

Учебное пособие 800120
.pdfимеют недостатки, затрудняющие их применение. Так, например, при использовании магнитострикционного метода необходимо периодически размагничивать планшет; точность оцифровывания при использовании резистивного
метода |
зависит |
от |
температуры |
и |
влажности окружающей среды, а |
звукового метода |
- от |
||
чистоты поверхности планшета. |
|
|
||
В графических сеточных устройствах ввода в планшет встраивается ортогональная система - сетка шин проводников. Координаты вводимой точки соответствуют координатам ближайших проводников сетки. С помощью индуктивной (реже емкостной) связи осуществляется взаимодействие с сеткой указателя координат - проволочной миниатюрной катушки с визирем. Через шины сетки последовательно пропускаются импульсы тока. В тот момент, когда возбуждается шина, лежащая под визирем, на его датчике наводится ЭДС. Этот сигнал обрабатывается затем электронным блоком.
В странах СНГ выпускаются полуавтоматические графические устройства ввода, однако для их использования совместно с ПЭВМ, как правило, требуется специальная доработка конструкции (интерфейсы и др.). Популярны компактные планшетные графические устройства ввода с индуктивным съемом координат серии СМ 6424, позволяющие вводить изображения с рабочим полем формата от А4 до А2 с разрешающей
способностью 0,01...0,1 мм. |
|
|
|
|
Наиболее |
известными |
в |
мире |
фирмами, |
выпускающими серийно различные планшеты и дигитайзеры (оцифровыватели), являются фирмы CalComp,
Summagraphics, Curta, Cenins, Acecad, Осе Graphics |
и |
др. |
|||
Размеры |
рабочего поля |
моделей, как правило, |
|||
составляют |
от |
300х300 |
мм до 1200х1200 |
мм |
с |
разрешением |
от 40 до 80 линий/мм. |
|
|
||
|
|
19 |
|
|
|
Более простой способ оцифровывания графической информации для ввода ее в ПЭВМ - применение в качестве указателя координат манипуляторов, например типа «мышь», «трекболл».
Манипулятор «мышь» является одним из простейших, но удобных полуавтоматических средств ввода графической информации. С его помощью легко вводить данные, графику, «раскрашивать» изображение, перемещать курсор или элемент изображения по экрану дисплея и т. п. Манипулятор представляет собой настольный прибор, предназначенный для преобразования его перемещения в двух ортогональных направлениях (X и Y) в серии электрических импульсов и подключаемый к ПЭВМ с помощью тонкого гибкого кабеля. Для ввода графического изображения достаточно положить документ на стол и обежать его «мышью». Используются в основном два принципа работы устройства: механический (оптомеханический) и оптический.
Основой конструкции механического манипулятора типа «мышь» является преобразователь (основание с шаром) (рис. 2.2,а), который вместе с платами с ИМС и управляющими кнопками (клавишами) помещается в пластмассовый корпус.
Адаптер манипулятора типа «мышь» принимает от манипулятора импульсные сигналы (рис. 2.2,б), сопровождающие перемещение манипулятора в направлениях Х и Y, и преобразует их в цифровой код.
Оптический манипулятор типа «мышь» (рис. 2.3,а) перемещается по планшету с нанесенной на него координатной сеткой. Координатная сетка может быть разной ширины с различным количеством линий (рис. 2.3,б). Источник излучения направляет луч света на планшет, и отраженный от сетки луч попадает на фотоприемник, связанный с микропроцессором. Различное
20
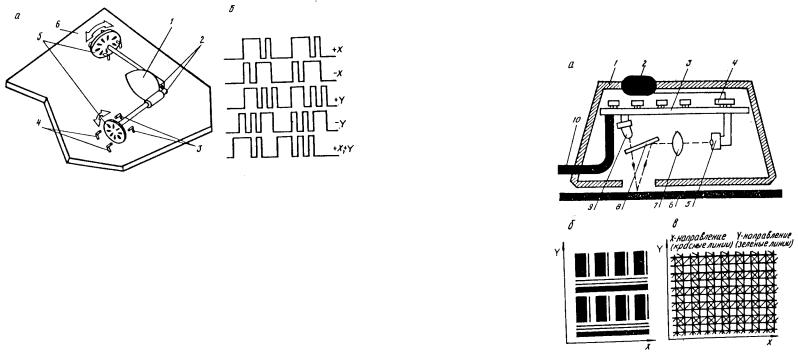
число штрихов в сетке по направлениям Х и Y упрощает распознавание направления.
