

Методическое пособие 722
.pdfНаиболее прост мембранный механизм без жесткого центра (рис. 2.3). Площадь поверхности S можно разбить на ряд элементарных равно-
бедренных треугольников с вершинами в центре. Равнодействующая сила давления приложена на расстоянии R/3 от основания. Опорная реакция обратно пропорциональна расстоянию от опоры до точки приложения и будет
составлять |
|
– защемленного контура в центре. |
|
Усилие, передаваемое на центр:
Эффективная площадь мембраны (площадь, которая, будучи умноженной на перепад давления, определяет усилие в центре):
Имеются зависимости, позволяющие учитывать наличие жесткого центра, перепада давления при расчете хода и усилия на штоке.
Сильфоны. Цилиндрические сильфоны (рис. 2.4), выполненные из металла, допускают перемещение на 25 % свободной длины, из которых 15 % отводится на сжатие и 10 % на растяжение.
За эффективный диаметр сильфона приближенно принимают средний диаметр Рср.гофр., в соответствии с чем усилие, развиваемое сильфоном при действии внутреннего давления, может быть определено как
,
где Dср = (D1+D2)/2.
Моментный цилиндр. Он состоит, как показано на рис. 2.5, из корпуса 1: поворотного привода, состоящего из втулки 2 лопасти 3; уплотнительных перемычки 4.
При подводе жидкости в верхней клапан втулка 2 и лопасть 3 будут поворачиваться по часовой стрелке. Угол поворота обычно не превышает 270...2800. Расч тный момент равен
М = p F Rn,
где р – перепад давлений;
( ) – рабочая площадь; b – ширина пластины;
( ) ( ) – плечо приложения силы; D и d – диаметр цилиндра и диаметр ротора.
60
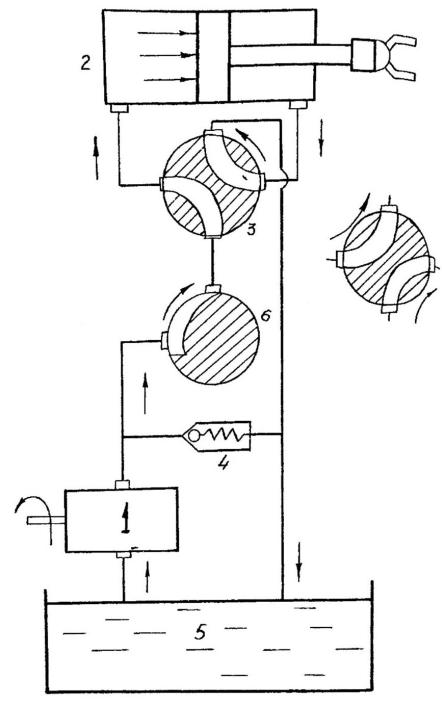
Рис. 2.1
61
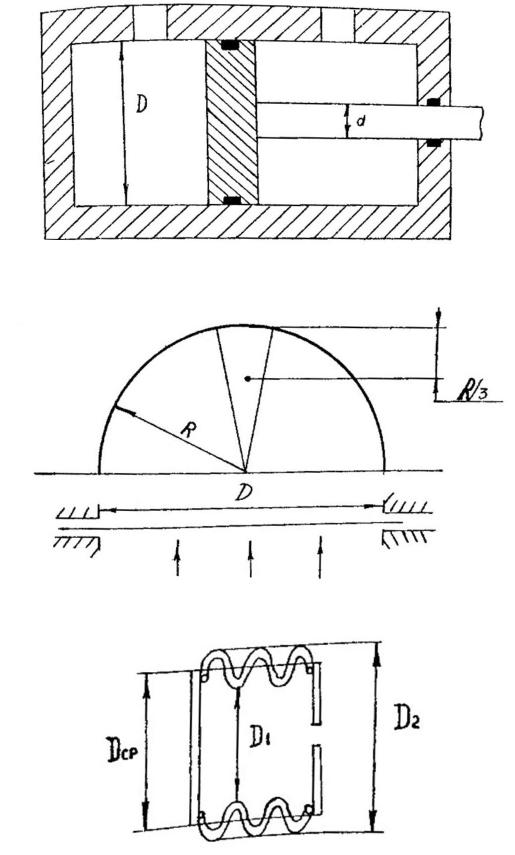
Рис. 2.2
Рис. 2.3
Рис. 2.4
62
В соответствии с этим
( |
) ( |
) |
( |
) |
. |
|||
|
|
|
|
|
|
|
|
|
Угловую скорость ω определяем из равенства расходов Q и объема описываемого пластиной в единицу времени:
Q = Vок F,
где Vок – окружная скорость центра давления. Подставив значения:
( )
( )
получим |
( )( ) |
( |
) |
|
|
|
|
|
|
|
|
|
|
|
отсюда ( )
Гидромоторы вращательного действия. Гидромоторы разделяют на шестер нчатые, винтовые, шиберные (пластинчатые) и поршневые. Поршневые моторы, в свою очередь, делятся на радиальные и аксиальные.
