

Аппаратно-программное управление режимами узлов нагрузки региональных сетей электроснабжения с помощью статических устройств. Крысанов В.Н
.pdfРис. 5.16. Функциональная схема математической модели
ПЧ-АД
Рис. 5.17. Функциональная схема математической модели системы ПЧ–АД совместно с ИНС–регулятором
Для рассмотрения влияния ИНС на характеристики динамических режимов была применена схема следующая схема модели (рис. 5.17). При этом блок Plant представляет собой математическую модель ПЧ–АД (рис. 5.16), а выходом «y» может являться любая из интересующих характеристик. Так, при
201
проведении моделирования различных динамических режимов были исследованы показатели таких характеристик, как скорость выходного вала и токи фаз статора АД.
Внутренняя структура ИНС–регулятора построена в соответствии с рис.1. Идентификация подсистемы Plant характеризуется следующими параметрами: количество задействованных нейронов – 10; количество элементов запаздывания на входе и выходе модели – 2; длина обучающей выборки – 10000; максимальный период идентификации – 0,005 с; количество циклов обучения – 300.Модель формирования управляющего воздействия имеет следующие показатели: количество задействованных нейронов – 13; количество элементов запаздывания на входе – 2; количество элементов запаздывания на выходе – 1; длина обучающей выборки – 100; максимальный период идентификации – 0,0005 с; количество циклов обучения – 200(параметры модели: АД–37 кВт, 380 В, 50 Гц; основная нагрузка –20 Нм; 1 дополнительная ступень нагрузки– 10 Нм; 2 дополнительная ступень нагрузки– 5 Нм. В пункте а) w(задания)=150 [рад/с]; в пункте б) w(задания пуска)=150 [рад/с], w(задания торможения)=0 [рад/с]; в пункте в) время наброса 1 дополнительной нагрузки – 3 с, 2 дополнительной нагрузки–5 с(оба совместно с w(задания пуска)=150 [рад/с]), в t3=7с производиться торможение под нагрузкой до t4=9с (совместно с w(задания торможения)=0 [рад/с]), после чего производиться сброс дополнительных нагрузок (совместно с w(задания пуска)=150 [рад/с])).
Рассмотрим несколько типовых режимов.
А) Пуск в системе ПЧ–АД с фиксированной нагрузкой на
валу
202

а
Б
Рис. 5.18. Пуск в системе: а – ПЧ–АД - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу); б – ИНС–ПЧ–АД (оптимизация по скорости) – скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу); в - ИНС–ПЧ–АД (оптимизация по току статора) - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу).
203

в
Рис. 5.18. Пуск в системе: а – ПЧ–АД - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу); б – ИНС–ПЧ–АД (оптимизация по скорости) – скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу); в - ИНС–ПЧ–АД (оптимизация по току статора) - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу). Продолжение.
Б) Торможение в системе ПЧ–АД с фиксированной нагрузкой
на валу
204

Рис. 5.19. Торможение в системе: а – ПЧ–АД - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу); б – ИНС–ПЧ–АД (оптимизация по скорости) - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу);в – ИНС–ПЧ–АД (оптимизация по току статора)- скорость выходного вала [рад/с]
(вверху), токи статор [A] (внизу)
205

