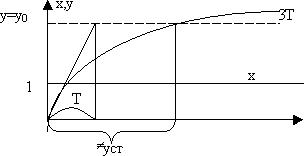
Переходная характеристика изображена на рис. 1.5, на котором используются также следующие обозначения у0 - установившееся значение выходной величины, Т - постоянная времени, которая определяет интервал времени, в течение которого выходной сигнал достигает 63 от установившегося значения. Чем меньше Т, тем круче будет график переходной характеристики, меньше длительность переходного процесса и меньше инерционность элемента, то есть элемент быстрее реагирует на изменение входного сигнала ( рис. 1.5 ).
15
Считается, что элемент находится в установившемся режиме, если значение выходной характеристики у отличается от установившегося значения у0 не больше чем на 5%.
переходный режим установившийся режим
Рис. 1.5
Различные элементы автоматики имеют различные графики переходных процессов, при этом различают 4 основных вида переходных процессов.
1. Переходный процесс без запаздывания (рис. 1.6).
y
t
Рис. 1.6
16
2. Апериодический переходный процесс (рис. 1.7).
t
Рис. 1.7
Степень инерционности переходного процесса оценивается постоянной времени Т. Величину Т можно определить по графику переходной характеристики как расстояние по оси t от начала координат до абсциссы точки пересечения касательной к кривой переходного процесса, построенной в точке начала координат с прямой у=ууст.
3. Колебательно - затухающий процесс, при котором значение у колеблется около установившегося значения с постоянной частотой, равной 1 Т0, где Т0 - период колебаний с непрерывно убывающей амплитудой, tуст - интервал времени, в течение которого выходной сигнал достигает значения, отличающегося от установившегося значения ууст не более чем на у. Величину tуст принято называть временем установления или длительностью переходного процесса.
4. Периодический переходный процесс, при котором амплитуда колебаний остаѐтся постоянной.
В любой момент времени t кривые выходного сигнала у(t) и входного сигнала х(t) имеют разность ординат.
17
Абсолютная динамическая погрешность элемента
= yуст-y(t) . |
(1.11) |
У большинства элементов абсолютная динамическая погрешность после входного скачкообразного сигнала не остаѐтся постоянной, а стремится к некоторому достаточно малому значению. Момент времени, когда называется моментом окончания переходного процесса. Длительность переходного процесса обычно 3Т [1].
2.ЛИНЕЙНЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ САУ
ИИХ ХАРАКТЕРИСТИКИ
2.1.Основные характеристиеи ЛДЗ
Врамках системного подхода САУ рассматривается как сложная система, состоящая из элементов автоматики.
Элементы, из которых состоит линейная САУ, принято называть линейными динамическими звеньями (ЛДЗ) - это наиболее общее и не зависящее от физической природы элемента представление.
Каждое звено характеризуется своим дифференциальным уравнением.
(d0pn +d1pn-1+ ... + dn)х вых=( m0pk + m1pk-1 + ... + mk )х вх, |
(2.1) |
или |
|
d(p)x вых = m(p) х вх, |
(2.2) |
где d(p), m(p) - операторные полиномы от величины p=d/dt. Если дифференциальное уравнение звена составлено при
18