Врадиально-поршневой машине поршни, вращаясь вместе с блоком цилиндров, участвуют в возвратно-поступательном движении в радиальном направлении.
Кинематическая схема для одного поршня показана на рис. 2.6. Механизм представляет собой инверсию кривошипно-шатунного механизма. Кривошип 00’ вращается вокруг 0’, скользит концом C по лучу ОС оси цилиндра, вращающегося вокруг центра 0. Такие гидромоторы развивают скорости от долей до нескольких десятков оборотов в минуту.
Вприводе ПР наибольшее распространение получили аксиальнопоршневые гидромоторы. По сравнению с другими гидромашинами, они отличаются наибольшей компактностью и наименьшей массой.
Они разделяются на гидромашины с наклонным блоком цилиндров
инаклонным диском. Кинематические схемы их приведены на рис. 2.7, 2.8.
Вмашинах с наклонным блоком ось вращения блока цилиндров 1 наклонена к оси вала 2, в ведущий диск 3 заделаны головки 4 шатунов 5, закрепленных при помощи сферических шарниров 6 в поршнях 7. Блок 1 и вал 2 вращаются вокруг своих осей, поршни при этом совершают возвратнопоступательное движение (рис. 2.7).
Вгидромашинах с наклонным диском блок цилиндров 1 с поршнями 2
вращается вместе с валом 3. Поршни опираются на наклонный диск 4 и, благодаря этому, совершают возвратно-поступательное движение (рис. 2.8).
63
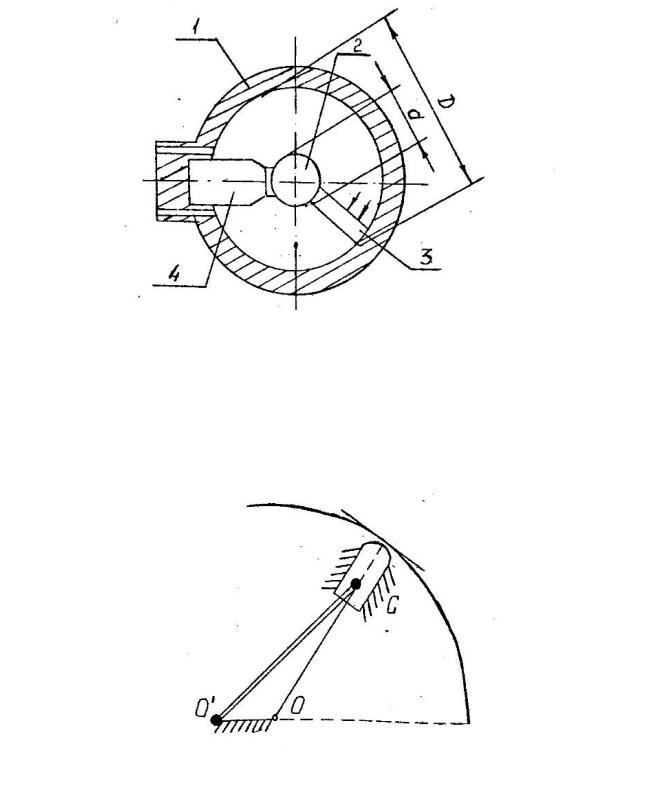
Рис. 2.5
Рис. 2.6
64
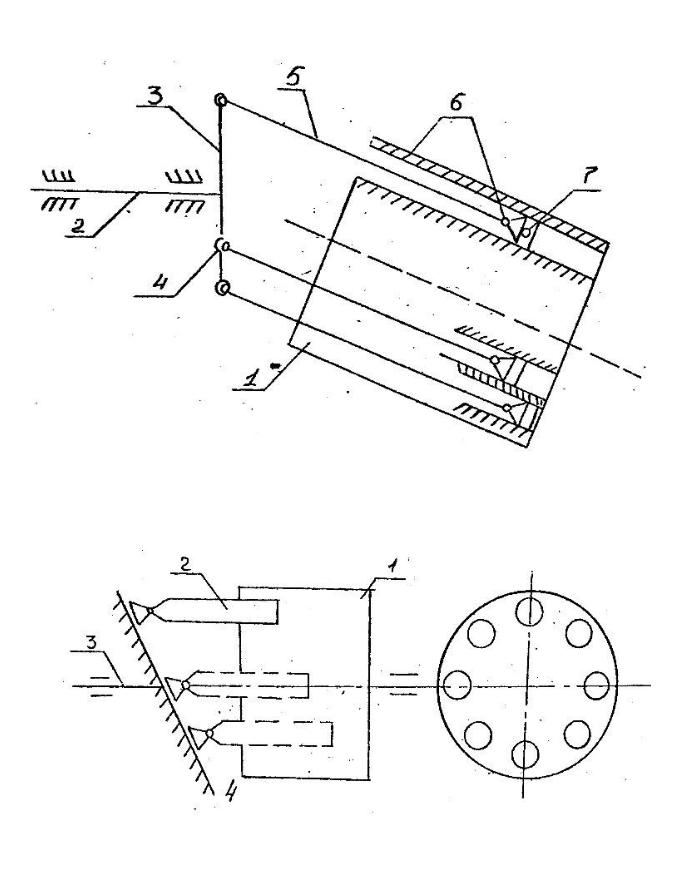
Рис. 2.7
Рис. 2.8
65

Устройства распределения и регулирования. Распределители разде-
ляют на золотники, краны и клапаны.
Площадь рабочего окна (проходного сечения гидроаппарата, в котором происходит изменение параметров потока) изменяется, соответственно, с помощью:
а) осевого смещения распределительного элемента (золотники); б) путем поворота пробки (краны); в) путем открытия и закрытия расходных окон (клапаны).
Золотниковые и крановые распределители. Такие распределители состоят из перемещающегося во втулке (гильзе) плунжера, на котором выполнены кольцевые проточки. Подвод и отвод жидкости осуществляются через окна питания.
По количеству подключенных внешних линий различают источники четырехлинейные, трехлинейные и двухлинейные золотники (рис. 2.9, 2.10 и 2.11 соответственно).
