

Учебное пособие 2078
.pdfПри С > 4 значение K можно определить достаточно точно по формуле
K 1 |
1,5 |
. |
(9.69) |
|
|||
|
C |
|
|
Напряжение в пружине при полном сжатии до соприкосновения витков,
МПа:
G( t d )d / 106 D2 . |
(9.70) |
Кратковременное напряжение в пружине при полном сжатии витков может составлять 450 – 500 мПа.
Рис. 9.3. График зависимости коэффициента К от индекса пружины С
Пневмобаллоны. В последнее время в качестве упругих опор все чаще применяют резинокордные баллоны, которые имеют существенные преимущества перед винтовыми пружинами. Баллоны имеют прокладки из высокопрочного корда и обкладки из резины специальных сортов, обладающей высокой прочностью на разрыв и стойкостью к воздействию высоких температур. Они долговечны и обладают следующими преимуществами. Грузоподъемность и жесткость элементов можно изменять, меняя давление сжатого воздуха в них. Поэтому пневмобаллон одного и того же типа может с успехом применяться на разных по массе виброгрохотах, при различных параметрах их колебаний. Упругая характеристика пневмобаллонов нелинейна. По мере увеличения амплитуды колебаний короба грохота в период его остановки жесткость пневмобаллона, а следовательно, и собственная частота колебаний короба увеличиваются, в результате чего грохот быстрее выходит из режима резонансных колебаний при относительно меньших амплитудах колебаний. Пневмобаллоны не создают дополнительного шума.
61

Для виброизоляции виброгрохотов применяются следующие пневмобаллоны: двуполостные типа И – 01; однополостные типов И – 01 (одна из камер полностью исключена из работы) и И – 15. Характеристика пневмобаллонов дана в табл. 9.5.
Пневмобаллоны типа И – 01 могут работать в широком диапазоне нагрузок, и поэтому они предпочтительны для применения в качестве виброизоляторов грохотов. Пневмобаллоны рассчитаны на нагрузку до 12 кН при внутреннем избыточном давлении 0,25 МПа.
Основными параметрами пневмобаллонов являются наружный диаметр, рабочая высота без учета толщины фланцев, жесткость в вертикальном направлении и отношение жесткости в вертикальном Сy и горизонтальном Сx
направлениях (табл. 9.5).
|
|
|
|
|
|
|
Таблица 9.5 |
|
|
|
|
Конструктивные параметры пневмобаллонов |
|
|
|||
|
|
|
|
|
|
|
|
|
Статическая |
|
|
|
Наружный диаметр, |
Рабочая высота, |
|
|
|
нагрузка на один |
|
|
|
Сх /Су |
|
|||
|
|
мм |
мм |
|
|
|||
пневмобаллон, кН |
|
|
|
|
||||
|
|
|
|
|
|
|||
|
|
Двуполостный пневмобаллон типа И – 01 |
|
|
||||
1,96 |
|
|
|
252 |
294 |
|
0,092 |
|
3,92 |
|
|
|
253 |
292 |
|
0,086 |
|
5,88 |
|
|
|
254 |
290 |
|
0,080 |
|
7,84 |
|
|
|
255 |
288 |
|
0,075 |
|
9,8 |
|
|
|
256 |
296 |
|
0,070 |
|
11,7 |
|
|
|
257 |
284 |
|
0,066 |
|
|
Однополостный пневмобаллон типа И – 01 |
|
|
|||||
1,96 |
|
|
|
256 |
124 |
|
0,45 |
|
3,92 |
|
|
|
259 |
118 |
|
0,39 |
|
5,88 |
|
|
|
262 |
112 |
|
0,33 |
|
7,84 |
|
|
|
265 |
107 |
|
0,28 |
|
9,8 |
|
|
|
268 |
102 |
|
0,24 |
|
11,7 |
|
|
|
271 |
98 |
|
0,20 |
|
|
Однополостный пневмобаллон типа И – 15 |
|
|
|||||
1,96 |
|
|
|
206 |
106 |
|
0,34 |
|
3,92 |
|
|
|
210 |
102 |
|
0,32 |
|
Оптимальное давление в конкретном пневмобаллоне определяется статической нагрузкой с учетом устойчивости грохота в горизонтальном направлении и минимальных собственных частот колебаний. Для грохотов строительной индустрии оптимальное внутреннее давление Р(Па) в зависимости от статической нагрузки G(кН) на пневмобаллон, по рекомендациям ВНИИСтройдормаша, определяется для различных типов по следующим зависимостям:
И – 01 (двуполостного) – Р = 50G – 29400;
Я – 01 (однополостного) – Р = 25G + 68600;
62

