

Методическое пособие 816
.pdf
|
|
T |
|
T |
|
|
|
|
Э = ∫ψ 0 (t)dt −∫ψi |
(t)dt , |
(3.4) |
||
|
|
0 |
|
0 |
|
|
m |
|
H H |
H |
|
|
|
где ψ0 (t)= ∑fg |
|
|
||||
X1t , X 2t |
,..X nt , |
|
|
|||
g−1 |
|
|
|
|
|
|
m |
|
|
|
|
|
|
ψ i (t ) = ∑ f g X 1t , X 2 t |
,.. X nt ; |
|
|
|||
g −1 |
|
|
|
|
|
|
X1t , X 2t , ...X nt |
|
- текущие оптимизируемые параметры режима; |
||||
H H H
X1t , X 2t ,..X nt - текущие параметры исходного режима;
Т- продолжительность времени работы, ч/год;
m - число рассматриваемых энергоэкономических характеристик за год.
В частных случаях текущие параметры исходного режима равны базовым значениям энергоэкономических характеристик.
Так как параметры исходного режима известны, то первый
член выражения (3.4) характеризует исходные затраты |
З0 , |
|
зависящие от параметров режима: |
|
|
T |
(t)dt . |
|
З0 = ∫ψ 0 |
(3.5) |
|
0 |
|
|
Вторая составляющая (3.4) определяет функцию затрат |
||
(целевую функцию), зависящую от параметров режима: |
|
|
T |
(t)dt . |
|
ЗΣ = ∫ψ i |
(3.6) |
|
0 |
|
|
С учетом этого формула (3.4) примет вид Э = З 0 − З Σ
По своей сути целевая функция - функция издержек, зависящих от структуры и мощности компенсирующих и регулирующих средств в типовом узле нагрузки с учетом энергоэкономических характеристик отдельных электрических подсистем при пренебрежении зависимостью суммы активных потерь от напряжения.
51
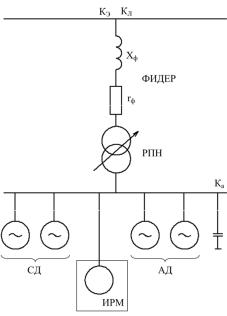
Типовая схема электрической системы представлена на рис.
3.1.
Рис. 3.1. Типовая схема узла нагрузки
Целевая функция имеет вид [63 - 66]:
52
ЗΣ = ∑k (Ai µim + Bi µim )Xi + ∑k (Ci µim + Di µim )Zi + KЭQφm
i=1 |
i=1 |
k
+ ∑(∆Pci Xi + ∆PaiYi )a +ϕ(KUm )+ ЗkaQkm + i=1
k
+(Eн + Ea + Eэ ) ∑(Kci Xi + KaiYi )+ i=1
+Зрс + Зрв + Зрк + Зрпн + Злр +ψ (rφ )+
p |
k |
k |
)Zi + KэQфg |
+ ∑( ∑(Ai µig + Bi µig |
)Xi + ∑(Ci µig2 + Di µig |
||
g=1 |
i=1 |
i=1 |
|
k
+ ∑(∆Pci Xi + ∆PaiYi )b +f (KU )g ) tg i=1
+ ∆PkQkm +
+ ∆Pk Qkg + +
(3.7)
где А, В - составляющие потерь синхронного двигателя (СД), пропорциональные току и первой степени реактивной мощности, кВт;
= Qc /Qcн - относительное значение реактивной мощности СД;
Xi - число СД в группе с числом однотипных механизмов при общем числе группы, равном К с нерегулируемой скоростью;
Yi - то же, но асинхронных двигателей;
С, D – составляющие потерь компенсационного выпрямителя, пропорциональные току и первой степени реактивной мощности, кВт;
Zi – число вентильных преобразователей;
U H – номинальное напряжение в узле нагрузки, кВ;
Qфm – мощность, потребляемая узлом нагрузки в часы максимума, кВАр;
Kэ – удельный прирост активных потерь на выработку реактивной мощности в центре питания, кВт/кВАр;
∆PK – удельные потери в конденсаторе, кВт/кВАр;
QK – мощность конденсаторной батареи, кВАр;
53
∆PC – потери в синхронном двигателе в рассматриваемом нагрузочном режиме без учета потерь, зависящих от реактивной мощности, кВт;
∆PA – потери в асинхронном двигателе в рассматриваемом нагрузочном режиме, кВт;
a – постоянная составляющая стоимости электроэнергии, р./кВт.год;
Eн + Eа + Eэ – сумма нормативного коэффициента окупаемости капиталовложений и коэффициентов отчислений от капиталовложений на амортизацию и эксплуатационные расходы;