Рис. 2.2. Оптомеханический манипулятор графической информации типа «мышь»: а - устройство; б - серии импульсов, получаемые при перемещении манипулятора типа «мышь»; 1 - шар; 2 - обрезиненные валики; 3 - фотодиоды; 4 - светодиоды; 5 - диски с прорезями; 6 - основание
Микропроцессор определяет относительное перемещение манипулятора и соответствующее положение курсора на экране дисплея и передает информацию в ПЭВМ. Может использоваться координатная сетка с линиями различного цвета, например красного и зеленого или голубого и желтого (рис. 2.3,в). В этом случае фотоприемники должны реагировать на вполне определенную длину волны оптического излучения.
В базовый комплект большинства современных отечественных и зарубежных моделей профессиональных ПЭВМ включают манипуляторы типа «мышь». Основными фирмами, производящими эти манипуляторы, являются фирмы Microsoft Corp., Logitec, KeyTronic Corp. и др.
21
Они имеют современные эргономические формы с искривленной поверхностью, например типа «куска мыла» или «пера», предусматривают регулирование скорости и чувствительности и режим динамического ускорения, снабжаются специальным программным обеспечением.
Рис. 2.3. Оптический манипулятор графической информации типа «мышь»: а - устройство; б - вариант выполнения координатной сетки с разной шириной и количеством линий; в - вариант выполнения координатной сетки с линиями различного цвета; 1 - корпус; 2 - управляющая клавиша; 3 - плата с ИМС и ЭРЭ; 4 - переключатель управляющей клавиши; 5 - фотодиод; 6 - пластина с координатной сеткой; 7, 8 - линзы; 9 - светодиод; 10 - кабель подсоединения к ПЭВМ
22
Выпускаются также варианты для левой и правой
рук, содержащие от 2 |
до 4 кнопок управления. Длина кабеля |
составляет 1,0...2,3 |
м, имеются и беспроводные |
конструкции, работающие на инфракрасных лучах. Недостатком рассмотренных манипуляторов типа
«мышь» является требование свободной гладкой поверхности стола или даже специального планшета с нанесенной координатной сеткой. Другой тип манипулятора - «трекболл» - не требует планшета или свободного пространства на столе около ПЭВМ, его можно также встроить в корпус ПЭВМ. В этом манипуляторе шаровой механизм вместе с управляющими курсором клавишами расположен вверху корпуса.
Пользователь, вращая шар, перемещает на соответствующее расстояние курсор на экране дисплея.
Основным недостатком полуавтоматических графических устройств ввода является резкое снижение скорости оцифровывания при вводе графической информации в большом объеме или большой плотности.
Эта зависимость от объема и плотности |
информации |
|||
значительно |
уменьшается |
при |
использовании |
|
автоматических графических устройств ввода. |
||||
2.3.4. Автоматические графические устройства ввода |
||||
Современные |
автоматические |
графические |
||
устройства ввода применяются при использовании ПЭВМ в САПР, издательских системах, архивах, для факсимильной связи и т. д. Они позволяют не только вводить в ПЭВМ черно-белые графические изображения (чертежи, графики, диаграммы и др.), но и различать градации их яркости («серая шкала»), а также распознавать текст. Лучшие образцы таких устройств ввода позволяют кодировать
трехмерную информацию, а также |
различать цветные |
23 |
|
изображения. Одной из основных проблем является трудность создания соответствующего программного обеспечения, реализующего эти возможности.
