

Методическое пособие 816
.pdfтакже вести себя как активные фильтры. Разумеется, за дополнительную функциональность компенсаторов STATCOM приходится и дополнительно платить.
Среди множества функций этих компенсаторов классическими являются следующие:
•регулирование напряжения путем поглощения или возврата реактивной мощности;
•подавление подсинхронных колебаний.
При снижении напряжения SVC ведет себя как конденсатор, и реактивная мощность падает пропорционально квадрату напряжения. Система STATCOM в такой же ситуации переходит в режим постоянного источника тока. Напряжение на выводах конденсатора может поддерживаться постоянным.
Рис. 4.31. Схема STATCOM
141

Продольная компенсация – SSSC (Static Synchronous Series Compensator – Статический синхронный продольный
компенсатор)
Вэтих системах удается исключить недостаток систем TCSC (конденсаторная батарея с тиристорным управлением), состоящий в невозможности плавного перехода от емкостного режима к индуктивному.
SSSC (рис. 4.32) может возвращать только реактивную мощность, за исключением случаев, когда контур постоянного тока получает подпитку от накопителя энергии.
Враспределении энергии используется этот же принцип, который получил название DVR (Dynamic Voltage Restorer – система динамического восстановления напряжения), хотя по функциональности они несколько отличаются. Здесь целью является поддержка сети в отношении ее наиболее уязвимых потребителей при кратковременных возмущениях. Мощность имеющихся на рынке установок DVR не превышает 1 МВА.
Рис. 4.32. Схема SSSC
142
Универсальная компенсация – UPFC (Unified Power Flow Controller – Унифицированная система управления
энергопотоками)
Мощности систем STATCOM и других типов SSSC настолько высоки, что использование их без применения накопителей энергии достаточной емкости затруднительно. Если такая возможность отсутствует, мы должны быть в состоянии управлять величиной транспортного угла, как в случае использования фазосдвигающего трансформатора, но со значительно более высоким быстродействием. Система UPFC воплощает эту мечту в реальность без использования какого-либо накопителя энергии. Система UPFC представляет собой не что иное, как объединение систем STATCOM и SSSC (рис. 4.33). Это наиболее сложная из систем FACTS. Она позволяет осуществлять следующие функции:
•непосредственное управление напряжением. Сложение или вычитание напряжений, фазированных узлом поперечной компенсации. Эти действия производятся над реактивной мощностью;
•поперечный компенсатор – путем управления поперечным преобразователем с переводом последнего в режим поглощения или возврата реактивной мощности. Напряжение должно поддерживаться постоянным;
•продольный компенсатор: путем добавления последовательного напряжения, со сдвигом на 90o по отношению к току связи. При этом необходимо управлять выходным напряжением
иреактивной мощностью на выходе;
•фазосдвигающее устройство: если величина и фаза продольного напряжения таковы, что при поддержании такого же напряжения на выходе модуля оно уменьшает величину сдвига фаз по отношению ко входу. Это имеет важное значение при управлении передаваемой активной мощностью.
Или, наконец, одновременное использование всех функций – число степеней свободы системы позволяет это делать, – когда необходимо управлять и реактивной, и активной мощностью.
Преимущества системы UPFC очевидны. Хотя в настоящее время система не особенно распространена, в ближайшие годы эта технология будет активно развиваться, в узлах нагрузки городов, где
143