И – 15 (однополостного) – Р = 50G + 4900.
Зависимость вертикальной жесткости Сy от нагрузки для указанных типов пневмобаллонов представлена на рис. 9.4.
Рис. 9.4. Зависимость вертикальной жесткости Сy пневмобаллонов
от статический нагрузки: 1 – для типа И – 01 (двуполостного); 2 – для типа И – 01 (однополостного); 3 – для типа И – 15
Резиновые упругие элементы в вибрационных машинах находят широкое применение. Во многих случаях они служат в качестве виброизоляторов. Допускаемые напряжения в резине в 20 1000 раз меньше, чем у стали, а модуль
упругости в 104 2 105 раз ниже. Достоинства резиновых элементов определяются их нелинейной упругой характеристикой, связанной с высоким коэффициентом поглощения энергии, а также снижением уровня шума по сравнению с цилиндрическими винтовыми пружинами.
Для виброизоляции грохотов используются резиновые упругие элементы с мягкой характеристикой. Виброизолирующие опоры в виде резиновых элементов втулочного типа использованы в грохоте ГИСТ–72 (рис. 9.5). Резиновые опоры 1 имеют возможность смещаться в горизонтальном направлении, перекатываясь в углублениях гофрированных стальных пластин 2, жестко связанных с вибрирующим кронштейном 3 опоры и опорной плитой 4.
Рис. 9.5. Конструктивная схема резиновой виброизолирующей опоры грохота: 1 – резиновые упругие элементы; 2 – гофрированные фиксирующие элементы; 3 – кронштейн; 4 – опорная плита; 5 – направляющая втулка,
сопрягающаяся с цапфой грохота
63
Это позволяет уменьшать горизонтальные динамические нагрузки, передаваемые на строительные конструкции, в особенности в переходных режимах, вызывающих резкое возрастание амплитуды колебаний грохота.
Такие резиновые элементы обладают высокой работоспособностью. Наличие в них центрального отверстия повышает эластичность и способствует лучшему отводу тепла и охлаждению. Расчет резиновой втулки сводится к определению вертикальной жесткости Сy и величины осадки под статической
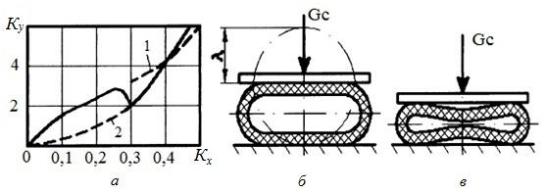
нагрузкой Gc. Параметры сжатия определяется по формулам
K y 12Gc R2 / Eб3 и K x / R ,
где R – радиус недеформированной втулки, м;
Е – модуль упругости, Н/м2; б – толщина стенки втулки, м.
Вычислив величину Кy по графику (рис. 9.6, а), находят соответствующее значение параметра Кx. Определив значение осадки , рассчитывают вертикальную жесткость элемента (Н/м) по формуле Cy Cc / .
Рис. 9.6. Характеристика деформации резиновой втулки: а – зависимость параметров Ky и Кx;
б, в – схемы деформации резиновой втулки
При / R 0,285 резиновая втулка из одной формы деформированного состояния переходит в другую (рис. 9.6, б, в).
Деформационному состоянию равновесия I (рис. 9.6, б) соответствует кривая 1 , а состоянию II (рис. 9.6, в) – кривая 2 на графике.
В небольших грохотах типа ГИТ нашли применение резиновые виброизолирующие опоры типа АР (рис. 9.7). Использование их обеспечило возможность уменьшить примерно в 3 раза по сравнению с цилиндрическими винтовыми пружинами амплитуду колебаний грохотов в резонансной зоне при выбеге и время прохождения через резонанс сократить до 2 – 3 секунд, а также значительно снизить уровень шума.
64

