

4.2.2. Подключение озу и регистров внешних устройств
Структура интерфейсов для подключения к процессору К580 ОЗУ и внешних устройств целиком определяется протоколом обмена, т.е. системой сигналов в шинах адреса, данных, управления и их временными соотношениями, определяемыми тактами функционирования процессора.
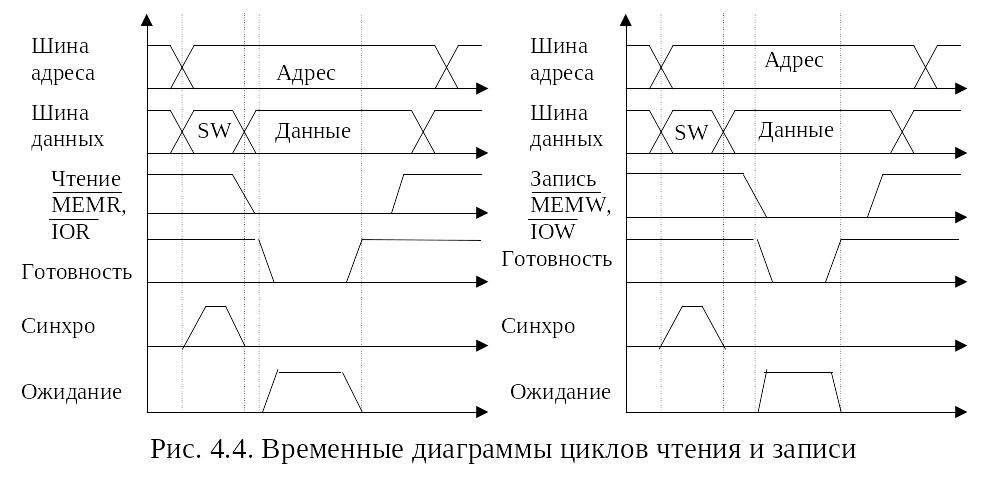
Временные диаграммы циклов чтения и записи (Рис.4.4) содержат только основные сигналы шин, определяющие структуру интерфейса. Они являются базовыми для всех процессоров, имеющих раздельные шины адреса, данных и управления.
В соответствии с приведенными временными диаграммами подключение ОЗУ в системе с раздельными шинами адреса и данных реализуется по функциональной схеме представленной на рис 4.5.
Старшая часть адреса через приемник поступает на дешифратор, который вырабатывает сигнал "устройство выбрано", если адрес совпадает с адресом устройства (блока памяти ОЗУ). Результат дешифрации поступает на вход выбор кристалла микросхемы памяти. Младшая часть адреса поступает на адресный вход ОЗУ, выбирая одну из ячеек памяти. Вход данных ОЗУ (желательно через буфер) подключен к шине данных.
В цикле
запись процессор выставляет адрес и
данные, затем вырабатывает импульсный
сигнал "запись в память" (MEMW)
и данные записываются в ячейку по заднему
фронту импульса. В ц икле
чтения после установки адреса процессор
выставляет сигнал "чтение памяти"
(MEMR),
который вместе с сигналом дешифратора
"устройство выбрано" поступает
на схему совпадения, формируя разрешающий
сигнал для передатчика. Заметим, что
сигналы записи и чтения памяти можно
вводить в обобщенный дешифратор сигналов
адреса и управления, который сформирует
все внутренние управляющие сигналы.
Заметим, что сигналы записи и чтения
снимаются при наличии сигнала “Готовность”.
икле
чтения после установки адреса процессор
выставляет сигнал "чтение памяти"
(MEMR),
который вместе с сигналом дешифратора
"устройство выбрано" поступает
на схему совпадения, формируя разрешающий
сигнал для передатчика. Заметим, что
сигналы записи и чтения памяти можно
вводить в обобщенный дешифратор сигналов
адреса и управления, который сформирует
все внутренние управляющие сигналы.
Заметим, что сигналы записи и чтения
снимаются при наличии сигнала “Готовность”.
П одключение
внешних устройств производится
аналогично, но в этом случае проводится
полная дешифрация всего адреса. Пример
функциональной схемы подключения
внешних устройств приведена на рис.4.6.
одключение
внешних устройств производится
аналогично, но в этом случае проводится
полная дешифрация всего адреса. Пример
функциональной схемы подключения
внешних устройств приведена на рис.4.6.
Устройство сопряжения с объектом управления может содержать несколько параллельных регистров ввода-вывода. Разряды выходных регистров подключаются к объектам управления для дискретного управления ИМ. Выходные дискретные сигнала от ОУ чаще всего поступают непосредственно на входы передатчиков (используется виртуальный входной регистр).
При подключении регистров внешних устройств необходима дешифрация всего адреса. Каждый входной или выходной регистр имеет свой адрес. Поэтому число выходов дешифратора адреса равно числу регистров. Для формирования сигналов записи и чтения регистров, выходы дешифратора адреса объединяются по схеме "И" соответственно с сигналами "вывод" (IOW) или "ввод" (IOR) шины управления. Возможно, а иногда целесообразно, использовать обобщенный дешифратор адреса и управляющих сигналов, который объединяет по схеме "И" сигнал "Устройство выбрано" каждого отдельного регистра с сигналом "Ввод" или "Вывод", формируя управляющие сигналы для своих регистров.
При выводе данных процессор устанавливает адрес, данные и, с задержкой, сигнал "Вывод", по которому данные записываются в адресуемый регистр. При чтении процессор устанавливает адрес и, с задержкой, сигнал "Ввод". При этом вырабатывается сигнал включения передатчика и данные поступают в шину данных.
Внешнее устройство, не успевающее выполнять обмен в темпе процессора, должно снимать сигнал готовности при обращении по его адресу и восстанавливать этот сигнал при завершении обмена. Для снятия сигнала готовности используется логический элемент (передатчик) с открытым коллектором, подключенный к линии “Готовность”.
В качестве регистров выходных данных и приемопередатчиков (виртуальных входных регистров) целесообразно использовать программируемый параллельный интерфейс (микросхему ППИ).