

Электропривод в современных технологиях. лабораторный практикум. Крысанов В.Н., Иванов К.В
.pdfВ. Н. Крысанов, К. В. Иванов
ЭЛЕКТРОПРИВОД В СОВРЕМЕННЫХ ТЕХНОЛОГИЯХ
Лабораторный практикум
Воронеж 2019
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования «Воронежский государственный технический университет»
В. Н. Крысанов, К. В. Иванов
ЭЛЕКТРОПРИВОД В СОВРЕМЕННЫХ ТЕХНОЛОГИЯХ
Лабораторный практикум
Воронеж 2019
УДК 62-83(075.8) ББК 31.291я7
К853
Рецензенты:
кафедра электроэнергетики Международного института компьютерных технологий (зав. кафедрой д-р техн. наук, профессор А. Н. Анненков);
д-р техн. наук, профессор кафедры ЭАУТС ВГТУ В. М. Питолин
Крысанов, В. Н.
Электропривод в современных технологиях: лабора-
торный практикум / В. Н. Крысанов, К. В. Иванов; ФГБОУ ВО К853 «Воронежский государственный технический университет». –
Воронеж: Изд-во ВГТУ, 2019. – 92 с.
ISBN 978-5-7731-0741-5
В практикуме описывается шесть лабораторных работ. Каждая включает теоретические пояснения, порядок выполнения работы и вопросы для самостоятельной подготовки.
Издание соответствует требованиям Федерального государственного образовательного стандарта высшего образования по направлению 13.03.02 «Электроэнергетика и электро-
техника» (профили «Электропривод и автоматика», «Электромеханика», «Электроснабжение»), дисциплине «Электро-
привод в современных технологиях».
Ил. 32. Библиогр.: 24 назв.
УДК 62-83(075.8) ББК 31.291я7
Печатается по решению учебно-методического совета Воронежского государственного технического университета
ISBN 978-5-7731-0741-5 © Крысанов В. Н., Иванов К. В., 2019
©ФГБОУ ВО «Воронежский государственный технический университет», 2019
ВВЕДЕНИЕ
В настоящее время электропривод является неотъемлемой частью технологического прогресса. Невозможно представить себе промышленное производство, в составе которого отсутствовали бы электроприводы. Кроме того, электропривод встречается во всех сферах жизни, начиная от мелких и крупных бытовых приборов, и заканчивая медициной и транспортом.
Современный вектор развития направлен на автоматизацию и интеллектуализацию производства, поэтому, в первую очередь, изменения касаются и электропривода. Бурное развитие полупроводниковой техники позволило создавать полностью управляемые системы под любые задачи: стабилизация электромеханического момента (для подъемных устройств и т.п.), стабилизация частоты вращения (для обрабатывающих станков и т.п.), следящий режим управления (для роботовманипуляторов и т.п.).
Автоматизация позволяет реализовывать режимы значительного энергосбережения, что особенно актуально в системах «Умный дом», при использовании нетрадиционных источников энергии.
Учитывая актуальность вышеотмеченных направлений, данный лабораторный практикум включил в себя курс лабораторных работ с необходимым объемом теоретической информации по ключевым направлениям электропривода в разрезе технологических процессов, практическими рекомендациями по методике выполнения работ, а также анализом полученных результатов.
Рисунок на обложке [1].
3
Лабораторная работа № 1
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ СИЛОВОЙ ЧАСТИ ЧАСТОТНО-РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ
Теоретические сведения
Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Это объясняется простотой конструкции и высокой надежностью, связанной с отсутствием щеток и контактных колец. Длительное время асинхронный двигатель использовался, в основном, в нерегулируемых электроприводах, хотя теоретические способы регулирования его скорости были известны. Одновременно велись работы по созданию регулируемого привода переменного тока.
При всех известных способах регулирования скорости асинхронного двигателя, только электропривод с регулированием путем изменения частоты напряжения на статоре мог составить конкуренцию приводу постоянного тока с двигателем независимого возбуждения в тех устройствах, в которых требуется большой диапазон регулирования скорости и предъявляются высокие требования к точности ее поддержания и динамическим характеристикам привода. Это удалось обеспечить внедрением статических преобразователей частоты, которые стали эффективно использоваться для плавного регулирования скорости трехфазных электродвигателей переменного тока. Сегодня трехфазный электродвигатель переменного тока, управляемый преобразователем частоты, является стандартным элементом технологических установок.
Кроме плавного регулирования скорости система преобразователь частоты – асинхронный двигатель (ПЧ-АД) имеет ряд других преимуществ:
4
1)энергосбережение при соответствии скорости электродвигателя требованиям в любой заданный момент времени, причем без использования устройств регулирования с большими потерями мощности (например, различные заслонки, сопротивления). Это относится, в частности, к центробежным насосам и вентиляторам, у которых потребляемая мощность находится в кубической зависимости от скорости;
2)оптимизация производственного процесса за счет регулирования его скорости протекания. Это позволяет добиться увеличения производительности и уменьшения процента брака;
3)предотвращение ударных нагрузок на исполнительные механизмы за счет плавного пуска и торможения. Таким образом уменьшается объем технического обслуживания оборудования;
4)улучшение условий труда, например, за счет уменьшения шума.