В автоматических графических устройствах ввода используется следящий или сканирующий (развертывающий) метод преобразования. В первом случае рабочий орган устройства ввода отслеживает границу заданной кривой, перемещаясь с постоянной скоростью по оси абсцисс. При этом преобразовываемая кривая представляется в виде числовых значений отклонения рабочего органа по оси ординат. Во втором случае рабочий орган осуществляет сканирование изображения с некоторым шагом по оси абсцисс, в результате фиксируются ординаты точек пересечения сканирующим лучом заданной кривой. Широкую популярность приобрели сканирующие устройства ввода - сканеры. Обязательными компонентами сканеров являются рабочий орган считывания, система закрепления или перемещения вводимого документа, устройство управления (контроллер), программные средства.
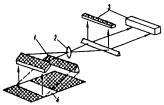
Принцип работы сканеров (рис. 2.4) подобен принципу работы печатающих устройств. В большинстве случаев источник света (светодиоды или лазер) освещает рабочее поле вводимого документа.
Рис. 2.4. Устройство лазерного сканера: 1 - лампа; 2 - оптическая система (линзы, зеркала); 3 - ПЗС-элементы; 4 - документ
24
Чувствительный к свету рабочий орган движется по изображению (или изображение движется относительно неподвижного рабочего органа) и за счет отраженного света считывает элементы изображения, обычно постранично, которые затем распознаются ПЭВМ и преобразуются в файл, размещаемый в памяти машины. В рабочем органе используются датчики на приборах с зарядовой связью (ПЗС), преобразовывающие оптическое изображение в электрический сигнал с разрешающей способностью 10...30 точек/мм и выше.
Лазерные сканеры обладают лучшей разрешающей способностью, чем светодиодные, однако они более дорогостоящие. Желательно, чтобы разрешение рабочего органа было не хуже разрешающей способности дисплея ПЭВМ. При преобразовании полутоновых графических
изображений фиксируется до 256 градаций яркости. В этом случае сканер записывает не только информацию об элементе как о черной и белой точках, но и дополнительную. При дискретизации полутонов «серой шкалы» применяется упрощение: для аппроксимации полутона элемента изображения используется определенное число точек. Большее число точек создает иллюзию темного тона, меньшее - белого. Для различения четырех уровней «серой шкалы» необходимо не менее 2 бит дополнительной информации, при 256 уровнях - уже 8 бит. Для различения трех основных цветов (красного, зеленого и синего) применяются цветовые фильтры и источники с различным спектром излучения. При вводе полутоновых или цветных изображений необходимо обработать большой объем информации, а это предъявляет определенные требования к характеристикам ПЭВМ.
Сканеры выполняются в основном в четырех различных вариантах. В первом используется плоский планшет. Страница вводимого документа закрепляется на
25
плате из стекла, а рабочий орган движется вдоль страницы. Плоские сканеры удобны при вводе графики, так как страница может быть нестандартного размера. В этом случае точность считывания зависит от точности перемещения рабочего органа. Однако плоские сканеры занимают достаточно много места возле ПЭВМ. В сканерах второго типа рабочий орган неподвижен, а вводимый документ перемещается перед окном рабочего органа. Для движения документа используются различные механизмы: барабанного типа, «тракторного» и др. Такие сканеры удобны для ввода многостраничных документов, поскольку они «чувствуют» страницы. Барабанные механизмы перемещения уменьшают габаритные размеры и массу сканеров. Достоинством является также возможность ввода документов с рулонного носителя. Все более популярным становится третий тип - «ручные» сканеры. Рабочим органом в них является малогабаритный датчик, размещаемый в
руке, который, подобно манипулятору типа «мышь», можно двигать или катить по бумаге. Такие сканеры сравнительно дешевы и позволяют вводить в ПЭВМ информацию со сложных поверхностей реальных объектов. В сканерах четвертого типа датчик считывания включается в регистрирующий орган печатающего устройства или графопостроителя.
Современные настольные модели сканеров имеют разрешающую способность по полутонам до 16 линий/мм, прекрасно различают шрифты и формуляры. Автоматическая подача позволяет сканерам принимать до 100 страниц. При применении модулей обработки
изображения максимальная |
разрешающая способность |
|
повышается до 50...64 точек/мм. |
||
|
Недостатком автоматических графических устройств |
|
ввода |
является то, что |
при считывании наряду с |
|
26 |
|
необходимой информацией вводятся и дефекты оригинала, особенно при считывании старых чертежей.
