

Учебное пособие 1816
.pdfПримеры линейных пространств
1. R1 – множество всех векторов, лежащих на одной прямой l , с обычными операциями сложения векторов и умножения вектора на число (рис. 1).
l
a
b
Рис. 1. Множество векторов, лежащих на одной прямой
2. R2 – множество всех векторов, лежащих в одной плоскости, с введенными обычными операциями сложения векторов и умножения вектора на число (рис. 2).
a
b
Рис. 2. Множество векторов, лежащих в одной плоскости
3.R3 – множество всех векторов, лежащих в пространстве, с обычными операциями сложения векторов и умножения вектора на число.
4.Множество всех матриц {Am×n } размера m ×n с обычными операциями сложения матриц и умножения на число.
5.Множество всех многочленов {Pn (x)} степени не выше n с обычными операциями сложения многочленов и умножения на число.
Отметим, что множество всех многочленов степени n не будет образовывать линейного пространства, так как при сложении двух многочленов
41
может получиться многочлен, степень которого может оказаться меньше n .
6.Множество C[a,b] ={y = y(x)} всех непрерывных на отрезке [a, b] функций.
7.Множество упорядоченных наборов из n чисел
Rn ={(x1, x2 ,..., xn )}, где x1, x2 ,..., xn – некоторые числа,
с операциями сложения и умножения на число, вводящимися так же, как и для матриц, т.е. соответствующие компоненты складываются и умножаются на число. Такое пространство будем называть n -мерным координатным пространством.
8. Приведем пример множества, не являющегося линейным пространством. Множество его элементов определим как наборы из n чисел, как и в предыдущем примере, причем операция сложения будет определяться по такому же правилу, как и в примере 7 – сложение соответствующих компонентов, а операция умножения на число по другому правилу, а именно
α x = (αx1, x2 ,..., xn ).
Проверим, выполнена ли в таком случае аксиома 7. С одной стороны,
(α + β) x = ((α + β)x1, x2 ,..., xn ).
А с другой
α x + β x = ((α + β)x1,2x2 ,...,2xn ).
Очевидно, что (α + β) x ≠α x + β x . Следовательно, указанное множество не образует линейного пространства.
4.2. Линейная зависимость и независимость векторов
Определение. Векторы x1, x2 ,..., xk линейного пространства R называются линейно зависимыми, если существуют такие числа α1,α2 ,...,αk , не равные одновременно нулю, что
α1x1 +α2 x2 +... +αk xk =θ . |
(4.1) |
42

Векторы, не являющиеся линейно зависимыми, называются линейно не-
зависимыми.
Другими словами, для линейно независимых векторов равенство (4.1) выполняется тогда и только тогда, когда α1 =α2 = ... =αk = 0.
Пусть векторы x1, x2 ,..., xk R линейно зависимы, тогда существуют такие числа α1,α2 ,...,αk , хоты бы одно из которых отлично от нуля, что выполнено равенство (4.1). Для определенности будем считать, что αk ≠ 0 . Тогда (4.1) можно записать в виде
Обозначим
но записать как
xk
Ci = − αi
αk
= − |
α1 |
x1 |
− |
α2 |
x2 |
−... − |
αk −1 |
xk −1 . |
|
αk |
αk |
αk |
|||||||
|
|
|
|
|
|
, i =1,2,..., k −1. Тогда последнее выражение мож-
xk = C1x1 +C2 x2 +... +Ck −1xk −1 . |
(4.2) |
Если имеет место выражение (4.2), то говорят, что вектор xk |
является |
|
линейной комбинацией векторов x1, x2 ,..., xk −1 , или, |
что вектор xk |
линейно |
выражается через вектора x1, x2 ,..., xk −1 . Таким |
образом, если |
векторы |
x1, x2 ,..., xk линейно зависимы, то, по крайней мере, один из них линейно вы-
ражается через остальные. Ясно, что верно и обратное, т.е. что если одни из векторов линейно выражается через остальные, то все эти векторы в совокупности линейно зависимы.
Рассмотрим примеры линейно зависимых и независимых векторов.
Пример 1. Множество R1 всех векторов, лежащих на одной прямой. В этом линейном пространстве любые два вектора линейно зависимы. Действительно, пусть a и b – два вектора, лежащие на одной прямой, тогда найдется такое число λ , не равное нулю, что a = λb . Т.е. вектор a линейно выражается через вектор b и эти два вектора линейно зависимы.