Кс , Ка , Кпр – соответственно стоимости СД и АД, р.;
ϕ(KUm )g – составляющая издержек, зависящих от уровня
напряжения KUm , обусловленная постоянной составляющей стоимости потерь электроэнергии, р./год;
b – топливная составляющая стоимости потерь электроэнергии, руб./кВт.ч;
f (KUg )g – переменная составляющая издержек, зависящих от уровня напряжения, р./ч;
tg – продолжительность нагрузки q-той ступени графика при общем числе ступеней p.ч/год;
ЗКА – постоянная составляющая расчетных затрат на конденсаторы, р./кВАр;
ЗРВ – затраты на регулирование возбуждения СД, р./год;
ЗРС – затраты на регулирование конденсаторов, р./год; ЗРПН – затраты на РПН, р./год;
Злр – затраты на локальные регуляторы, р./год;
ψ(rф ) – издержки, связанные с недоиспользованием пропускной
способности системы электроснабжения, р./год.
Входящие в уравнение (3.7) переменные находятся во взаимной связи, определяемой уравнениями вида:
k |
k |
|
Qφg + Qkg + ∑αigQснi Xi |
− ∑aанiYi = 0 ; |
(3.8) |
i=1 |
i=1 |
|
54
|
|
|
|
Pφg rφ + Qφg Xφ |
+ KUg KUpg − KUЦ |
= 0 ; |
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
UH2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑ |
|
|
|
P2 |
+ Q2 |
|
|
|
|
|
|
|
|
Q |
|
= Q′ |
K |
|
+ K 2 |
|
∆Q |
|
+ |
φg |
φg |
|
X |
|
10−3 |
= 0 |
(3.9) |
|||
|
|
|
|
|
Uн2 |
|
φ |
||||||||||||||
|
|
ag |
|
ag |
|
Ug |
Ug |
|
|
xx |
|
|
|
|
|
|
|
||||
|
|
|
|
|
ni − Xi −Yi = 0; aig = f (Зpc ); |
|
|
|
|
||||||||||||
|
|
|
|
|
Qkg |
= f (Зpk ); |
KUpg = f (Зpk ); |
|
|
|
|
||||||||||
|
|
|
|
|
ψ (rφ )= f (Qφm ); |
rφ = f (Cx ); |
|
|
|
|
|
|
|||||||||
|
|
|
|
ϕ(KUm ) = ϕ(Злр ); f (KU ) = f (Зрп ). |
|
|
|
|
|||||||||||||
где Q′ |
– реактивная |
нагрузка |
на |
g ступени |
графика |
без |
учета |
||||||||||||||
ag |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рассматриваемых электроприводов, кВАр; |
|
|
|
|
|
|
|
||||||||||||||
KUЦ – уровень напряжения в центре питания; |
|
|
|
|
|||||||||||||||||
KUp – коэффициент трансформации напряжения РПН, о.е.; |
|
||||||||||||||||||||
Pφg |
– активная нагрузка узла на q ступени, кВт; |
|
|
|
|
||||||||||||||||
Xφ |
– |
приведенное |
к |
напряжению |
узла |
индуктивное |
|||||||||||||||
сопротивление фидера, Ом;
Qанi – суммарная реактивная нагрузка асинхронного двигателя i– го механизма в рассматриваемом режиме, кВАр;
∑∆Qxx – суммарная реактивная мощность холостого хода
трансформаторов питающей сети (от ЦП до узла нагрузки), кВАр. Кроме того, на переменные накладываются следующие
ограничения:
imin ≤ ig ≤ imax ; |
Qφg |
≤ Qφ max; |
KU min ≤ KUg ≤ KU ; |
0 ≤ Qkg ; |
|
|
|
(3.10) |
Qφm ≤ Qφ′max ; Xi ≥ 0; |
Yi |
≥ 0 , |
где imin – минимально допустимое |
относительное значение |
|
реактивной мощности СД из условия нагрева и устойчивости работы;
55
imax – максимально допустимое относительное значение реактивной мощности из условий нагрева;
Qφmax – максимально допустимое значение реактивной мощности фидера из условия перегрузки, кВАр;
KU min ,KU max – минимально и максимально допустимое значение уровней напряжения в узле нагрузки;
Qφ′max – ограничение по реактивной мощности в часы
максимума в энергосистеме, кВАр.