Дальнейшее расширение функциональных возможностей и областей применения графических устройств ввода в значительной степени связано не только с развитием их технических средств (особенно со снижением стоимости и габаритов), но и с развитием программного обеспечения.
2.4.Графопостроители
2.4.1.Назначение и классификация
Графопостроители - устройства вывода информации из ЭВМ, предназначенные для преобразования и записи данных в графической форме на носителе данных. Графическая форма (чертежи, образы, графики, диаграммы, гистограммы и т. п.) представления информации - одна из наиболее распространенных и удобных для человека и по сути единственная, применяемая в качестве технической документации.
Роль графопостроителей в составе профессиональных ПЭВМ непрерывно возрастает. Это связано прежде всего с применением их в системах комплексного автоматизированного проектирования изделий и выпуска графической конструкторской документации на базе ПЭВМ.
Для регистрации информации графопостроители могут использовать различные виды носителей: чертежную, писчую, картографическую и диаграммную бумагу, картон, кальку, холст, пленки различного вида и др.
По принципу создания графических изображений на носителе информации графопостроители делятся на
27
векторные и растровые. В векторных графопостроителях изображение регистрируется с помощью прямых отрезков линий различной длины, воспроизводимых в горизонтальном и вертикальном направлениях (по координатам Х и У) и под углом 45° к ним. В таком случае контур изображения - сложное сочетание этих отрезков. К классу векторных относятся перьевые и фотографопостроители. В растровых графопостроителях изображение формируется на поверхности носителя информации с использованием построчного или постраничного ввода матрицы элементов (точек) этого изображения. К растровым относятся электростатические, чернильно-струйные, а также комбинированные, графопостроители. Последние часто сочетают возможности графопостроителей и печатающих устройств. Аналогично печатающим устройствам в них применяются термический, матричный и лазерный способы печати. Перьевые и матричные ударного действия графопостроители относятся к электромеханическим. Электростатические, термические, лазерные, струйные и фотографопостроители используют немеханические способы регистрации.
По конструктивному исполнению выделяют три основных вида графопостроителей: планшетные, барабанные и роликовые.
Впланшетных графопостроителях изображение выводится на плоский носитель информации, закрепленный на планшете. В большинстве случаев в них используют неподвижно закрепленную листовую бумагу, а в некоторых моделях могут использовать и рулонную.
Вбарабанных графопостроителях изображение выводится на поверхность носителя информации, перемещаемого вращающимся барабаном.
Для подачи носителя информации используется
траковый механизм протяжки бумаги с краевой
28
перфорацией (рулонной или сфальцованной в стопку) либо механизм с микрозахватами, позволяющий использовать неперфорированные носители, как листовые, так и рулонные.
В роликовых графопостроителях, приходящих на смену барабанным, в механизме подачи бумаги применяются специальные фрикционные и прижимные ролики, предотвращающие проскальзывание бумаги.
По размеру выводимых графических изображений различают крупноформатные (форматы носителя АО, А1 по ГОСТ 2.301 68), среднеформатные (форматы А1, А2) и малоформатные (форматы A3 и А4) графопостроители. В зависимости от производительности все графопостроители подразделяют на графопостроители высокой и средней производительности, для ПЭВМ профессионального применения, для ПЭВМ массового применения (рис. 2.5).
2.4.2. Особенности устройства Наибольшее распространение в ПЭВМ получили
векторные электромеханические перьевые малоформатные графопостроители. Это объясняется тем, что при достаточных функциональных возможностях и надежности эти графопостроители имеют низкие стоимость и энергопотребление, малые габаритные размеры и массу, удобны при эксплуатации. Они рассчитаны, как правило, на использование бумажных носителей, позволяют формировать линии графического изображения нескольких толщин и цветов. Основными функциональными частями перьевого векторного графопостроителя для ПЭВМ являются пишущий узел, механизмы закрепления и перемещения пишущего узла и носителей информации, а также устройство управления и пульт управления.