Рис. 9.7. Резиновый виброизолирующий элемент опоры типа АР:
1 – опорная рама грохота; 2 – опорная плита грохота
9.3. Расчет гирационных (эксцентриковых) грохотов
Расчет гирационных (эксцентриковых) грохотов сводится к определению оптимального числа оборотов эксцентрикового вала, производительности и потребляемой мощности.
На куски (зерно) материала (рис. 9.8) действуют сила тяжести G, центробежные силы инерции Pu и сила трения T :
P m 2 r Н, |
(9.71) |
u |
|
где m – масса куска, кг;
ω – угловая скорость, рад/с; r – эксцентриситет вала, м.
Раскладываем силу тяжести G на ее составляющие Gcos α и Gsin α , из них сила Gcos α прижимает кусок к ситу, а сила Gsin α стремится сдвинуть его вниз. В свою очередь сила иsin β стремится оторвать частицу от сита, а сила
иcos β – сдвинуть вниз.
Сила трения Т препятствует движению куска материала вниз:
T ( G cos Pu sin ) f , |
(9.72) |
где f – коэффициент трения куска о сито.
65

Рис. 9.8. Схемы к расчету гирационных грохотов:
а, б – схемы движения материала вниз в I и II квадрантах
Для обеспечения движения материала вниз необходимо, чтобы
( G sin Pu cos ) ( G cos Pu sin ) . |
(9.73) |
|
При направлении действия силы и под углом β во II квадранте для обес- |
||
печения движения вниз необходимо, чтобы |
|
|
|
G sin T Pu cos( 180 ) ; |
(9.74) |
G sin [(G cos Pu cos( 90 )] f Pu cos( 180 ) . |
(9.75) |
|
Очевидно, что, |
когда сила и находится в I и IV квадрантах, сила G sin α |
|
складывается с силой |
иcos β . Сила, вызывающая движение куска вниз, будет |
|
наибольшей при β=0, так как в этом случае величина иcos β = |
и, т.е. макси− |
|
мальная. |
|
|
Во II квадранте, также и в III составляющая от силы Pu вычитается из составляющей веса. Наименьшее значение общей силы, вызывающей движение
вниз, будет при β=180º , так как в этом случае величина силы |
иcos (180−β), |
|
стремящейся задержать движение вниз, будет максимальной. |
|
|
Проанализируем условия движения материала вниз при различных |
||
положениях. |
|
|
1. |
При β=0 |
|
|
Pu cos Pu m 2r . |
(9.76) |
Сила трения возникает только от действия силы тяжести и будет равна
T Gf cos α . |
(9.77) |
66

В этом случае получим:
G sin Pu fGcos , |
(9.78) |
G sin m 2 r fGcos , |
(9.79) |
откуда
2 ( fGcos G sin ) / mr .
Заменяя на G/g и сокращая G в правой части, получим
2 ( f cos sin )g / r .
Заменяя ω на 2πn (n − число оборотов вала, об/с), получим :
4 2 n2 ( f cos sin )g / r ,
n 
 ( f cos sin )g / 4 2 r ,
( f cos sin )g / 4 2 r ,
n 21 
 ( f cos sin )q / r об/с.
( f cos sin )q / r об/с.
Заменяя f на tg φ (φ – угол трения), получим
n 21 
 ( tg cos sin ) / r .
( tg cos sin ) / r .
Заменяя tg φ на sin φ/cos φ, после преобразования получим
(9.80)
9.81)
(9.81)
(9.82)
(9.83)
(9.84)
n 1 |
|
|
|
|
2 |
(sin( ) / r cos об/с. |
(9.85) |
||
|
|
|
|
|
При этом числе оборотов вала материал будет двигаться вниз.
2. При 180 имеем Pu cos( 180 ) Pu и Pu cos( 180 90 ) 0 ,
при этом направление силы Ри противоположно Gsin α, тогда
G sin Pu fGcos ; |
|
G sin m 2 r fGcos . |
(9.86) |
67 |
|

