

Методическое пособие 637
.pdfРис. 2.6. Коммутационные напряжения конденсатора, полученные с различными начальными значениями
30
Лабораторная работа № 3
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ В СРЕДЕ MATLAB ПЕРЕХОДНЫХ ПРОЦЕССОВ ПОДКЛЮЧЕНИЯ ЭП И УПП ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ
Теоретические сведения
Асинхронные двигатели получили широкое распространение в промышленности. Это привило к появлению различных способов их запуска и регулирования скорости вращения.
При подключении двигателя напрямую к источнику питания напряжение возрастает скачкообразно от 0 до номинального напряжения питания. Поэтому во время разгона электродвигателя через обмотку статора протекает высокий пусковой ток, который достигает 6-8-кратного (а порой и 10-12-кратного) значения по сравнению с номинальным. С учетом этого, пусковой режим электродвигателя создает дополнительную токовую нагрузку на питающую сеть. На практике часто источник питания не рассчитан на такую мощность и, соответственно, не может обеспечить столь высокий ток. В результате значение напряжения в питающей сети снижается. Увеличение тока и падение напряжения вызывает дополнительный износ оборудования, с этим явлением приходится бороться, что приводит к дополнительным финансовым затратам.
Другой недостаток при пуске электродвигателя напрямую от сети – высокие нагрузки на механические узлы. Они возникают по той же причине, что и токи: скачкообразная подача напряжения питания. Поскольку пусковой ток высокий, а крутящий момент связан с током, то он может достичь 150200% от номинального, при этом в момент запуска механические узлы, соединенные с валом двигателя, испытывают перегрузки. Для предотвращения поломок производитель вынужден закладывать дополнительный запас прочности, что сказывается на стоимости оборудования.
31
На производстве часто возникают ситуации, при которых технологическое оборудование, например, компресс-сор, работает в повторно-кратковременном режиме. Следовательно, актуальной задачей является использование устройства плавного пуска (УПП) на основе системы тиристорный регулятор напряжения – асинхронный двигатель (ТРН – АД). Такие устройства позволяют регулировать амплитуду питающего напряжения, при этом она растет постепенно по специальному алгоритму от минимального до максимального значения. Данный способ даёт возможность запускать двигатель плавно, а также ограничивать пусковой момент и ток, что снижает вероятность перегрева обмоток и устраняет рывки в механической части привода в момент пуска и остановки. УПП обеспечивает защиту АД от перегрузок, имеет возможность отключения в аварийной ситуации, время аварийного отключения может составлять не более 30 мс, при этом оно носит характер мягкого отключения в нуле, и опасность перенапряжений исключается. Правильно выбранное и настроенное устройство плавного пуска повышает показатели долговечности и безотказности работы электродвигателя и его привода.
Также на производстве может возникнуть ситуация, при которой требуется изменять скорость вращения асинхронного двигателя. Для этого применяются специализированные механические, электромеханические и электронные устройства. Но, как правило, их стоимость велика. По этой причине актуальной задачей является использование относительно дешевого устройства плавного пуска в качестве регулятора скорости.
Существует огромное количество УПП, но можно сказать, что оборудование мощностью от 1 до 400 кВт с напряжением, не превышающим 660 В, имеет одинаковую силовую часть, известную ещё с начала 20-го века. Это три комплекта, которые показаны на рис. 3.1, если устройство не реверсивное, и 5 комплектов, которые показаны на рис. 3.2, если устройство реверсивное, полупроводниковых управляемых вентилей (тиристоров, симисторов, транзисторов), и систему импульснофазового управления. Изменение угла управления изменяет
32
действующее значение напряжения в системе и, как следствие, вызывает уменьшение или увеличение частоты вращения вала двигателя.
Классифицировать УПП можно по типу оборудования, которое используется в силовой части:
тиристоры (IGCT, GTO) (рисунок 3.1, а). При подаче отпирающего сигнала на управляющий электрод тиристора от системы импульсно фазового управления (СИФУ), формируется угол отпирания. Тиристоры VS1-VS3 работают на положительную полуволну напряжения, а тиристоры VS4-VS6 – на отрицательную;
симисторы (TRIAC) (рисунок 3.1, б). Симистор – полупроводниковый прибор, являющийся разновидностью тиристора. При подаче отпирающего импульса на управляющий электрод он переходит в проводящее состояние. Особенностью симистора является то, что в открытом состоянии он пропускает ток в обоих направлениях. Запирание происходит, когда ток через основные электроды меняет направление;
биполярные транзисторы (IGBT) (рисунок 3.1, в). Позволяют маломощным сигналом управлять током в электрической цепи. Транзисторные ключи переменного тока обладают главным достоинством – они могут несколько раз за период коммутировать нагрузку.
На рис. 6 показана схема реверсивного регулятора напряжения.
Современные тиристорные регуляторы напряжения можно разделить по принципу работы:
управление напряжением. Обеспечивается плавный запуск и остановка двигателя без обратной связи по току и моменту. Происходит плавное нарастание или спад значения питающего напряжения. При такой работе необходимо задавать время разгона и остановки.
33
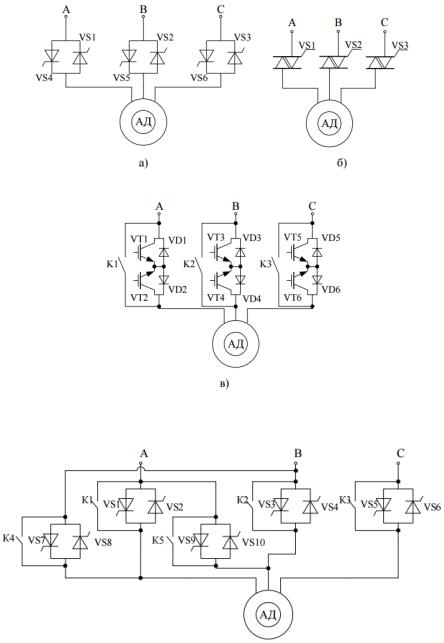
Рис. 3.1. Нереверсивная схема УПП, выполненная на: а) тиристорах; б) симисторах; в) встречно включенных
IGBT [14]
Рис. 3.2. Реверсивная схема УПП [14]
34