В) Режим переменной нагрузки в сочетании с режимами торможения
Рис. 5.20. Переменная нагрузка в сочетании с режимами торможения в системе: а – ПЧ–АД - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу); б – ИНС–ПЧ–АД (оптимизация по скорости)
-скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу); в
–ИНС–ПЧ–АД (оптимизация по току статора) - скорость выходного вала [рад/с] (вверху), токи статор [A] (внизу)
206
Анализируя результаты моделирования (рис. 5.18 - 5.20), можно отметить, что при формировании оптимизации системы ИНС–ПЧ–АД по скорости получены хорошие результаты по основным показателям качества переходного процесса: снижение величин перерегулирования, колебательности и времени переходного процесса от 7 до 12 % в различных динамических режимах.
Но показатели токов фаз статора АД завышены (порядка 5 % в сравнении с системой ПЧ–АД– по средствам интегральной оценки [131]), что может привести к дополнительным потерям во всех динамических режимах и к ухудшению характеристики скорости по основным показателям (на 5% в различных динамических режимах в сравнении со случаем формирования оптимизации системы ИНС– ПЧ–АД по скорости. В тоже время токи статора уменьшаются (около 10 % в сравнении с системой ПЧ–АД– по средствам интегральной оценки [131, 132]).
Дополнительно хотелось бы отметить, что на ряду с ПЧ, на аппаратном уровне наиболее распространёнными решениями вопроса энерго – и ресурсосбережения и в производственном секторе и в сфере ЖКХ, являются устройства плавного пуска (УПП).
УПП позволяют добиться уменьшения расхода энергии за счёт снижения пусковых токов и, механических ударных нагрузок со стороны электродвигателя в пусковых режимах. УПП является регулятором напряжения, плавность пуска асинхронного электродвигателя (АД) в котором достигается за счет регулирования напряжения, подаваемого на АД, по алгоритмам, предусмотренным в настройках УПП.
Стоимость УПП значительно ниже, чем ПЧ для электромашин одинаковой мощности. Однако, в пусковых режимах эффект от применения УПП близок к эффекту от применения ПЧ.
По аналогии с вариантом использования ПЧ в автоматизированных ЭП, дним из перспективных алгоритмических решений задачи энерго– и ресурсосбережения для насосных и вентиляторных ЭП является применение метода эмулирования искусственных нейросетевых систем (ИНС) с последующим созданием на их базе эффективных СУ УПП.
Действительно, для типового ЭП (УПП-АД) насоса подкачки воды мощностью 55 кВт, можно определить экономию
207
электроэнергии на уровне 9,27 кВтч (при среднем числе пусков – 18
всмену).
Сучётом графика работы цеха (230 рабочих дней в году), а также тарифе на электрическую энергию 3,0 руб./ кВтч, получим экономический эффект от применения СУ с УПП в размере 17056 кВтч/год или 51170,4 руб./год.
Кроме того, стоит отметить, что значительный вклад (в рамках данной работы не рассматривается) в общий экономический эффект от применения УПП состоит в значительном повышении ресурса работы технологического оборудования (АД, всей гидравлической системы ХВС) и снижение затрат на профилактику, ремонт и замену данного оборудования.
При этом, стоимость станции управления на базе УПП составляет 108 000 руб (УПП на 55 кВт серии CSXi “AuCom”; пускорегулирующая аппаратура “OMRON” и “Schneider Electric”; счетчики электрической мощности и моточасов; прочие элементы).
Таким образом, срок окупаемости от внедрения станций с УПП составляет:
Т |
|
= |
108000 |
= |
|
108000 |
=1,02года |
|
ок |
(54600+ 51170,4) |
105770,4 |
||||||
|
|
|
|
|||||
При применении в качестве верхнего уровня СУ микроконтроллера с эмуляцией ИНС
дает дополнительный экономический эффект около 10 % по сравнению с системой УПП – АД без ИНС (при увеличении капиталовложений в модернизацию не более чем на 2,5 % от базовой суммы расходов на станцию УПП) [119].
Учитывая, что на больших предприятиях (например, ОАО «КБХА» г. Воронеж), насосы подкачки воды работают в составе целой группы, то оптимальной будет модернизация всей СУ такой группы с использованием, например, микроконтроллера DVP20EX200R производства фирмы Delta Electronics (оптимальный по критерию «цена-качество»). Этот микроконтроллер даёт возможность создать эмуляцию ИНС, т.к. его параметры позволяют реализовать необходимые входы и выходы сети, связь между моделями нейронов (сумматорами в сочетании с маркерами). Наличие констант, счётчиков и таймеров позволяет создавать различные функции возбуждения как отдельных моделей нейронов,
208
так и всей сети в целом. Применение имеющихся регистров позволяет воплотить принцип идентификации и последующего преобразования данных эмулированной ИНС.
Два микроконтроллера DVP20EX200R совместно с модулем расширения аналоговых выходов (DVP04DA), а также модулями расширения дискретных входов/выходов (DVP16XM211N и DVP24XN200R) позволяет производить регулирование группы насосов подкачки (12 насосов по системе УПП – АД). Кроме этого в систему входят 6 датчиков давления DPA, периферийная, коммутационная и сигнальная аппаратура.
Общая стоимость данного оборудования составит 41500 руб. (2 DVP20EX200R – 8000 руб.; DVP04DA – 6000 руб.; DVP16XM211N – 3000 руб.; DVP24XN200R – 4500 руб.; DPA – 2000 руб.).
С учётом этого, затраты на систему ИНС – УПП – АД составляет 111460 руб.
В этом случае, за счёт оптимизации алгоритма управления становится возможным получение экономического эффекта – 116 347,4 руб./год (рис. 5.21, 5.22).
Срок окупаемости составляет:
111460 Ток(ИНС−УПП−АД) = 116347,4 = 0,95 года
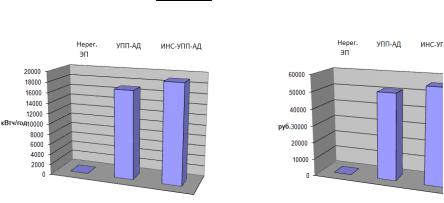
а |
б |
Рис. 5.21. а – экономия электроэнергии (кВтч/год); б – экономия энергии (руб.) при тарифе 3руб./кВтч
209

Рис. 5.22. Затраты на создание СУ и положительный экономический эффект от их применения (в верху система ИНС-УПП-АД, в низу - УПП-АД)
5.2.3. Программные средства управления режимом работы автоматизированных ЦТП с использованием ННС.
Переходя от рассмотрения отдельных потребителей электроэнергии к целым объектам (совокупность распределенных электрических нагрузок), следует отметить еще большую целесообразность применения ННС для них. Для примера рассмотрим центральные тепловые пункты (ЦТП) крупных городов. Исходя из анализа данных по ЦТП Самары, Воронежа, Белгорода [134, 135] можно сделать вывод о следующих проблемных местах рассматриваемого класса объектов, не имеющих автоматизированные СУ:
–применение технически прогрессивных технологий;
–переход от неуправляемого и недостаточно энергоэффективного ЭП к современному оборудованию на основе устройств плавного пуска и ПЧ;
–создание автоматизированных СУ;
–повышение требований к вопросам диспечеризации, контроля состояния трубопровода, системам предупреждения и устранения аварийных ситуаций.
Проблемы эффективного функционирования ЦТП, являются достаточно сложно формализуемыми, с точки зрения точного математического описания систем объектов. Можно выделить 3 основных подсистемы моделирования, представленные на рис. 5.22., из анализа которых становится ясно следующее:
210