

Исполнительный привод. учебное пособие. Литвиненко А.М
.pdfА. М. Литвиненко
ИСПОЛНИТЕЛЬНЫЙ ПРИВОД
Учебное пособие
Воронеж 2020
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный технический университет»
А. М. Литвиненко
ИСПОЛНИТЕЛЬНЫЙ ПРИВОД
Учебное пособие
Издание второе, переработанное и дополненное
Воронеж 2020
УДК 681.575(075.8) ББК 32.816я7
Л641
Рецензенты:
кафедра вычислительной техники и информационных систем ВГЛТУ им. Г. Ф. Морозова (зав. кафедрой д-р техн. наук, проф. В. К. Зольников); ген. директор НПФ «Мехпресс» (г. Воронеж), д-р техн. наук В. А. Крук
Литвиненко, А. М.
Исполнительный привод: учеб. пособие / А. М. Литвиненко; ФГБОУ Л641 ВО «Воронежский государственный технический университет». –
2-е изд., перераб. и доп. – Воронеж: Изд-во ВГТУ, 2020. – 124 с.
ISBN 978-5-7731-0844-3
В учебном пособии рассмотрены общие требования к электроприводам роботов, а также электромеханические свойства электродвигателей, вопросы выбора двигателя и передаточного числа редуктора, включая различные теории нагрева (тепловые модели). Уделено внимание электроприводам постоянного
ипеременного тока, линейным и шаговым. Приведены основные сведения по гидравлике, гидравлическим и пневматическим приводам роботов. Также рассмотрены некоторые разработки в области электропривода роботов, включая приводы с внешними магнитными системами и орбитальные.
Издание предназначено для студентов направлений подготовки 27.03.04 «Управление в технических системах» (профиль «Управление и информатика в технических системах»), 13.03.02 «Электроэнергетика и электротехника» (профиль «Электропривод и автоматика»), 27.04.04 «Управление в технических системах» (программа магистерской подготовки «Теория систем управления»)
и13.04.02 (программы магистерской подготовки «Управление распределенными объектами регионального электроснабжения», «Электроприводы и системы управления электроприводов», «Электроэнергетические системы»).
Ил. 125. Табл. 4. Библиогр.: 24 назв.
УДК 681.575(075.8) ББК 32.816я7
Печатается по решению редакционно-издательского совета Воронежского государственного технического университета
ISBN 978-5-7731-0844-3 |
© Литвиненко А. М., 2020 |
|
© ФГБОУ ВО «Воронежский государственный |
|
технический университет», 2020 |
ВВЕДЕНИЕ
Настоящее учебное пособие разработано для студентов направлений подготовки 27.03.04 «Управление в технических системах» (профиль «Управление и информатика в технических системах»), 13.03.02 «Электроэнергетика
иэлектротехника» (профиль «Электропривод и автоматика»), 27.04.04 «Управление в технических системах» (программа магистерской подготовки «Теория систем управления») и 13.04.02 (программы магистерской подготовки «Управление распределенными объектами регионального электроснабжения», «Электроприводы и системы управления электроприводов», «Электроэнергетические системы»).
Учебным планом в той или иной мере предусмотрено изучение основ робототехники при изучении курсов: «Электромеханические системы», «Исполнительные системы в ГАП», «Защита интеллектуальной собственности», «История и современные проблемы теории управления». В ВГТУ данная тема является одной из основных в рабочих программах. Между тем данный материал излишне детализирован в соответствующих пособиях для робототехнических специальностей, кроме того, наблюдается параллелизм при изучении, например, устройств управления в курсах «Основы робототехники»
и«Микропроцессорные системы».
Вданном пособии в концентрированном виде приведены основные сведения об электроприводе роботов, в том числе линейном и шаговом, гидро-
ипневмоприводе, орбитальном электроприводе, о роботах с рекуперацией энергии.
