

Методическое пособие 722
.pdfавтоматов и другого автоматического оборудования. Следовательно, предварительно выбирают двигатель по некоторой средней мощности, а затем проверяют по нагреву (по одному из следующих методов):
1.Прямая проверка заключается в построении графика превышения температуры согласно выбранной модели нагрева.
2.Все остальные методы относятся к косвенным. Первым из них является метод средних потерь. Определяют потери предварительно выбранного двигателя на каждом участке графика нагрузки (рис. 1.17), после чего находят средние потери
Pcp |
1 |
n |
Pk tk |
|
t |
||||
|
k |
|
||
|
ц |
|
|
и сравнивают с номинальными Pн .
Если Рср < Рн, то двигатель выбран правильно.
3. Метод эквивалентного тока. В случае если известна зависимость тока от времени цикла, то определяют эквивалентный ток
Iэ 
 t1ц kn Ik2 tk .
t1ц kn Ik2 tk .
ЕслиIэ Iн , то двигатель выбран правильно.
4. Метод эквивалентного момента основывается на предположении пропорциональной зависимости между током и моментом, что позволяет потоку определить момент. Также иногда известен график нагрузочных моментов. И в том, и в другом случае находят эквивалентный момент
Mэ 
 t1ц Mk2 tk ,
t1ц Mk2 tk ,
который сопоставляется с номинальным Mн : для правильно выбранного двигателя
Mэ Мн .
5.Метод эквивалентной мощности. Определяются мощности на каждом участке графика нагрузки, обычно при номинальной скорости. Определяют эквивалентную мощность
Pэ 
 t1ц kn Pk2 tk ,
t1ц kn Pk2 tk ,
а затем выбирают двигатель с Pэ ≤ Рн.
Этот метод наименее прост, но он широко применяется, так как удобен для расч тов.
20
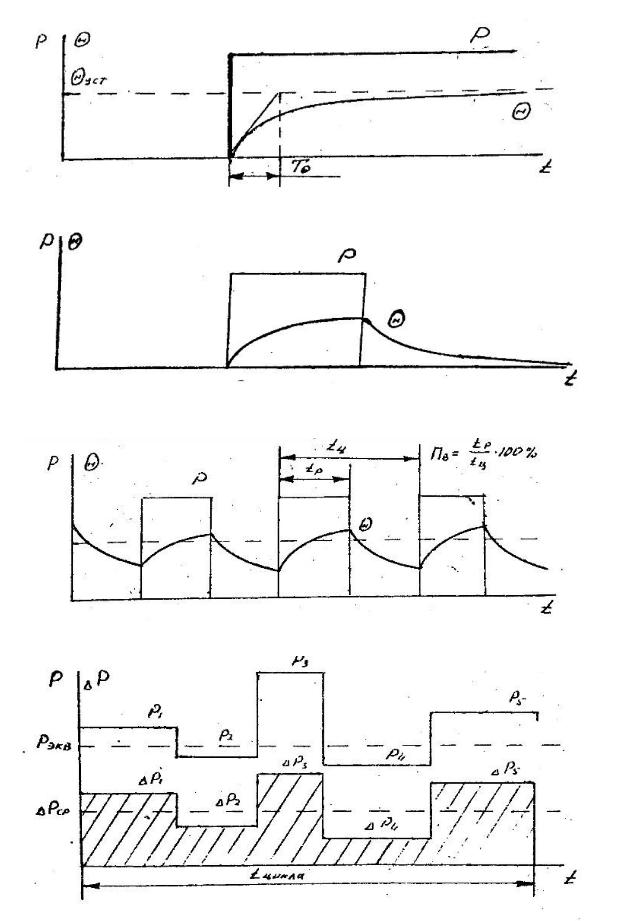
Рис. 1.14
 Рис. 1.15
Рис. 1.15 
Рис. 1.16
Рис. 1.17
21
Для повторно-кратковременного режима, кроме выбора мощности, важное значение имеет величина ПВ. Если она не совпадает с нормированной, то реальные параметры цикла заменяются эквивалентными по потерям ближайшего нормированного цикла.