29
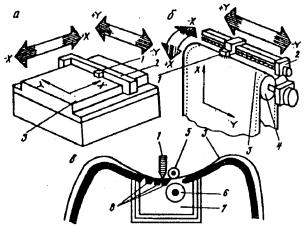
Рис. 2.5. Внешний вид и устройство графопостроителей:
а - планшетного; б - барабанного; в - роликового; 1 - пишущий узел; 2 - каретка; 3 - бумага; 4 - барабан; 5 - прижимной обрезиненный ролик; 6 - подающий ролик; 7 - вакуум; 8 -
вакуумные отверстия-присоски
Важным |
конструктивным |
элементом |
является |
|
пишущий узел. |
В качестве |
пишущих |
элементов |
|
используются |
|
|
|
|
рапидографы, |
шариковые или |
графитные |
стержни, |
|
фломастеры. Важное значение имеет механизм смены пишущих элементов в процессе черчения графического изо-
бражения с линиями различной толщины |
и цвета. |
|||
Применяются |
накопительные |
магазины |
пишущих |
|
элементов вертикального и карусельного |
перемещения, |
|||
независимые |
пишущие |
элементы. |
Перемещение |
|
пишущих элементов осуществляется с помощью привода от сервоили шаговых двигателей.
30
Устройство управления современных графопостроителей, как правило, имеет встроенный, часто высокопроизводительный, микропроцессор (микроЭВМ), ПЗУ с большим набором команд и буферное ЗУ, позволяющее в процессе вычерчивания одновременно принимать управляющую информацию от ПЭВМ. В ПЗУ могут быть записаны библиотеки программ вычерчивания графиков и символов различного вида: геометрических кривых, окружностей с заданным центром и диаметром, гистограмм, диаграмм, различных трехмерных объектов и т. п. Встроенный микропроцессор может выполнять многие вычислительные и логические операции, вследствие чего резко сокращается объем данных, поступающих из ПЭВМ, и облегчается работа центрального процессора. Для выполнения чертежей под управлением ПЭВМ разрабатывается специальное графическое программное обеспечение, во многом аналогичное, например, программному обеспечению печатающих устройств.
2.4.3. Технические характеристики и параметры Основные технические характеристики
графопостроителей:
1) максимальный вычерчиваемый формат, определяемый наибольшим размером прямоугольника по осям координат Х и Y, который может быть вычерчен любым из пишущих элементов гра-
фопостроителя;
2)максимальная скорость вычерчивания по осям координат - наибольшее значение скорости по осям координат Х и Y, достигаемое графопостроителем;
3)максимальное ускорение вычерчивания по осям координат - наибольшее значение ускорения движения пишущего элемента графопостроителя по осям координат Х
иY на участке разгона;
31
4) число пишущих элементов, определяемое возможностью вычерчивания графопостроителем линий разной толщины и различного цвета.
Точностные характеристики вычерчивания графопостроителя зависят от динамической и статической погрешностей. Динамическая погрешность - отклонение вычерченной кривой от расчетной, т. е. кратчайшее расстояние от каждой точки заданной кривой до соответствующей точки кривой, полученной в процессе вычерчивания графопостроителем. Статическая погрешность характеризует наибольшее отклонение длины вычерченного отрезка от заданного по осям координат Х и
Ув пределах максимального вычерчиваемого формата.
Всовокупности значения максимальной скорости и среднего ускорения по осям координат служат для оценки производительности графопостроителя.
Существенными для пользователя являются также разрешающая способность, емкость буферного ЗУ, показатели надежности, энергопотребление, масса, стоимость и особенно характеристики, определяющие такие функциональные возможности графопостроителей, как формирование векторов дуг и окружностей, формирование различных типов линий, генерация стандартных символов, поворот и масштабирование символов, задание определенной скорости вычерчивания.
Совокупность технических характеристик графопостроителя ПЭВМ в значительной мере зависит от конструктивного исполнения графопостроителя.
Планшетные перьевые графопостроители обеспечивают высокую плотность черчения, позволяют вести визуальный контроль результатов работы, более совершенны, но занимают большую площадь, имеют более высокие материалоемкость и стоимость, чем графопостроители других типов.