Настоящее издание является частью учебно-методического комплекса по вышеуказанным дисциплинам и является дополненным и переработанным вариантом учебного пособия «Исполнительный привод», выпущенного в рамках серии «Исполнительные системы роботов» (Литвиненко А. М. Исполнительный привод: учеб. пособие / А. М. Литвиненко; Воронеж. гос. техн. ун-т. –
Воронеж: ВГТУ, 1996. – |
139 с. – |
(Исполнительные системы роботов)). |
В пособии использованы |
авторские |
иллюстрации и иллюстрации, взятые |
из других источников литературы в качестве цитирования.
3
ОБЩИЕ ТРЕБОВАНИЯ К ДВИГАТЕЛЯМ ПРОМЫШЛЕННЫХ РОБОТОВ
Совокупность требований к приводу ПР определяется составом и характером манипуляционных операций, а также конструктивно-технологической спецификой ПР.
Количественно манипуляционные движения (привед нные к вращательным) большинства современных ПР при мощности привода 10÷5000 Вт ограничены предельным перемещением выходного звена 2 , максимальной
скоростью выходного перемещения 2 , временем переходных процессов при позиционировании tn , ускорением выходного звена 2 , допустимой ошибкой при позиционировании 2 :
2 (45 330 ); 2 (180 360 ), 1/с; tn (0,1 1)c; 2 (1800 3600 ), 1/с2;2 (0,01 0,05 ).
Диапазон регулирования скорости в транспортно-ориентирующих ПР, как правило, не превышает 500. В сварочных ПР и других роботах с контурным управлением к точности траектории движения и его темпу предъявляются более высокие требования, появляется необходимость в точном задании скорости и повышении диапазона регулирования.
Специфика функционирования привода в роботах при традиционно высоких требованиях к его энергетике и ресурсу определяется следующими факторами:
–необходимостью реализации монотонных (без заметного перерегулирования) перемещений рабочего органа ПР;
–переменным характером статических нагрузок (М2) из-за разнообразия объектов и траекторий манипулирования, а также за сч т неуравновешенности механических систем;
–существенной переменой механической нагрузки, меняющимся динамическим моментом привода в 5–10 раз из-за переменной кинематики подвижных звеньев робота и присоединения дополнительных масс;
–наличием в конструкции ПР кинематический цепей с переменной механической упругостью, возбуждающей дополнительную колебательность движений выходного звена. Для монотонности движения и повышения точности позиционирования необходима компенсация упругих возмущений;
–особенностями компоновки силовых элементов в приводах в конструкции робота, диктующей чрезвычайно жесткие требования к их малогабаритным показателям, особенно при встраивании этих элементов в сочленение кинематических звеньев ПР. Для элементов электропривода (двигатель-редуктор) требование минимизаций их собственной массы является решающим.
4
Важное значение для правильного выбора типа привода и его компонентов имеет характер графики перемещения. Исследования характера перемещений звеньев ПР показывают, что типовым графиком движения ПР является трапецеидальный с участками разгона и торможения, суммарно не превышающими 10-20 % всего пути. Длительность переходных процессов определяется в 20-30 % времени цикла.
Таким образом, условия синтеза привода ПР сводятся к тому, чтобы обеспечить рациональные параметры системы редуктор – двигатель – регулятор, позволяющей реализовывать при заданных грузоподъ мности и пределах изменения статической и динамической нагрузок необходимые параметры манипуляционных движений с апериодическим позиционированием независимо от упругости кинематических звеньев и при наименьшей собственной массе.
Выбор типа привода не является однозначной задачей, поскольку каждый из них имеет свои достоинства и недостатки (табл. 1).
Однако проводимые в последние годы интенсивные работы по уменьшению массогабаритных показателей электропривода значительно расширяют сферу его применения в робототехнике.
Кроме того, важным достоинством электропривода является его хорошая совместимость с ЭВМ, которая может быть увеличена при программной реализации алгоритмов цифрового электропривода, обеспечивающей изменение структуры и параметров регуляторов привода пут м изменения управляющих программ. Расширение производства автоматизированных электроприводов, переход на их комплектную поставку повышают конкурентоспособность машиностроительной промышленности.
