

2. МикропрограмМируемые контроллеры и микропроцессоры
2.1. Блок микропрограммного управления
2.2. Блок обработки цифровых данных
Микропрограммируемые контроллеры и микропроцессоры являются простейшими, исторически первыми, устройствами, реализующими принцип микропрограммного управления. Изучение принципа построения, функционирования и программирования этих устройств облегчает понимание устройства и процесса функционирования микропроцессоров.
Цель главы – ознакомление с основными принципами построения и функционирования микропрограммируемых контроллеров и микропроцессоров, их схемной реализацией.
После изучения главы необходимо знать
Основные блоки микропрограммируемого контроллера и их назначение,
устройство и назначение блока микропрограммного управления,
устройство и назначение блока обработки цифровых данных,
принцип функционирования микропрограммируемого контроллера,
способы подключения объектов управления.
С истему
управления объектом со структурным
автоматом можно представить в виде
соединения управляющего и операционного
устройств (рис.2.1). Операционное устройство
(ОУ) определяется его конкретным
назначением. Управляющее устройство
(УО) является универсальным и реализуется
в виде структурного управляющего
автомата (УА).
истему
управления объектом со структурным
автоматом можно представить в виде
соединения управляющего и операционного
устройств (рис.2.1). Операционное устройство
(ОУ) определяется его конкретным
назначением. Управляющее устройство
(УО) является универсальным и реализуется
в виде структурного управляющего
автомата (УА).
Выходы комбинационной схемы можно разбить на 2 части (поля) по функциональному назначению: управляющие операционным автоматом и управляющие памятью переменных состояний. Т.о. выход КС представляет собой микрокоманду (МК) с 2 полями: МК для ОА и для УА. При этом двоичное число на входе КС можно рассматривать как адрес некоторой ячейки памяти (ПЗУ), содержимое которой появляется на ее выходе. А память переменных состояний и часть комбинационной схемы - как счетчик микрокоманд, что особенно видно при выполнении последовательности микрокоманд с увеличением двоичного кода состояния на каждом такте. Внешние входы КС и входы условий, поступающие с ОА и информирующие о результате выполненной команды, модифицируют адрес, реализуя условные и безусловные переходы и переходы к одной из начальных программ.
С точки зрения микропрограммного управления
КС рассматривается как микропрограммная
память с входными сигналами, поступающими
на ее адресный вход. Выход комбинационной
схемы разделен на 2 поля: поле управления
ОА и поле управления счетчиком команд.
точки зрения микропрограммного управления
КС рассматривается как микропрограммная
память с входными сигналами, поступающими
на ее адресный вход. Выход комбинационной
схемы разделен на 2 поля: поле управления
ОА и поле управления счетчиком команд.
Управляющие устройства, в которых используется принцип микропрограммного управления, можно разделить на два класса: микропрограммируемые контроллеры (микроконтроллеры) и процессоры команд (микропроцессоры).
Контроллером называется специализированное управляюще-вычислительное устройство, как правило, без пульта управления. Принципиальное отличие этих устройств состоит в числе уровней управления процессом обработки данных. В первом классе такой уровень единственный - уровень микропрограммного управления. Во втором - уровней два: системы команд (уровень программного управления) и микропрограммного управления. Рассмотрим эти два класса.
Микропрограммный контроллер представляет собой микропрограммный автомат для цифровой обработки входных данных. Он синтезируется в виде соединения двух устройств: управляющего устройства и операционного, предназначенного для обработки цифровых данных в двоичной системе счисления (рис.2.2). В качестве операционного устройства может быть любой дискретный объект управления.
Алгоритм его работы представлен в виде программы, составленной из последовательности команд (микрокоманд), записанных в микропрограммной памяти. Эти микрокоманды задают на каждом такте функционирование операционного и управляющего устройств, т.е. блока обработки данных и блока микропрограммного управления.
Вследствие этого основным блоком микроконтроллера является блок микропрограммного управления (БМУ), функцией которого является формирование адреса очередной микрокоманды (МК) в управляющей микропрограммной памяти (МПП). Начальная команда микропрограммы задается (вводится) в БМУ извне.
 Рис. 2.2. Микропрограммный контроллер
Рис. 2.2. Микропрограммный контроллер
В формате микрокоманды обычно выделяют 2 части: одна ее часть определяет функционирование БМУ при определении адреса очередной МК и может быть названа микрокомандой БМУ, другая часть определяет функционирование ОУ и может быть названа микрокомандой ОУ.