Если плунжер золотника не задерживается в среднем положении, то такой золотник называют 2-позиционным, если задерживается с помощью каких-либо устройств, то 3-позиционным.
Различают распределители с положительным (рис. 2.12), отрицательным (рис. 2.13) и нулевым (рис. 2.14) перекрытиями.
В идеальном золотнике имеет место линейная зависимость расхода Q от сигнала управления (перемещения золотника) (рис. 2.15).
Гидравлическое сопротивление золотника Р зависит от конструктивных особенностей, достаточно точно выражается параболой и может быть определено (в общем случае) зависимостью
( )
где (ϭ = 3 – 5, в зависимости от числа поворотов потока).
Поток жидкости в золотнике является преимущественно турбулентным. В крановых распределителях рабочий элемент (пробка) цилиндрического или кранового типа (рис. 2.16) совершает поворотные движения относительно
своей оси движения.
Крановые распределители применяются при давлении до 100 кг/м, поскольку при больших давлениях сила трения пробки о стенки должна достигать значительных величин. На рис. 2.17 показаны схемы включения распределителя в систему управления силовым цилиндром.
Пробка имеет два перпендикулярных, но непересекающихся отверстия. Она может занимать два или более угловых положения.
Клапанные распределители. Регуляторы. Эти распределители просты в изготовлении, надежны в эксплуатации, могут обеспечить высокую, практически полную, герметичность. Схема клапана показана на рис. 2.18.
66
Затворы клапанов приводятся в действие ручными, механическими и электромеханическими устройствами.
Распространены клапаны с качающимся рычагом, схема которого для питания гидроцилиндров показана на рис. 2.19 (4-ходовый клапанный распределитель). При повороте рукоятки 1 перемещается пара клапанов 2 или 3, обеспечивая подвод (отвод) жидкости к соответствующей полости силового цилиндра 4.
Сила, действующая на хвостовик закрытого клапана, определяется из выражения (рис. 2.20):
R = P1 F1 + Pnp + Sn – P2 (F2 – f),
где F1 и F2 – площади поверхностей контакта затвора F = π D2/4 с гнездом по
диаметрам D1 и D2;
pnp – усилие затяжки пружины; Sn – сила трения покоя;
f = π d2/4 – площадь хвостовика m затвора.