32
Малогабаритные барабанные перьевые графопостроители, как правило, конструктивно проще планшетных, имеют меньшую материалоемкость (с учетом одинаковых форматов чертежей), занимают небольшую площадь, позволяют вычерчивать чертежи большой длины. Однако точность черчения у барабанных графопостроителей ниже, чем у планшетных, поскольку точность позиционирования при перемещении носителя информации меньше, чем при перемещении пишущего узла.
Роликовые перьевые графопостроители, одни из наиболее распространенных в ПЭВМ, компактны, позволяют работу как с листовой, так и с рулонной бумагой, имеют достаточные точность и скорость черчения, относительно простые механизмы смены пишущих элементов при черчении, низкую стоимость.
В странах СНГ в разное время серийно выпускалось несколько типов моделей графопостроителей, пригодных для работы в составе ПЭВМ. Среди них: ЭМ7042АМ, ЭМ7052, «Электроника МС 6503», СМ 6470.05, «Нейрон ИС.61» и др.
Зарубежными фирмами выпускаются малогабаритные графопостроители (плоттеры) для ПЭВМ с различными техническими характеристиками и функциональными возможностями.
Наиболее известными являются фирмы Calcomp, Hewlett-Packard, Sumnagraphics Corp. и некоторые другие.
Развитие моделей графопостроителей идет по пути создания планшетных, роликовых, а также комбинированных с печатающими устройствами высокоточных и высокоскоростных моделей с рабочим полем различного формата, оснащенных многоперьевыми пишущими узлами. Данные модели обычно воспроизводят многоцветное изображение и имеют возможность обратного
преобразования геометрической информации в цифровую. В зависимости от основных технических характеристик масса моделей графопостроителей составляет 5...20 кг,
Вопросы для самопроверки
1.Перечислите и охарактеризуйте машинные носители информации.
2.Назовите основные методы кодирования графической информации.
3.Изложите структуру, принципы действия и основные технические характеристики устройств ввода информации.
4.Изложите структуру, принципы действия и технические характеристики устройств вывода информации.
5.Назовите принципы действия и основные технические характеристики дисплеев.
6.Назовите особенности ЭВМ, применяемых в
САПР.
7.Перечислите и дайте характеристику технических средств, входящих в состав АРМ конструктора
3. АНАЛИЗ ПОЛЕЙ В КОНСТРУКЦИЯХ РЭС
3.1. Математическое моделирование в конструкторско-технологическом проектировании
В процессе проектирования многократно выполняются такие проектные процедуры как синтез, анализ и оптимизация.
Автоматизация решения этих задач проводится на основе математического моделирования.
34
33
Рассмотрим более подробно последовательность задач синтеза, анализа и оптимизации при конструкторскотехнологическом проектировании РЭС.
1.Анализ ТЗ на разработку конструкции и ТП (выделение основных воздействующих факторов, синтез вариантов структуры ОП).
2.Анализ и выбор лучшего варианта структуры ОП на основе выбранного критерия чувствительности характеристик к внешним воздействиям и синтеза расчетных моделей и моделей чувствительности.
3.Параметрическая оптимизация на основе выбранного критерия оптимальности и сформированных ограничений на параметры.
4.Анализ, синтез и оптимизация допусков на параметры на основе выбранных ограничений на допуски и критерия оптимизации допусков.
5.Расчет и анализ технологической серийно пригодности на основе данных по технологическим разбросам параметров и в соответствии с выбранными показателями серийно пригодности.
6.Расчет и анализ эксплутационной стабильности и надежности на основе данных по зависимостям свойств материалов и деталей от воздействий и в соответствии с выбранными показателями стабильности и надежности.
7.Анализ необходимости и эффективности защиты РЭС от внешних воздействий на основе выбранного способа
исредств защиты и с использованием данных о физикоконструктивных параметрах средств защиты.
8.Синтез системы регулировок, настроек и контроля работоспособности на основе выделения управляемых параметров и доступных для контроля сигналов, а также элементов и узлов с малыми запасами работоспособности.
9.Синтез программы испытаний РЭС, то есть постановка задач испытаний и подготовка данных по условиям проведения испытаний.