особенно сложно осуществить строительство дополнительных линий.
Рис. 4.33. Схема UPFC
4.2.2. Автоматизированные аппаратные средства регулирования реактивной мощности в узлах нагрузки
распределительных сетей
Учитывая положения, отмеченные в 3 глава, можно сделать вывод о том, что для оптимизации процесса энергопотребления потребителя, необходимо искусственно изменять поток реактивной мощности, чтобы выполнялись требования ГОСТ на качество электроэнергии.
Приведенные соображения вынуждают, насколько это технически и экономически целесообразно, приближать источники компенсации реактивной мощности к местам ее потребления в сети. Это разгружает в значительной степени питающие линии электропередач и трансформаторы от реактивной мощности. Следовательно, устройства компенсации реактивной мощности должны устанавливаться как непосредственно в распределительных сетях уровня 110-35 кВ, но и в узлах нагрузки (6-10 кВ) и непосредственно у потребителей на напряжении 0,4 кВ.
В сетях этих уровней напряжения, в настоящее время основным средством компенсации реактивной мощности являются батареи силовых конденсаторов, подключаемые параллельно к
144
электросети (поперечная компенсация). Достоинствами конденсаторных установок являются: простота, относительно невысокая стоимость, недефицитность материалов, малые удельные собственные потери активной мощности.
Конденсаторы являются наиболее экономичным источником реактивной мощности, так как имеют наименьшие потери по сравнению с другими источниками.
Недостатки: отсутствие плавного автоматического регулирования отдаваемой в сеть реактивной мощности, пожарная опасность, наличие остаточного заряда.
Проведенные в последние годы (это обусловлено, в основном, появлением огромного числа вентильных преобразователей переменного тока в постоянный ток и переменный ток) исследования выявили ряд дополнительных явлений, неблагоприятно влияющих на работоспособность конденсаторных установок [72]:
-наличие в их цепях высших гармоник из-за применения управляемых выпрямителей;
-коммутационные перенапряжения, возникающие при нормальных и аварийных коммутациях включения и отключения;
-феррорезонансные перенапряжения, обусловленные насыщением магнитопроводов силовых трансформаторов и трансформаторов напряжения при наличии параллельно включенной емкости;
-перенапряжения, сопровождающие процесс дугового замыкания на землю (дуговые перенапряжения)
Указанные недостатки существенно снижают надежность конденсаторных установок.
Наибольший эффект снижения потерь активной энергии может быть достигнут при совмещении в отдельных установках генерации реактивной мощности и решении технологических задач. К числу таких установок в первую очередь относятся приводные синхронные двигатели, способные генерировать реактивную мощность емкостного характера в режиме перевозбуждения в определенных пределах.
Действительно, на современных промышленных предприятиях применяются синхронные электродвигатели мощностью от сотен до 20 тыс. кВт. Оснащение этих машин устройствами АРВ обеспечивает повышение устойчивости работы как самих электродвигателей, так и узлов нагрузки в целом [103].
145
Для создания запаса устойчивости какого-либо узла нагрузки, необходимого для нормальной работы системы электроснабжения в аварийных (при КЗ) и в других режимах, возбуждение двигателей следует форсировать. Однако длительно режим форсировки неприемлем из-за больших потерь активной мощности в цепях возбуждения, обмотках двигателя и недопустимого их перегрева. Поставленную задачу наилучшим образом и решают устройства АРВ(автоматические регуляторы возбуждения).
При построении устройств АРВ синхронных электродвигателей используются основные законы регулирования:
1. Постоянство напряжения сети (данного узла нагрузки) Uc =
const.
2.Постоянство коэффициента реактивной мощности двигателя tg д = const.
3.Постоянство отдаваемой двигателем реактивной мощности
Qд = const.
4.Минимум колебаний напряжения сети (при пульсирующей нагрузке).
5.Минимум потерь активной мощности в сети.
6.Минимум потерь активной мощности в двигателе. Регулирование по закону Uc = const применяется тогда, когда
суммарная мощность синхронных двигателей составляет более 30...40 % мощности подстанции, т.е. когда двигатели могут определять уровень напряжения данного узла нагрузки.
Регулирование по закону tg д = const может применяться в случае медленно меняющейся нагрузки двигателя. Поскольку отношение tg д = Q /P должно быть постоянным, то при быстро меняющейся активной мощности реактивная мощность должна изменяться быстро, что может привести к значительным колебаниям напряжения в питающей сети.
Регулирование по закону Qд = const целесообразно применять при быстро меняющейся нагрузке, что позволит снизить колебания напряжения в сети. Минимум колебаний напряжения в сети может быть обеспечен при постоянстве реактивной нагрузки на питающий трансформатор.
Минимум потерь активной мощности в синхронном двигателе достигается при поддержании его коэффициента мощности cos д равным 1.
146