При условии pnp = const, P1 = const усилие R1, необходимое для перемещения затвора после того, как он оторвется от седла, составит
R1 = P1 F1 + Sϭ + Pnp – P2 (F2 – F) – Pcp (F1 –F2),
где Sϭ – сила трения движения;
Pcp = (R1 – R2)/2 – среднее давление в щели.
Следовательно, после отрыва затвора от гнезда усилие, необходимое для дальнейшего его перемещения, снизится (R > R1).
Клапаны используются в основном в качестве регуляторов давления
ирасхода. Клапанные регуляторы давления бывают нескольких типов.
1.Предохранительные (переливные). Они ограничивают превышение давления путем периодического и однократного отвода жидкости в бак
(рис. 2.21).
2.Редукционные (редукторы). Это автоматические клапаны, сопротивление которых равно разности между переменным давлением Рвх на входе
ипостоянным (редуцированным) давлением Ррез на выходе (рис. 2.22):
Рред < Рвх .
Жидкость под давлением Рвх, подводимая через канал 1 в камеру 2, пройдя дросселирующую щель, поступает в камеру 3 и канал 4 потребителя. Пружина 5 стремится открыть затвор, а силы давления на мембрану 6 Ррез и Рвх стремятся его закрыть. Для демпфирования колебаний применен дроссель 7.
67
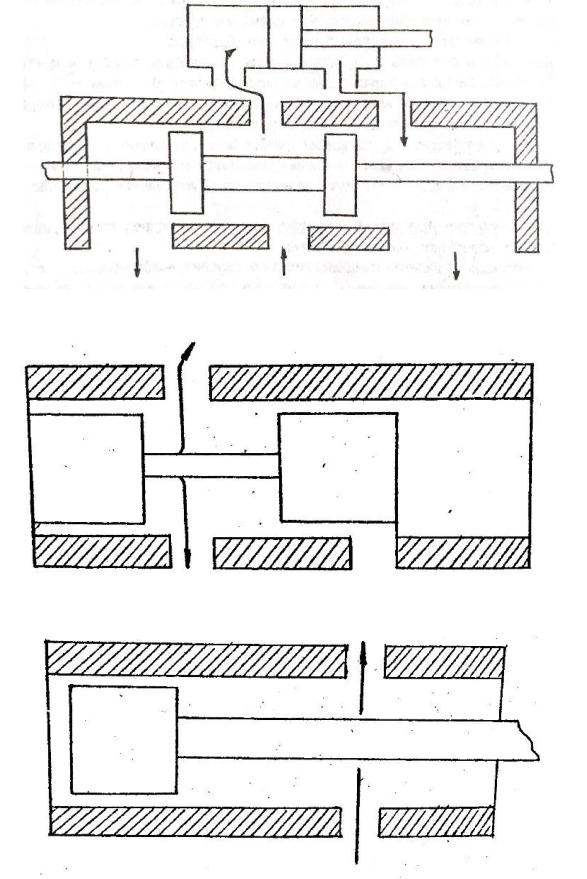
Рис. 2.9
Рис. 2.10
Рис. 2.11
68
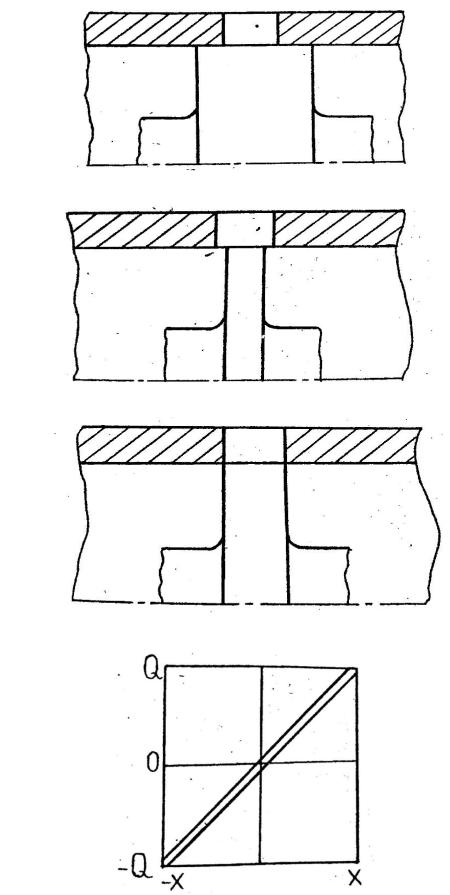
Рис. 2.12
Рис. 2.13
Рис. 2.14
Рис. 2.15
69