1.3.Выбор передаточного числа редуктора
Втом случае, если при вводе значительную роль играют динамические нагрузки, появляется возможность значительного варьирования передаточным числом i. При этом с увеличением i быстро уменьшается приведенный к валу двигателя момент инерции нагрузки и, следовательно, уменьшается время разгона до номинальных оборотов и торможения до нуля. Вместе с этим уменьшается номинальная скорость установившегося движения исполнительного звена. При уменьшении i скорость установившегося движения раст т, но время разгона и торможения увеличивается. В связи с этим возникает задача выбора оптимального i, при котором время перемещения груза по координате было бы минимальным.
Оптимальное передаточное отношение редуктора при учете требований динамики в части обеспечения максимально возможного быстродействия определяется из выражения:
iопт 
 23m2
23m2 
 ( 32m2)2 m2 .
( 32m2)2 m2 .
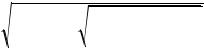
Эту формулу можно получить, рассматривая трапецеидальную диаграмму скорости рабочего механизма при отработке заданного перемещения
(рис. 1.18).
Длительность перемещения описывается выражением
t |
|
|
max |
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||
max |
2 |
p |
T |
||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
, |
где – заданное перемещение;
p и T – ускорения при разгоне и торможении. |
||||
Эти ускорения могут быть представлены как |
||||
|
|
i Mд Ммех |
|
i Mд Ммех |
|
p |
Iд i2 Iмех , |
T |
Iд i2 Iмех , |
где Iд и Iмех – моменты инерции двигателя и механизма относительно своих осей;
Mд – момент двигателя;
Ммех – статический момент нагрузки на оси механизма.
22
Для упрощения принимают Mд = const и Ммех = const и обозначают:
|
Iмех |
|
m |
Mмех |
|
h |
Мд |
|
|
||||||
|
Iд , |
|
Mд.max , |
|
Iд , |
||
где – коэффициент допустимой форсировки двигателя по моменту. Перепишем уравнение с учетом принятых обозначений и значений p
и T : |
|
|
i i2 |
|
|
t |
|
max |
|||
max |
h i2 |
m2 |
|
||
|
|
|
|
. |
|
Для нахождения оптимального значения iопт берут производную от полученного выражения по i и определяют условие экстремума:
i4 3m2 i2 m2 0,
отсюда и получают приведенную выше формулу.
Как правило, статический момент, приведенный к оси двигателя, в следящих системах, в том числе в приводах роботов, составляет 15–25 % от номинального момента двигателя или 8–12 % от пускового. Следовательно, если передаточное отношение редуктора, например, составляет 75–400, то соответственно m лежит в диапазоне (5÷50). При таких значениях параметра m оптимальное значение передаточного отношения редуктора существенно зависит от расчетной статической нагрузки.
На рис. 1.19 приведены расчетные кривые оптимального передаточного отношения от величины при различных значениях m. Как следует из кривых,
при существенных изменениях относительных параметров m и оптимальное
значение передаточного отношения редуктора лежит в достаточно узких пределах. При этом нижний участок диапазона относится к роботам малой грузоподъемности, а верхний – к роботам большой грузоподъемности. Параметр m оказывает большее влияние на іопт, чем .