35
При этом задачи 4, 5, 6, 7 имеют вероятностный характер. На каждом этапе проектирования используются свои математические модели (ММ). Но все ММ должны обладать свойствами точности, адекватности, экономичности, универсальности [4].
Точность ММ означает степень соответствия модели
объекту проектирования ( ОП ), то есть уфиз. - урасч.Е, где Е - точность ММ, уфиз. - реальное значение параметра, урасч. - значение параметра у, полученное в результате расчета по ММ.
Модель, описывающая ОП с заданной точностью, называется адекватной.
Экономичная модель характеризуется минимальными затратами времени и памяти ЭВМ на расчет по данной модели.
Универсальная ММ пригодна не только для исследования одного конкретного ОП, а для целого класса РЭС или ТП.
Рассмотрим принципы классификации математических моделей.
Полная ММ описывает все возможные физические процессы, происходящие в ОП. Полная ММ очень сложная, многоуровневая. На практике используют только те уравнения, которые описывают исследуемые свойства РЭС или ТП: например, только электрические, механические или тепловые процессы в РЭС. Конечно, это упрощенные модели. Их называют макромоделями.
Структурные ММ характеризуют, из каких элементов строится ОП, при этом РЭС или ТП описывается в виде графов и матриц. Функциональные ММ описывают физические процессы, происходящие в ОП.
Детерминированные ММ, в отличие от вероятностных ММ, не учитывают случайных факторов функционирования ОП.
36
Непрерывные ММ рассматривают поведение ОП в любой момент времени и при всех возможных значениях параметров ОП в пределах допустимых интервалов.
Дискретные ММ изучают поведение ОП только в определенные моменты времени и при определенных наборах значений параметров ОП.
На ранних стадиях проектирования (блоки высшего уровня) ОП рассматривают в целом как очень сложную систему. При этом невозможно исследовать подробно физические процессы, происходящие в РЭС или ТП. Модели, которые используют в таких случаях, называют моделями мегауровня. Обычно это структурные модели - системы линейных алгебраических уравнений (ЛАУ), то есть самые простые расчетные формулы, по сравнению с другими это наименее точные ММ.
На средних уровнях проектирования рассматриваются отдельные блоки ОП. ММ этих уровней называют моделями макроуровня: это обыкновенные дифференциальные уравнения (ДУ), где независимой переменной является только время t (более точные модели по сравнению с моделями мегауровня).
На заключительной стадии проектирования (при проектировании блоков низшего уровня) появляется возможность самого подробного рассмотрения физических процессов. Здесь используют ММ в виде дифференциальных уравнений в частных производных (ДУЧП), где независимыми переменными являются и время t, и пространственные координаты l1, l2, l3. Такие модели называют моделями микроуровня.
Аналитические ММ задают зависимости между параметрами ОП в виде функций типа
Y = F(X), |
(3.1) |
37
в отличие от алгоритмических ММ, где такая зависимость определяется не формулой, а последовательностью правил (алгоритмов), выполнение которых позволяет получить значения выходных характеристик по заданным значениям внутренних параметров.
Принято также проводить классификацию ММ по способу их получения.
Аналитические ММ могут быть получены на основе записи на языке математики основных физических законов (сохранения энергии) – это теоретические ММ.
Если нельзя получить теоретическую ММ, то ММ ОП получают на основе анализа экспериментальных данных - экспериментальные модели (экспериментальностатистические).
Алгоритмические ММ получают:
1)если аналитическая ММ настолько сложна, то используется численный метод расчета по ММ, который реализуется в виде программы для ЭВМ;
2)если не ясен или слишком сложен принцип функционирования ОП, то используется специальный подход к ММ - имитационное моделирование.
3.2. Задачи анализа полей в конструкциях РЭС
3.2.1. Постановка задачи Проектирование качественных изделий
радиоэлектроники требует исследования физических процессов различной природы, протекающих в конструкциях РЭС, включая анализ электрических, магнитных, тепловых полей, а также механических полей нагрузок и деформаций.
Например, среди задач, связанных с исследованием электромагнитного поля в конструкции, можно выделить задачи анализа полей в высоковольтных конструкциях передатчиков и индикаторных устройств на электронно-
38