Регулирование по условию минимума потерь активной мощности в сети связано с оптимальным распределением реактивной мощности, генерируемой отдельными ее источниками, является в общем случае достаточно сложной задачей и может быть реализовано на основе применения микропроцессоров или миниЭВМ.
Для синхронных электродвигателей средней мощности (10...400 кВт), а в некоторых случаях и большей используются упрощенные схемы АРВ (рис. 4.34). Недостаток данного устройства АРВ заключается в том, что трансформаторы тока вносят дополнительные сопротивления в цепь статора синхронной машины и ухудшают ее устойчивость при увеличении нагрузки вследствие понижения напряжения на выводах двигателя.
Рис. 4.34. Схема АРВ синхронного двигателя с силовым трансформатором, трансформаторами тока и дросселями
Отмеченного недостатка не имеет схема АРВ с силовым трансформатором Т и дроссель - трансформаторами ДТ (рис. 4.35,).
147

Рис. 4.35. Схема АРВ синхронного двигателя
Иногда, синхронные двигатели работают исключительно в режиме компенсации РМ и называются синхронными компенсаторами. На синхронных компенсаторах устанавливаются автоматические регуляторы знакопеременного возбуждения. Их основная особенность связана с тем, что синхронный компенсатор может работать как в режиме генерации, так и в режиме потребления реактивной мощности. В связи с этим устройство АРВ должен изменять ток возбуждения в широких пределах, включая изменение его полярности. При этом осуществляется плавное регулирование реактивной мощности синхронного компенсатора.
В отличие от синхронных компенсаторов синхронные электродвигатели потребляют значительную активную мощность, но и как компенсаторы могут не только потреблять, но и генерировать реактивную мощность. На синхронных электродвигателях обязательно предусматриваются устройства АРВ. В общем случае в их задачу входит не только поддержание заданного напряжения на
148
шинах подстанции, но и поддержание заданного коэффициента мощности, плавное регулирование отдаваемой реактивной мощности.
Учитывая существенные недостатки синхронных машин (стоимость, надежность и т.д.) [72], ниже более подробно рассмотрим автоматизированные системы управления батареями статических конденсаторов узлов нагрузки (6-10 кВ).
С помощью таких устройств, типа АРТ и АРКОН обеспечивается поддержка на заданном уровне напряжения в сети – т.е. отрабатываются отклонения напряжения сети.
Особый интерес для АСУЭ представляют статические устройства компенсации реактивной мощности, которые обеспечивают плавное или мелкоступенчатое регулирование реактивной мощности.
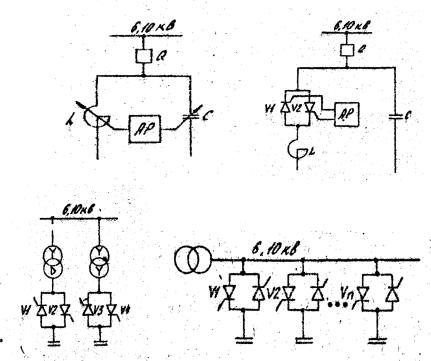
На рис. 4.36,а приведена схема включения под один выключатель Q конденсаторной батареи С и регулируемого реактора L. Ток компенсации, выдаваемый устройством в сеть, определяется разностью токов конденсаторной батареи и управляемого реактора Iк = Iс + IL. Конденсаторная батарея и реактор управляются от автоматического регулятора АР. Плавность регулирования реактивной мощности достигается с помощью реактора L. Однако при его применении в данной схеме необходимо увеличить мощность конденсаторной батареи на величину мощности реактора [104, 105].
149
а |
б |
в |
г |
Рис. 4.36. Схемы управляемых статических источников реактивной мощности
Управляемый статический источник реактивной мощности ИРМ с искусственной коммутацией (рис. 4.36,б) позволяет также плавно регулировать реактивную мощность. Под один выключатель Q включены нерегулируемая конденсаторная батарея С и управляемый реактор L. Регулирование тока, протекающего через этот реактор, осуществляется изменением угла включения тиристоров V1и V2 от автоматического регулятора АР. Данной схеме присущ тот же недостаток, что и предыдущей. Кроме того, ток компенсации Iк в общем случае содержит значительный уровень высших гармоник, выдаваемых в сеть.
Принципиально возможно регулирование мощности конденсаторной батареи С изменением угла включение последовательно соединенной с ней группы тиристоров V1 и V2 (рис. 4.36,в). Следует отметить, что реализация рассматриваемого
150