23
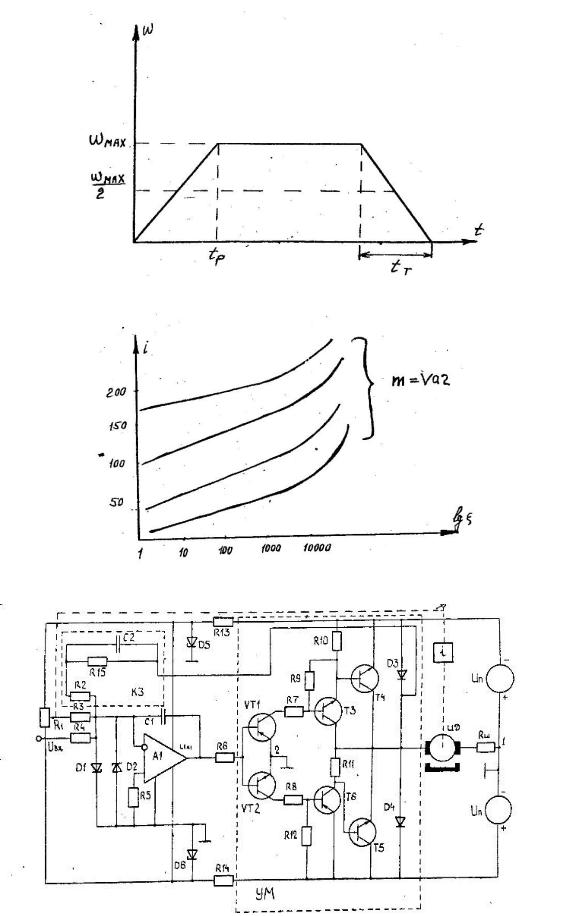
Рис. 1.18
Рис. 1.19
Рис. 1.20
24
1.4. Электропривод постоянного тока
Рассмотрим некоторые типовые примеры электроприводов промышленных роботов.
Схема привода с двигателем постоянного тока приведена на рис. 1.20, где приняты следующие обозначения:
R – потенциометр обратной связи;
A1 – суммирующий усилитель (на интегральной микросхеме); УМ – усилитель мощности; ИД – исполнительный двигатель; КЗ – корректирующее звено;
I – редуктор;
U,х – входной сигнал.
Питание привода осуществляется от источника И, имеющего среднюю
точку. На вход А1 поступает рассогласование, определяемое разностью Uвх и напряжением потенциометра R1. Два силовых нелинейных элемента образованы парами VTз, VT4, VT5 и VT6. Якорь ИД включен между средней
точкой Uв и общей точкой силовых элементов, управляемых с помощью VТ1 и VT2. Управление VТ1 и VT2 осуществляется от А1. Стабилизация питания А1
и потенциометра R1 обеспечивается с помощью параметрического стабили-
приводит к тому, что на выходе А появляется напряжение. Если выход А1 |
|
имеет положительный потенциал относительно точки 1, то транзистор VT1 |
|
переходит в активную область, а VT2 |
– в режим отсечки. Так как VT1 и VT2 |
имеют различную проводимость, то |
они могут одновременно находиться |
в активной области. |
|
затора на VD5, VD6, R13, R14. При неподвижном якоре ИД и нулевом сигнале на |
|
выходе A1 все транзисторы находятся на границе режима отсечки. Подача Uвх |
|
Переход VT2 в активную область приводит к увеличению проводимости цепи: «плюс» Uп – эмиттер – база VT6 – R6 – коллектор VT2 – эмиттер – точка 2.
В результате VT6 и VT5 |
переходят в активную область. По мере увеличения |
|
сигнала на выходе A транзисторы VT2 и VT6 |
переходят в режим насыщения, |
|
а VT5 будет близок к |
насыщению. В этом |
случае напряжение коллектор- |
эмиттер VT5 Uкз меньше Uп, а напряжение на якоре Uя = Uп. Транзистор VT1 |
||
в режиме отсечки практически не изменяет состояния VT3 и VT4, по сравнению |
||
с исходным, и поэтому токами VT3 |
и VT4 коллекторов можно пренебречь. |
|
Изменение полярности UА1 |
вызывает переход VT2 в режим отсечки, |
|
а VT1 |
– в активную область. VT3 |
и VT4 переходят в активную область, а VT5 |
и VT6 |
будут находиться на границе режима отсечки. Полярность на ИД будет |
|
противоположной. Коррекция осуществляется с помощью форсирующего звена R15, R2, C2. Механические характеристики имеют вид, изображ нный на рис. 1.21, где M – момент, α – угловая скорость, 1 и 2 – естественные характеристики ИД, 3 и 4 – характеристики, соответствующие активной области силовых транзисторов при фиксированных точках управления.