Свойства гидро-, пневмо- и электропривода ПР |
Таблица 1 |
|||||
|
||||||
|
|
|
|
|
|
|
Технические |
Гидравлический привод |
Пневматический |
Электро- |
|||
данные |
следящий |
|
шаговый |
привод |
привод |
|
|
|
|
|
|
|
|
Силовой элемент |
Гидро- |
Гидроусили- |
Пневмоцилиндр |
Электродвига- |
||
цилиндр |
|
тель |
тель |
|||
|
|
|
|
|
|
|
Габариты и вес / |
|
|
|
|
|
|
при той же |
Малые |
Малые |
Большие |
|||
мощности |
|
|
|
|
|
|
Перегрузка по |
Невозможна |
Невозможна |
Возможна в 10 |
|||
моменту / по силе |
раз и более |
|||||
|
|
|
|
|||
|
|
|
|
|
||
КПД системы |
Низкий |
Низкий |
Высокий |
|||
|
|
|
|
|
|
|
Редуктор |
Нет |
|
Есть |
Нет |
Есть |
|
|
|
|
|
|
|
|
5
Окончание табл. 1
Орган управления |
Электрогид- |
Шаговый |
Электро- |
Тиристорный |
|
равлический |
двигатель |
пневматический |
усилитель |
||
|
золотник |
|
клапан |
|
|
Вспомогательные |
Автономная |
Автономная |
Нет |
||
устройства |
гидросистема |
пневмосистема |
|||
|
|||||
|
|
|
|
||
Движущиеся |
Двигатель гидронасоса, |
Пневмомотор, |
Двигатель, |
||
гидронасос, гидромотор, |
|||||
части |
золотник |
клапан |
редуктор |
||
|
|
|
|||
|
|
|
|
|
|
Распределитель- |
Трубы и шланги |
Трубы и шланги |
Провода |
||
ная сеть |
|||||
|
|
|
|
||
Наличие масла |
Есть |
Есть |
Нет |
||
|
Необходимая смена |
|
|
||
Фильтры |
с простоем для |
Влагоотстойник |
|
||
|
промывки |
|
|
||
Уход |
Смена масла |
Минимальный |
Смена щ ток |
||
|
|
|
|
|
|
Время готовности |
Начальный нагрев |
Начальный |
Немедленно |
||
нагрев |
|||||
|
|
|
|
||
Операции при |
|
|
Промывка |
|
|
введении |
Промывка гидросистемы |
Нет |
|||
пневмосистемы |
|||||
в действие |
|
|
|
|
|
Обслуживающий |
Электрик, механик, |
Механик |
Электрик, |
||
персонал |
гидравлик |
механик |
|||
|
|||||
Уровень шума |
Высокий |
Высокий |
Низкий |
||
|
|
|
|
|
|
6
1.ЭЛЕКТРОПРИВОДЫ РОБОТОВ
1.1.Электромеханические свойства электрических двигателей
Основой электропривода являются электрические, электромеханические и механические преобразователи. При этом электродвигатель является электромеханическим преобразователем, имеющим две стороны: электрическую и механическую (рис. 1.1), характеризующиеся напряжением U , током I ,
моментом Mc и угловой скоростью . Рассмотрим основные уравнения такого
преобразователя, представленного в виде четыр хполюсника. При этом напряжение на якоре представляется в виде суммы падения напряжения на обмотке якоря и противо-ЭДС, зависящей от скорости. Момент сопротивления, направленный против скорости вала, уравновешивается моментом двигателя и динамическим моментом, зависящим от скорости. Система уравнений имеет вид (для двигателя постоянного тока)
U(p) Zя(p) i(p) C (p);
Мс(p) C i(p) Zm(p) (p),
где Zя(p) Rя Lя , p – операторное выражение электрического сопротивления;
Rя |
– активное сопротивление якоря; |
|
|
|
|
||||
Lя |
– его индуктивность; |
|
|
|
|
|
|
||
С – независимая постоянная; |
|
|
|
|
|
||||
Zm(p) I(p) – механическое сопротивление; |
|
|
|||||||
I |
– момент инерции якоря. |
|
|
|
|
|
|
||
Решая данную |
систему |
уравнений относительно |
угловой |
скорости |
|||||
и подставляя выражения для электромагнитной постоянной времени |
Tя Lя / Rя |
||||||||
и для электромеханической постоянной времени Tm I Rя /C2 , имеем |
|
||||||||
|
(p) |
|
1/С |
|
U(p) |
Rя /С2(1 Tя p) |
М |
с(p). |
|
|
1 Tm p(1 Tя p) |
|
|
||||||
|
|
|
1 Tm p(1 Tя p) |
|
|
||||
Таким образом, скорость двигателя выражают алгебраической суммой двух произведений: передаточной функции по управляющему воздействию на операторное выражение для напряжения и передаточной функции по возмущению на операторное выражение для момента нагрузки.