Заменяя m на G/g, после преобразования получим |
|
|||||
sin 2 r / q f cos . |
(9.87) |
|||||
Заменяя ω на 2π и решая неравенство относительно |
, по аналогии с |
|||||
(9.85) получим |
|
|
|
|
||
|
1 |
|
|
|
|
|
n |
|
sin( ) / r cos об/с. |
(9.88) |
|||
|
||||||
2 |
|
|
|
|
||
Формула (9.85) показывает, что при β=180° (формула выведена для β=180°) движение материала по ситу возможно только в том случае, когда угол наклона сита будет больше угла трения, а число оборотов вала удовлетворяет выражению (9.87). В противном случае материал будет двигаться вверх. Аналогично получим:
|
|
1 |
|
|
|
|
при β=90° |
n |
|
sin( ) / r sin об/с, |
(9.89) |
||
2 |
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
при β=270° |
n |
|
sin( ) / r sin об/с. |
(9.90) |
||
2 |
|
|||||
|
|
|
|
|
|
|
Для обеспечения подбрасывания материала на сите должно быть |
||||||
соблюдено условие |
|
|
|
|
|
|
|
|
|
|
Pu G . |
(9.91) |
|
При этом материал будет подбрасываться при
G cos m 2 r G4 2 n2 r / g , |
(9.92) |
откуда
n 1 |
|
|
|
|
2 |
cos / r об/с. |
(9.93) |
||
|
|
|
|
|
9.4. Расчет инерционных грохотов
При технологическом расчете вибрационного инерционного грохота определяют зависимости между весом грохота, радиусом, весом и частотой вращения дебаланса, а также между параметрами грохота и потребляемой им мощностью.
68

Рис. 9.9. Схема дебаласного вала
Вибрация грохота возникает при наличии на валу дебалансного груза m весом G (рис. 9.9). При вращении этого груза на вал действует центробежная сила инерции
P m 2r G / gv2 / r 2r G / gv2 / r 2r G / gr( nr / 30 )2 Grn2 / 900 . (9.94)
Если грохот на пружинных опорах, то пружины будут растягиваться при прохождении дебалансом верхней полуокружности, сжиматься – при прохождении нижней окружности, отклоняться влево – при прохождений левой полуокружности и вправо – при прохождении правой. Чаще всего грохот опирается на рессоры или подвешивается на них, что не позволяет ему отклоняться влево или вправо, и грохот вибрирует только в направлении, перпендикулярном к плоскости сита.
Определим зависимость между весом грохота GГ и амплитудой его вибраций e, весом вибратора G и радиусом его вращения r. Если грохот подвешен на z пружинах, то на одну пружину приходится вес, равный
Gо GГ / z . |
(9.95) |
Этот груз деформирует пружину на величину a(м).
При масштабе пружины (в качестве масштаба выбрана сила, растягивающая или сжимающая пружину на 1 м), кН:
a Gr / zk Gо k . |
(9.96) |
Период упругого колебания массы грохота, подвешенного на пружинах, можно найти по формуле, известной из теории упругих колебаний:
|
|
|
|
|
|
|
tc 2 |
m / k 2 |
Gо / gk 2 a / g . |
(9.97) |
|||
|
69 |
|
|
|
|
|

Период колебаний грохота от возмущающей центробежной силы вибратора равен времени одного оборота вала вибратора, т. е.
t 60 / n , |
(9.98) |
где n – частота вращения, мин-1.
Затраты энергии меньше, если собственные колебания массы грохота совпадают с колебаниями, вызываемыми вибратором, т. е.
tc t |
(9.99) |
или
|
|
|
|
|
|||||||
2 |
|
Gо / gk 60 / n , |
(9.100) |
||||||||
G |
/ gk 900 / 2 n2 , |
(9.101) |
|||||||||
о |
|
|
|
|
|
|
|
|
|
|
|
G / gk G |
Г |
/ gk z 900 / 2 n2 . |
(9.102) |
||||||||
о |
|
|
|
|
|
|
|
|
|
|
|
Отсюда масштаб пружины равен |
|
|
|
|
|
|
|
|
|
|
|
k G n2 |
/ 900 G |
Г |
n2 / 900z . |
(9.103) |
|||||||
о |
|
|
|
|
|
|
|
|
|
|
|
Величина возмущающей центробежной силы Р |
вибратора, (Н), |
||||||||||
приходящаяся на одну пружину, составляет |
|
|
|
||||||||
P P / z G |
Г |
n2 / 900z , |
(9.104) |
||||||||
о |
u |
|
|
|
|
|
|
|
|
||
а величина деформации сжатия или растяжения пружины, вызываемая этой силой, соответственно равна
e Pu /k |
(9.105) |
или
k P / e Grn2 |
/ 900ze . |
(9.106) |
о |
|
|
Из выражений (9.91) и (9.94) имеем
GГ /( 900n2 z ) GГ rn2 / 900ze или |
GГ e GГ r . |
(9.107) |
70