В дальнейшем, при использовании этой методики для определения оптимального управления режимами узлов нагрузки, многие параметры сети и типовых нагрузок будут задаваться как постоянные, а параметры средств, на основе статических устройств, регулирования напряжения (тиристорные регуляторы напряжения ТРН) и реактивной мощности (тиристорные конденсаторные установки ТКУ) будут варьироваться.
Из анализа приведенных выше формул следует вывод, что в общем случае минимизация функции затрат (3.7) с учетом уравнений (3.8), (3.9) и ограничений (3.10) требуют применения сложных методов нелинейного математического программирования.
Таким образом, математической задачей оптимизации управления режимами узлов нагрузки является поддержание множества параметров во времени такими, чтобы обеспечить минимум целевой функции затрат (3.6) или максимум экономического эффекта (3.4) при соблюдении взаимной связи между параметрами (3.8) и ограничений (3.10).
При проведении оптимизационных расчетов часть необходимых исходных данных имеет относительно невысокую степень точности (величины нагрузок и напряжений, стоимостные показатели отдельных элементов, а в некоторых случаях и параметры сетей).
Вусловиях эксплуатации большая часть, как параметров систем электроснабжения, так и параметров режимов может быть измерена непосредственно или косвенными методами. Другая часть параметров может быть принята по данным каталогов.
Вобщем случае погрешность при определении экономического эффекта от оптимизации режима системы электроэнергетики должна определяться по правилам приближенных
56
вычислений, в лучшем случае - с применением методов ИНС и ННС, о чем говорилось выше.
При этом, точность определения и поддержания оптимизируемого параметра режима системы должна быть таковой, чтобы при ее допускаемых отклонениях (погрешностях) величина экономического эффекта от оптимизации не снижалась более чем на погрешность ∆З, обусловленную неточностью исходных данных.
Оптимизацию режимов электропотребления можно разделить на три группы:
1.Количественная оптимизация, при которой имеет место существенное изменение размеров потребления электроэнергии. Сюда можно отнести выбор рациональных мощностей электроприводов, выбор рациональных средних токов электротехнологических процессов, замену малоэкономичных устройств более экономичными и т. п. Это направление можно назвать также оптимизацией управления отдельными потребителями электроэнергии.
2.Качественная оптимизация, при которой имеет место существенное улучшение показателей качества электроэнергии при незначительных изменениях размеров электропотребления. Применительно к узлам нагрузки обычного типа сюда следует отнести оптимизацию такого параметра режима электропотребления, как напряжение, а также связанное с напряжением перераспределение реактивных мощностей. Это направление (оптимизация управления напряжением и реактивной мощностью) и будет рассмотрена далее.
3.Временная оптимизация, т. е. изменения электропотребления во времени суток без существенного изменения суммарного электропотребления. Это направление можно назвать оптимизацией графиков электропотребления.
Очевидно, что комплексная система управления статическими регуляторами напряжения и реактивной мощности должна решать задачу качественной оптимизации. Следовательно, можно выделить два основных взаимосвязанных параметра оптимизации: напряжение и реактивную мощность.
Учитывая, что большинство объектов, входящих в узлы нагрузки, оплачивает фактически потребляемую реактивную мощность, то первая составляющая целевой функции приведенных
57

затрат представляет собой стоимость фактически потребляемой реактивной мощности:
ЗQ = ЦQQ , |
(3.11) |
где ЗQ - приведенные затраты;
Q- реактивная мощность;
ЦQ - цена 1 кВАр .ч.
Далее рассмотрим зависимость приведенных затрат от величины напряжения для основных потребителей электрической энергии в узлах нагрузки – асинхронных и синхронных двигателей, в соответствии с данными [67-71].
Так, зависимость приведенных затрат для асинхронных двигателей от величины напряжения определяется по выражению
З0 = ЦР (∆РАД + ∆РСД + ∆РОСВ + ∆РТО ) |
(3.12) |
где ∆РАД - потери в асинхронных двигателях в зависимости от
величины питающего напряжения; ∆РСД - потери в синхронных двигателях в зависимости от
питающего напряжения; ∆РОСВ- потери в системе освещения в зависимости от
питающего напряжения; ∆РТО - потери в технологическом оборудовании в зависимости от
питающего напряжения.