Пример 2. Множество R2 всех векторов, лежащих в одной плоскости. В этом линейном пространстве любые два неколлинеарных вектора линейно независимы ([3, §4, c. 31]), а любые три вектора линейно зависимы, так как любой вектор плоскости может быть разложен по двум неколлинеарным векторам.
43
Пример 3. Множество R3 всех векторов, лежащих в трехмерном пространстве. В этом линейном пространстве любые три некомпланарных вектора линейно независимы, а любые четыре вектора линейно зависимы ([1, гл. 1, §2, c. 65]).
4.3. Размерность и базис линейного пространства
Определение. Линейное пространство R называется n -мерным, если в нем можно найти n линейно независимых векторов, а любые (n +1) векторы линейно зависимы.
Таким образом, размерность пространства – это максимальное число содержащихся в нем линейно независимых векторов. Размерность пространства обозначается dim(R) .
Линейное пространство размерности n называется n -мерным линей-
ным пространством и обозначается Rn .
Из рассмотренных ранее примеров следует, что dim(R1 ) =1, dim(R2 ) = 2 , dim(R3 ) = 3.
Пространство, имеющее конечную размерность, называется конечномерным. Если в пространстве можно указать сколь угодно много линейно независимых векторов, то оно называется бесконечномерным. Например, пространство C[a,b] непрерывных на отрезке [a, b] функций является бесконеч-
номерным.
Определение. Базисом n -мерного линейного пространства Rn называется любая упорядоченная система n линейно независимых векторов.
Теорема. Любой вектор x линейного n -мерного пространства Rn можно всегда представить, и притом единственным образом, в виде линейной комбинации векторов базиса.
Доказательство. Пусть x – произвольный вектор n -мерного пространства, а e1, e2 ,..., en – базис в Rn . Так как любая система (n +1) векторов является линейно зависимой, то существует набор чисел α1,α2 ,...,αn ,α , не всех равных нулю, таких, что выполняется равенство
α1e1 +α2e2 +... +αnen +αx =θ .
44
Очевидно, что именно α ≠ 0 , так как если α = 0 , то в силу линейной независимости векторов e1, e2 ,..., en все αi = 0 , что противоречит условию линейной зависимости. Значит, можно последнее равенство записать так
x = −αα1 e1 − αα2 e2 −... − ααn en .
Обозначим xi = −ααi , i =1,2,..., n . Окончательно получим
x = x1e1 + x2e2 +... + xnen . |
(4.3) |
Таким образом, получено разложение произвольного вектора x по векторам базиса e1, e2 ,..., en .
Покажем, что в заданном базисе разложение (4.3) будет единственным. Действительно, пусть существует помимо (4.3) еще одно разложение
x = y1e1 + y2e2 +... + ynen ,
тогда, вычитая из уравнения (4.3) второе уравнение, получим
θ = (x1 − y1 )e1 + (x2 − y2 )e2 +... + (xn − yn )en .
Так как векторы e1, e2 ,..., en образуют базис, то последнее условие будет выполняться тогда и только тогда, когда
x1 = y1, x2 = y2 ,..., xn = yn ,
что и доказывает единственность разложения по векторам базиса.
Числа xi , i =1,2,...,n , называются координатами вектора x в базисе e1, e2 ,..., en . Вследствие теоремы о разложении в данном базисе вектор x может быть задан набором чисел (координат)
x = (x1, x2 ,..., xn ).
Отметим, что между вектором и его координатами (в некотором базисе) устанавливается взаимнооднозначное соответствие.
45
Замечание. Координаты вектора x могут быть записаны как строкой
x1
x = (x1, x2 ,..., xn ), так и столбцом x = xM2 , который будем называть коорди-
xn
натным столбцом. Кроме того, можно показать, что векторы линейно зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы. (Доказательство см., например, [2, гл. 6, §1, c. 193]).
4.4. Действия над векторами
Пусть x = x1e1 + x2e2 +... + xnen и y = y1e1 + y2e2 +... + ynen – векторы n - мерного линейного пространства Rn , разложенные по одному базису.