В свою очередь микрокоманда БМУ может быть разделена на 2 поля: поле адреса для явного указания адреса очередной микрокоманды и поле управления следующим адресом, определяющее, имеет ли место условный или безусловный переход, и в случае условного перехода - значение каких условий определяет адрес очередной МК. При отсутствии переходов поле управления следующим адресом микрокоманды БМУ содержит указание на формирование очередного адреса.
Для реализации функции управления адресом МК один из разрядов поля управления следующим адресом указывает на вид перехода: условный или безусловный. Кроме того, для каждого условия в поле условных переходов имеются разряды, указывающие на участие данного условия в определении адреса МК. Поле микрокоманды ОУ используется для подачи управляющих сигналов в операционное устройство.
В операционном устройстве выполняются все действия в соответствии с его назначением и выполняемой микропрограммой. Так, если ОУ является АЛУ , то выполняются арифметические и логические операции над входными данными.
Более подробно структурная схема микропрограммного контроллера и его управляющего устройства, существенным образом определяющего быстродействие, представлена на рис. 2.3.

Рис.2.3. Функциональная схема микропрограммного контроллера
Регистр адреса МК, регистр МК и регистр признаков (РгС) могут отсутствовать. Однако их наличие существенно ускоряет выполнение микропрограмм, так как позволяет осуществить совмещение во времени различных операций, выполняемых БМУ, например, выборки микрокоманды и формирование адреса следующей микрокоманды.
Процессор команд в предельно упрощенном варианте представлен на рисунке 2.4. Часть его компонентов - формирователь адресов микрокоманд (ФАМ), микропрограммная память (МПП), регистр микрокоманд (РгМК) - присутствует и в микропрограммируемом контроллере. Однако прикладной алгоритм полностью (или частично) записан не в МПП, а во внешней памяти программ. Прикладной алгоритм выполняется в процессоре как последовательность команд программы. В свою очередь каждая команда интерпретируется своей микропрограммой, т.е. в МПП хранятся микропрограммы интерпретации команд программы.
Соответствие между кодом команды, поступающей в регистр команд (РгК), и микропрограммой устанавливается дешифратором начальных адресов (ДШНА) микропрограмм, реализуемым в виде постоянного запоминающего устройства (ПЗУ).
В операционно-адресной части выполняются все действия по обработке информации, поступающей по шине данных, хранению промежуточных результатов, формированию адресов команд и результатов. В процессорах небольшой производительности формирование адресов команд осуществляется той же аппаратурой, что и арифметическо-логические операции. В высокопроизводительных процессорах функции адресной обработки возложены на специальную аппаратуру. Благодаря распараллеливанию процессов и повышению разрядности выполнение команды осуществляется за один такт.
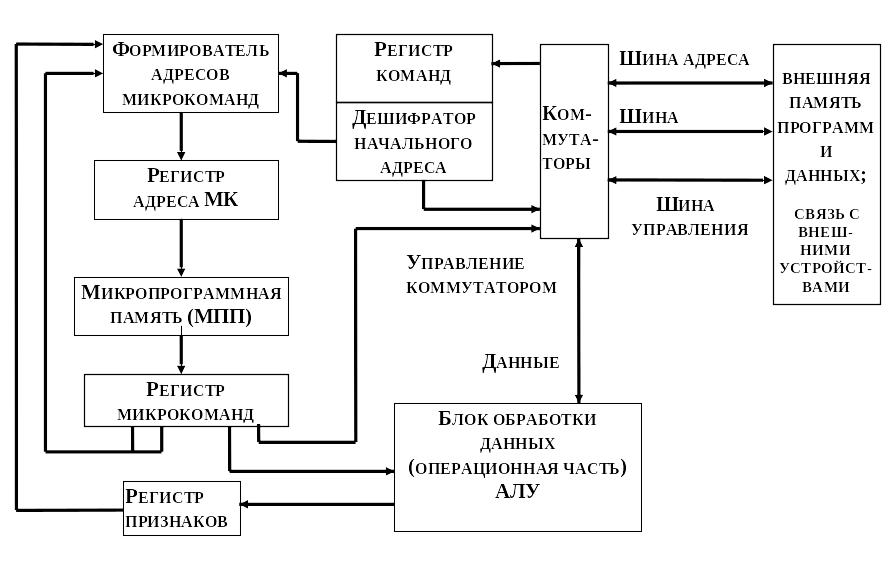
Рис. 2.4. Процессор команд
Более подробно построение и функционирование микропрограммируемого контроллера рассмотрим на примере построения 4-разрядного контроллера на базе микропроцессорного комплекта (МПК) К1804.