Частотный преобразователь электронного типа – это устройство, состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты
впостоянный, и инвертора (преобразователя, иногда с ШИМ), преобразующего постоянный ток в переменный требуемой частоты и амплитуды (рис. 1.1). Выходные тиристоры (GTO) или транзисторы (IGBT) обеспечивают необходимый ток для питания электродвигателя.
Для улучшения формы выходного напряжения между преобразователем и двигателем иногда ставят дроссель, а для уменьшения электромагнитных помех – ЭMC-фильтр.
Входной каскад выпрямляет подаваемое синусоидальное напряжение сети, получая, таким образом, промежуточное постоянное напряжение. С помощью индуктивно-емкостного фильтра постоянное напряжение сглаживается, его форма приближается к прямой линии.
5

Рис. 1.1. Типовая схема частотного преобразователя
Далее сглаженное постоянное напряжение служит источником электропитания для управляемого инвертора. По сигналам с цифрового устройства управления отпираются силовые ключи в инверторе. В результате, на выходе преобразователя частоты получается сигнал с импульсной модуляцией, который формирует в обмотках статора токи синусоидальной формы с параметрами, обеспечивающими требуемый режим работы электродвигателя.
Цифровое управление силовым преобразователем осуществляется с помощью микропроцессорных аппаратных средств и соответствующего поставленным задачам программмного обеспечения. Вычислительное устройство в режиме реального времени вырабатывает сигналы управления модулями, а также производит обработку сигналов измерительных систем, контролирующих работу привода. Современная цифровая система управления, кроме осуществления необходимых вычислений для работы инвертора, реализует множество дополнительных функций, связанных с работой электродвигателя. Среди этих функций: отслеживание значения тока в фазах двигателя, контроль температуры двигателя и преобразователя, реализация ПИД-регулятора, прием и выдача аналоговых сигналов, обработка промышленных интерфейсов связи, обработка сигналов с панели оператора, контроль входного напряжения.
6
Управление асинхронными двигателями осуществляется двумя способами: скалярное управление и векторное управление.
Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем. Скалярное управление используется в случаях, когда нагрузка на валу двигателя не переменная и не требуется хорошая динамика (насосы, вентиляторы).
При использовании скалярного управления не требуется датчик положения ротора для оценки скорости и не предъявляются высокие требования по быстродействию к системе управления, следовательно, ее стоимость уменьшается. Однако, электродвигатель со скалярным управлением может выйти из равновесного состояния, особенно когда момент нагрузки превысит предельное значение. Диапазон изменения скорости при скалярном управлении не превышает 1:10.
Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор
7
тока, осуществляющий непосредственное управление моментом вращения.
Для реализации векторного управления требуется датчик положения ротора, либо точная математическая модель электродвигателя. Векторное управление требует большого объема вычислений в единицу времени, следовательно, повышается стоимость системы управления.
Вкачестве ключевых элементов силовой части преобразователей частоты используются силовые ключи с принудительной коммутацией, такие как IGBT (insulated-gate bipolar transistor англ. – биролярный транзистор с изолированным за-
твором), MOSFET (metal – oxide – semiconductor field – effect transistor англ. – металл-оксид-полупроводниковый полевой транзистор (МОП-транзистор)) и GTO (gate turn-off thyristor
англ. – запираемый тиристор). Асинхронные машины, питаемые от широтно-импульсных преобразователей (инверторов)
PWM (pulse-width modulation англ. – широтно-импульсная мо-
дуляция), теперь постепенно заменяют двигатели постоянного тока и тиристорные мостовые преобразователи. С PWM связанны современные методики управления, такие как управление обмоткой возбуждения или прямое управление вращающим моментом. Но теперь стало возможным получить ту же самую гибкость в быстродействии и управлении вращающего момента, как для машин постоянного тока.
Вэтой лабораторной работе изучается построение простого разомкнутого контура электропривода постоянного тока, который будет управлять асинхронной машиной. Электрическая схема модели (построенной с помощью библиотеки SimPowerSysytems) показана на рис. 1.2. Она состоит из блоков библиотек Machines (машины) и Power Electronics (силовая электроника).
8
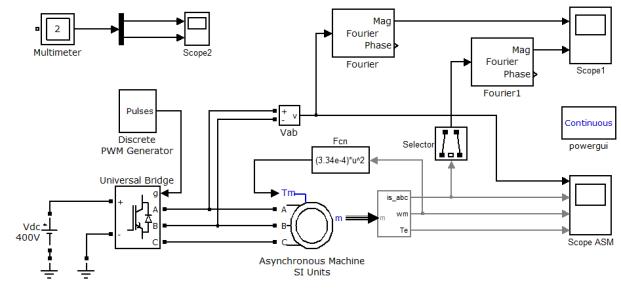
9
Рис. 1.2. Асинхронный двигатель, управляемый широтно-импульсным преобразователем (инвертором)