Потери в роторе ∆Р2 , статоре ∆Р1 и стали ∆Рс асинхронного двигателя равны:
∆P2 = ∆P2H β |
|
|
b |
+ b2 |
−1 |
|
|
|
|
|||
|
|
H |
|
H |
|
|
|
|
|
; |
(3.13) |
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
/ β + (b K |
2 |
/ β)2 |
|
||||||||
|
b K |
−1 |
|
|||||||||
|
H |
U |
|
|
H |
|
U |
|
|
|
|
|
∆P = ∆P |
K |
−2 |
(β 2 cos2 |
ϕ |
НОМ |
+ µ2 sin2 ϕ |
НОМ |
) ; |
(3.14) |
|
1 |
1H |
|
U |
|
|
|
|
|
||
58

|
∆P = ∆P |
K2 , |
(3.15) |
|
|
С |
CH |
U |
|
где ∆P2H , ∆P1H , ∆PСH соответственно номинальные значения |
||||
потерь в роторе, статоре и стали; |
|
|
|
|
β = Р/ РН |
– относительная нагрузка двигателя по активной |
|||
мощности; |
|
|
|
|
bН = Mmax / M Н – перегрузочная способность двигателя; |
||||
kU =U /UН |
– относительное значение напряжения двигателя; |
|||
µ = Q/QН |
– относительное |
значение |
реактивной мощности |
|
двигателя; |
|
|
|
|
cosϕном – номинальное значение коэффициента мощности
двигателя.
Суммарные потери активной мощности в асинхронном двигателе в зависимости от напряжения на его зажимах определяются как сумма трех составляющих
∆PАД = ∆P1 + ∆P2 + ∆PC . |
( 3.16) |
Относительное значение реактивной мощности асинхронного двигателя с учетом квадратичной аппроксимации характеристики холостого хода может быть определено по формуле:
|
|
|
ctgϕHOM |
|
|
|
|
|
|
|
|
|||
µ = 1− |
[2(K |
|
−0.55) +0.6] K |
|
+ |
|
||||||||
|
|
|
|
U |
U |
|
||||||||
|
|
|
|
+ b2 −1 |
|
|
|
|
|
|
||||
|
|
b |
|
|
|
|
|
|
|
|||||
|
|
|
H |
|
|
H |
|
|
|
|
|
|
. |
(3.17) |
|
|
|
|
βctgϕHOM |
|
|
|
|
|
|||||
+ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b K |
2 |
/ β + (b K |
2 |
/ β)2 |
−1 |
|
|
|
||||||
|
|
|
|
|||||||||||
|
H |
U |
|
|
|
H |
U |
|
|
|
|
|
|
|
Для примера, на рис. 3.2, 3.3 представлены соответственно зависимости потерь реактивной мощности асинхронного двигателя серии 4А от напряжения и степени загрузки.
Потери в обмотке статора синхронного двигателя в зависимости от величины питающего напряжения определяются по (3.4). Реактивная мощность синхронного двигателя в зависимости от напряжения может быть определена в соответствии с (3.18).
59
P = P |
K |
−2 |
(α2 sin2 |
ϕ |
HOM |
+ β2 cos2 ϕ |
HOM |
)X |
2 |
+2X |
d |
sinϕ |
HOM |
+ K2 |
|
|||||
U |
|
|
|
|
|
|
|
d |
|
|
|
U |
(3.18) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
B BH |
|
|
|
|
1+ 2X |
|
sinϕ |
|
|
+ X |
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
d |
HOM |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|||
Потери в стали синхронного двигателя в зависимости от напряжения с учетом реактивной мощности СД определяются как:
|
K−2 |
(α2 sin2 |
ϕ |
+β2 cos2 ϕ |
)X |
2 |
+2X sinϕ |
+K2 |
|||||
∆P =∆P |
U |
|
HOM |
|
|
|
HOM |
δ |
δ |
HOM |
U |
. (3.19) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С CH |
|
|
X |
2 |
+2X |
sinϕ |
|
+1 |
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
δ |
δ |
|
HOM |
|
|
|
|
|
где Xδ - относительное сопротивление рассеяния.
60