1. Сложение векторов
x + y = (x1 + y1 )e1 + (x2 + y2 )e2 +... + (xn + yn )en = (x1 + y1, x2 + y2 ,..., xn + yn )
Итак, при сложении векторов их координаты складываются.
2. Умножение вектора на число
λx = λx1e1 + λx2e2 +... + λxnen = (λx1, λx2 ,...,λxn ).
При умножении вектор на число координаты вектора умножаются на это число.
3. Разность векторов
x − y = x +(−1) y = (x1 − y1 )e1 +(x2 − y2 )e2 +... +(xn − yn )en = = (x1 − y1, x2 − y2 ,..., xn − yn )
Итак, при вычитании векторов их координаты вычитаются.
Пример 1. Рассмотрим пятимерное пространство R5 , в котором базисом является набор векторов e1, e2 , e3, e4 , e5 . Найдем координаты векторов e2 и x = 3e1 − e3 + 2e4 в указанном базисе.
Разложение вектора e2 по базису имеет вид
46
e2 = 0 e1 +1 e2 +0 e3 +0 e4 +0 e5 ,
отсюда координаты вектора e2 будут (0,1,0,0,0). Разложение вектора x по базису имеет вид
x = 3 e1 +0 e2 −1 e3 + 2 e4 +0 e5 ,
следовательно, координаты вектора x будут (3,0,−1,2,0).
Пример 2. Даны координаты векторов x и y в некотором базисе x = (2,−1,3,5), y = (−1,4,0,−2). Найти координаты вектора 2x −3y .
Используя правила умножения вектора на число и вычитания векторов, получаем
2x −3y = 2(2,−1,3,5)−3(−1,4,0,−2)= (7,−14,6,16).
Пример 3. Даны векторы a = e1 + e2 + e3 , b = 2e2 + 3e3 , c = e2 +5e3 , где e1 , e2 , e3 – базис линейного пространства R .
1.Доказать, что векторы a , b и c образуют базис.
2.Найти координаты вектора d = 2e1 − e2 + e3 в базисе a , b , c . Отметим, что размерность пространства R равна трем, так как именно
три вектора e1 , e2 , e3 образуют базис. Следовательно, для того чтобы векторы a , b , c образовывали базис, достаточно, чтобы они были линейно независимыми. Проверим это.
Составим линейную комбинацию векторов a , b , c :
α1a +α2b +α3c =θ .
Запишем полученное выражение в координатной форме в базисе e1 , e2 ,
e3 : |
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
0 |
|
|
0 |
|
|||
|
|
2 |
|
|
1 |
|
|
0 |
|
, |
α1 1 |
+α2 |
+α3 |
|
|
= |
|
||||
|
|
3 |
|
|
5 |
|
|
0 |
|
|
1 |
|
|
|
|
|
|
|
|||
и перейдем к системе |
|
|
|
|
|
|
|
|
|
|
|
α1 = 0, |
|
|
|
|
|
|
|
||
|
+ 2α2 +α3 = 0, |
|
|
|
|
|
||||
α1 |
|
|
|
|
|
|||||
|
+ 3α2 +5α3 = 0. |
|
|
|
|
|
||||
α1 |
|
|
|
|
|
|||||
Полученная система, является однородной.
Как известно, однородная система имеет единственное решение, при-
47

чем нулевое, тогда и только тогда, когда ее определитель не равен нулю. Вычислим определитель нашей системы:
|
1 |
0 |
0 |
|
|
|
|||
|
1 |
2 |
1 |
= 7 ≠ 0. |
|
1 |
3 |
5 |
|
Следовательно, |
система |
|
имеет |
только |
нулевое |
решение |
|||||
α1 =α2 =α3 = 0 . Это означает, что векторы a , |
|
, |
c |
являются линейно неза- |
|||||||
b |
|||||||||||
висимыми и образуют базис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Найдем координаты вектора d |
= 2e1 − e2 + e3 |
в базисе a , |
b |
, |
c . Как из- |
||||||
вестно, любой вектор единственным образом раскладывается по векторам базиса, т.е.
d = x1a + x2b + x3c .