Передаточной функции по управляющему воздействию можно придать каноническую форму передаточной функции типового звена второго порядка и рассмотреть характер протекания переходного процесса. Соответствующие характеристики рассмотрены в курсе ТАУ. Структурная схема электромеханического преобразователя приведена на рис. 1.2.
7

В статическом режиме важное значение имеет механическая характеристика двигателя – статическая зависимость между моментом и скоростью, которую можно получить из выражения для скорости, приравнивая p 0:
С1 U СRя2 М .
При этом скорость холостого хода
0 U /C при M 0.
Ж сткость механической характеристики – производная М( ) по :
dM( )/d C2 / Rя .
Тогда выражение для механической характеристики имеет вид
0 1 М ,
или, переписав относительно момента,
M ( 0 ).
Эти зависимости справедливы для неизменного магнитного потока двигателя, при его изменении следует учитывать, что
С k Ф,
где k const, Ф – магнитный поток и соответственно
k Ф 2 / Rя .
Механическую характеристику при номинальном значении сопротивления якоря и напряжении называют естественной, она показана на рис. 1.3 жирной линией. Любую другую характеристику называют искусственной, однако возможно получение как минимум тр х семейств искусственных характеристик (рис. 1.3):
1.При уменьшении магнитного потока от номинального. При этом скорость холостого хода увеличивается, а ж сткость уменьшается, что приводит к увеличению наклона характеристик.
2.При уменьшении напряжения, подвед нного к якорю. Скорость холостого хода также уменьшается, но при неизменной жесткости. Искусственные характеристики параллельны естественной.
3.При увеличении сопротивления якоря (вводе дополнительных резисторов). Скорость холостого хода оста тся постоянной, а ж сткость уменьшается пропорционально введ нному сопротивлению.
8
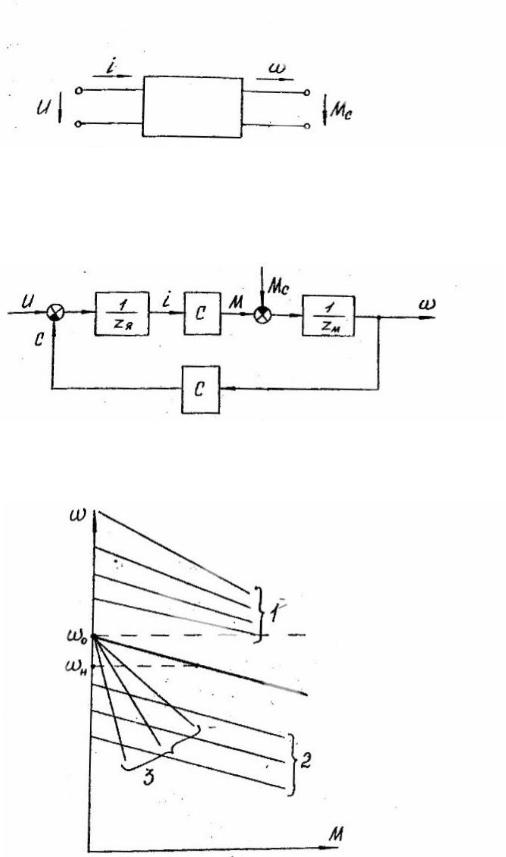
Рис. 1.1
Рис. 1.2
Рис. 1.3
9