25
Система У–Д способна обеспечить значение M и α ограниченных естественными характеристиками ИД. Вне зоны насыщения усилителя М не зависит от α, так как усилитель обладает свойством источника тока. Введение отрицательной обратной связи (ООС) по напряжению, регулируемому с помощью R15, R2, позволяет компенсировать разброс параметров транзисторов, нелинейность их характеристик и обеспечить стабильность коэффициента усиления по напряжению. Если применить ОС по току якоря, то усилитель будет обладать свойствами источника тока. Реализация такой OС требует введения датчика тока в простейшем случае резистора R2, выбранного из условия.
Как недостаток схемы следует отметить, что в зоне больших сигналов, когда ИД выходит на естественную характеристику, напряжение на одном из силовых транзисторов вдвое больше максимального напряжения на якоре.
Для повышения коэффициента использования силовых транзисторов следует перейти к мостовой схеме выходного каскада, применив дополнитель-
ный инвертирующий |
усилитель |
и два |
комплекта |
основных |
усилителей |
|
(рис. 1.22). |
|
|
|
|
|
|
Блоки У и У´ включают в себя усилители А1 и предварительные каскады: |
||||||
усилитель А2 |
обеспечивает инвертирование Uвх (R1 / R2 = 1). |
При этом |
||||
Uп max = 2 Uп, а коэффициент усиления увеличивается вдвое. |
|
|||||
|
1.5. Электропривод переменного тока |
|
||||
Электропривод |
переменного |
тока |
рассмотрим |
на примере привода |
||
с асинхронным трехфазным двигателем.
АДД представляет собой электрическую машину с двумя обмотками, магнитные оси которых сдвинуты на 90º размещенными на статоре.
Ротор АДД имеет два исполнения: короткозамкнутое (к.з.); полое, которое можно рассматривать как к.з. с бесконечно большим числом стержней, расположенных друг от друга на бесконечно малом расстоянии.
В последнее время освоен выпуск АДД с к.з. ротором так называемый сквозной конструкции (типа ДКИ). У них статор и наружное кольцо подшипников имеют одинаковый диаметр, что позволяет обеспечить расточку за один установ. Это повысило точность при сборке, позволило уменьшить зазор до 39–50 МКМ, а следовательно, существенно снизить ток намагничивания, габариты.
Основные достоинства АДД следующие: отсутствие трущихся контактов; малый момент трения; большой ресурс и надежность.
При этом динамические показатели удовлетворительны.
26
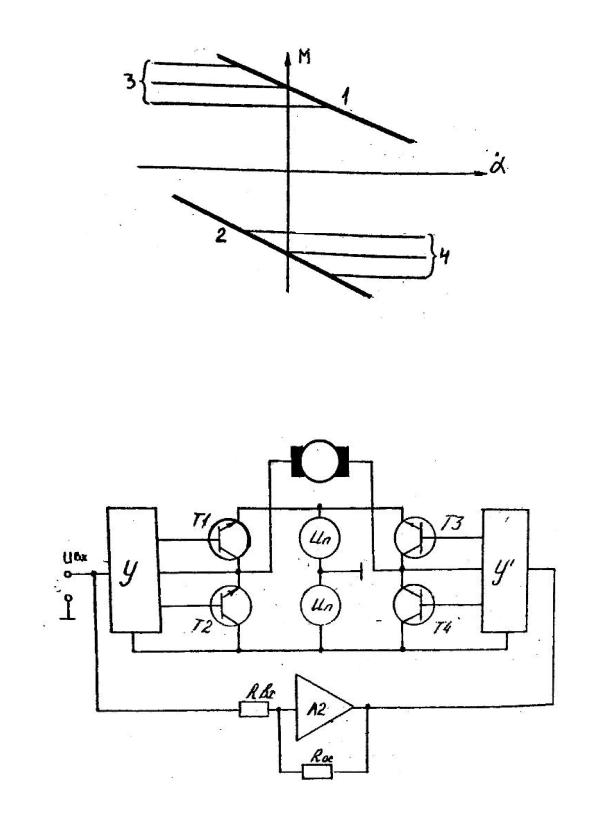
Рис. 1.21
Рис. 1.22
27
Все способы управления можно разбить на симметричные (поле в машине при любых управляющих сигналов оста тся круговым) и несимметричные (поле искажается, становится эллиптическим). К симметричным способам относятся изменение частоты питающего напряжения и изменение числа пар полюсов. При этом не обеспечивается широкий диапазон регулирования скорости.