Запишем полученное выражение в координатной форме в базисе e1 , e2 ,
e3 :
|
2 |
1 |
|
0 |
|
0 |
|
||||
|
|
|
|
|
|
2 |
|
|
1 |
|
, |
|
−1 |
= x1 1 |
+ x2 |
|
+ x3 |
|
|||||
|
1 |
|
|
|
|
3 |
|
|
5 |
|
|
|
|
1 |
|
|
|
|
|
||||
и перейдем к системе
|
x1 |
= 2, |
|
+ 2x2 + x3 = −1, |
|
x1 |
||
|
+ 3x2 +5x3 =1. |
|
x1 |
||
Найдем решение этой системы, подставив x1 = 2 во второе и третье уравнения системы:
2x2 + x3 = −3,3x2 +5x3 = −1.
Отсюда x2 = −2, x3 =1. Следовательно, координаты вектора d в базисе a , b , c будут (2,−2,1) и разложение примет вид d = 2a −2b + c .
48
4.5. Переход к новому базису
В линейном пространстве базис определяется неоднозначно. Пусть {e1, e2 ,..., en }– некоторый базис в n -мерном пространстве, будем называть его старым базисом, а {e1', e2 ',..., en '} – другой (новый) базис. Разложим векторы нового базиса по векторам старого базиса:
e1 ' = p11e1 + p21e2 +... + pn1en , |
|
|
|||||
|
' = p12e1 + p22e2 |
+... + pn2en , |
|
|
|||
e2 |
|
(4.4) |
|||||
|
|
|
|
|
|
|
|
.............................................. |
|
|
|||||
|
' = p1ne1 + p2ne2 |
+... + pnn en . |
|
|
|||
en |
|
|
|||||
Компоненты pij , |
i =1,2,..., n ; j =1,2,..., n |
можно записать в виде квад- |
|||||
ратной матрицы порядка n : |
|
|
|
|
|
|
|
|
p11 |
p12 |
K |
p1n |
|
||
|
|
|
p22 |
|
|
|
|
|
p21 |
K p2n |
|
||||
|
P = |
M |
M |
O |
M |
. |
|
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
pn1 |
pn2 K pnn |
|
||||
Матрица P называется матрицей перехода от старого базиса к новому.
Столбцы матрицы – это координатные столбцы векторов e1', e2 ',..., en ' в базисе e1, e2 ,..., en . Так как векторы e1', e2 ',..., en ' линейно независимы, то столбцы матрицы P будут также линейно независимыми. Следовательно, определитель матрицы P не равен нулю (det P ≠ 0 ) и матрица является невырожденной.
Можно показать, что любая невырожденная матрица может служить матрицей перехода к новому базису. [2, гл.6, §1, с.196]
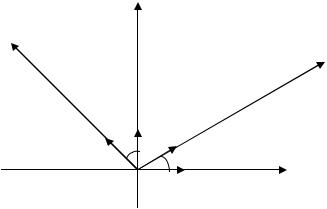
Пример. Пусть i , j – единичные векторы, направленные по осям прямоугольной декартовой системы координат. Повернем оси координат на угол α против часовой стрелки, и пусть i ', j' – новые базисные векторы (рис.3).
Разложим векторы нового базиса по векторам старого базиса, получим
i ' = cosα i +sinα j,j' = −sinα i + cosα j.
49
Y
Y′ |
|
|
|
|
|
|
X′ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
j |
|
|
|||
|
|
|
i |
' |
|
||||
|
j' |
α |
|||||||
|
|
|
|
|
|
|
|||
|
|
|
0 |
|
|
|
|
|
X |
|
|
|
|
|
|
i |
|||
Рис. 3. Поворот системы координат на угол α
Выпишем матрицу перехода
|
cosα |
−sinα |
P = |
sinα |
cosα . |
Отметим, что матрица перехода является невырожденной, так как
det P = |
|
cosα |
−sinα |
|
|
=1. |
|||
|
|
sinα |
cosα |
|
4.6.Преобразование координат векторов при переходе
кновому базису
Найдем связь между координатами вектора в разных базисах. Будем считать, что связь между базисами известна, т.е. задана матрица перехода P . Разложим вектор x по старому и новому базисам соответственно:
x =α1e1 +α2e2 +... +αnen ,
x =α1' e1'+α2 ' e2 '+... +αn ' en ' .
Подставив соотношения (4.4) в последнее выражение, получим
50