К несимметричным относятся амплитудный, фазовый и конденсаторный способы.
При амплитудном способе сдвиг по фазе между напряжениями на обмотках постоянен и равен π/2. Изменение эллиптичности осуществляется путем изменения амплитуды на обмотке управления.
При фазовом способе амплитуда напряжений постоянна, меняется фаза между напряжениями.
При конденсаторном способе сдвиг по фазе между напряжениями на обмотках АДД осуществляют включением последовательно с обмоткой возбуждения конденсатора, а скорость регулируют изменением амплитуды на ОУ. Отличие от амплитудного способа состоит в том, что амплитуда и фаза на ОВ не остаются постоянными, так как изменяется падение напряжения на конденсаторе.
Рассмотрим привод с амплитудным управлением АДД (рис. 1.23). На этом рисунке:
А1 – суммирующий усилитель на интегральной микросхеме; КМ – ключевой модулятор; УМ – усилитель мощности;
Еп – напряжение однофазной сети питания; КЗ – корректирующее звено.
На входе А1 суммируются сигналы постоянного тока Uвх, Uп, Uкз. Выходной сигнал UA1 преобразуется КМ в сигнал переменного тока, напряжение коммутации Uк сдвинуто по фазе относительно Eп с помощью фазовращателя на π/2. Знак фазового сдвига определяется полярностью UA1. Далее сигнал усиливается УМ, к выходу которого подсоединена ОУ. В результате АДД через редуктор 1 поворачивает выходной вал и движок потенциометра R1.
Стабилитроны Д1 и Д2 обеспечивают защиту от перенапряжения. R3 служит для балансировки A1, а цепь C2, R11 – для коррекции A1.
Ключевой модулятор включает в себя интегральные прерыватели, выходной трансформатор и коммутирующий. УМ выполнен на базе линейного усилителя.
При конденсаторном управлении исключается С5 и включается фазосдвигающий конденсатор последовательно с ОВ.
28
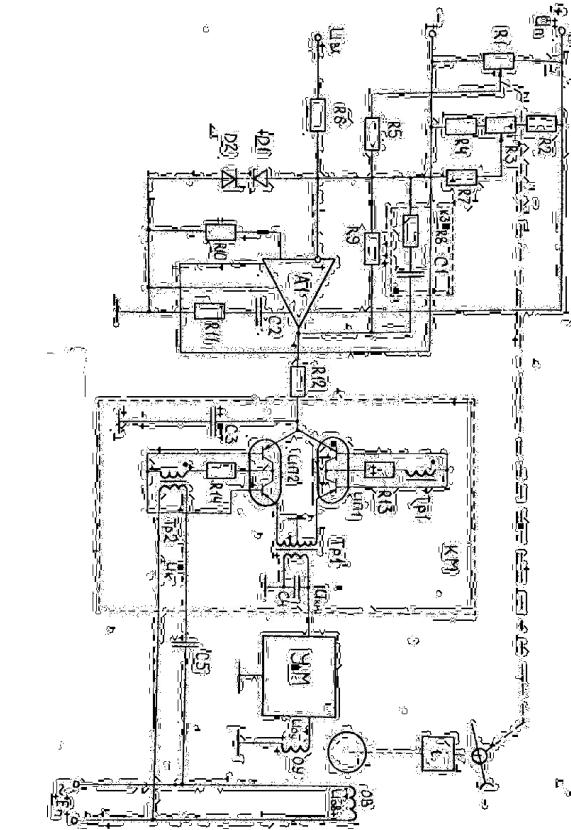
Рис. 1.23
29