управление током. Изменение значения питающего напряжения происходит при ограничении тока. В данном случае при достижении значением тока заданного предела, нарастание значения напряжения прекращается. Эта функция актуальна в тех случаях, когда мощность подстанции, генератора или любого другого источника энергии ограничена. Однако, пуск с управлением по току не дает линейного переходного процесса.
– управление моментом. ТРН поддерживает необходимое постоянное значение момента, тем самым обеспечивая пуск с минимальным значением тока. Данный способ управления обеспечивает более тщательный контроль пуска (останова) механизма, снижая ток в среднем на 20%. Система управления, замкнутая по моменту, дает линейный график разгона.
Переходные электромагнитные процессы в электромеханических системах асинхронных электроприводов без использования специальных статических преобразователей и с ними, можно моделировать с помощью программы Matlab.
Методика проведения лабораторной работы
1. Построение модели асинхронного электропривода с устройством плавного пуска на основе тиристоров
1.1.Создать модель и сохранить под именем «circuit3».
1.2.Открыть библиотеку Machines (машины). Скопи-
ровать блок Asynchronous Machine SI Units (асинхронный дви-
гатель с системой единиц СИ), а также скопировать Machines Measurement Demux (блок измерения и разделения параметров двигателей) в модель.
Параметры асинхронного двигателя установить согласно таблице 3.1 для типономинала 4А132М4. При вводе этих данных необходимо указывать индуктивность рассеивания согласно формулам ниже:
35

1.3.Для питания асинхронного электродвигателя добавить блок Three-Phase Source (трехфазный источник) из раздела Electrical Sources (электрические источники).
Задать Phase-to-phase rms voltage (среднее межфазное напряжение) 380 В, Frequency (частота) 50 Гц, убрать галочку Specify Impedance (определить импеданс), в оставшиеся поля вписать 0.
1.4.Добавить блок Thyristor (тиристор) из раздела Power Elements (силовые элементы), который будет являться коммутационным элементом.
В разрыв двух фаз включаются 2 встречно параллельных тиристора для обеспечения прохождения переменного тока в обоих направлениях. Поэтому необходимо добавить еще
3 блока Thyristor.
1.5.Для формирования импульсов на отпирание тиристоров необходимо смоделировать систему импульснофазового регулирования (СИФУ). Для этого добавить блок
Synchronized 6-pulse generator (синхронизированный 6-
импульсный генератор) из раздела Extra Library/Control Blocks (Дополнительная библиотека/Блоки управления).
В его параметрах установить следующие значения:
Frequency of synchronisation voltages (частота синхро-
низирующих напряжений): 50 Гц;
Pulse width (ширина импульса): 5 градусов.
1.6.Для правильного функционирования и синхронизации на входы генератору импульсов необходимо подать линейные напряжения трехфазного источника. Для этого добавить между каждой фазой источника Voltage Measurement (вольтметр) и подключить соответственно.
1.7.Вход Block (блокировка) генератора импульсов отвечает за включение или отключение генерации. Чтобы выключить генерацию, на этот вход необходимо подать ненулевой сигнал.
36
Добавить в модель блок Step (шаг), Initial value (начальное значение) установить «1», Final value (конечное значение) установить «0», Step time (время шага) установить «0.0001». Таким образом, генератор сигналов до момента времени 0.0001 будет выключен, а затем начнет генерацию.
1.8.На вход alpha_deg (альфа, градусы) необходимо подавать желаемое значение угла отпирания тиристоров, которыми управляет генератор. В нашем случае, для плавного пуска электродвигателя угол отпирания должен изменяться таким образом, чтобы на выходе УПП напряжение изменялось от минимального до максимального.
Для этого необходимо сделать задатчик угла отпирания. Добавить в модель блок Clock (часы), Saturation (ограничитель)
иFcn (функция). Для блока Saturation задать Upper limit (верхний предел) a0, Lower limit (нижний предел) – a1.
Переменные a0 и a1 будут являться задающими угол отпирания – начальный угол и конечный соответственно. Так как электродвигатель является активно-индуктивной нагрузкой, углом отпирания, при котором выходное напряжение равняется 0, будет являться угол в промежутке 90-180°. А максимальное выходное напряжение будет достигаться при угле отпирания в диапазоне 0-90°.
1.9.В блок Fcn ввести выражение: a0-((a0-a1)/T*u), где T
– время нарастания угла отпирания от a0 до a1, u – входной сигнал (время).
Данное выражение описывает зависимость в виде прямой линии с изменяющимся наклоном, которая проходит через точки (0:a0) и (T:a1), формируя таким образом задающий угол отпирания.
1.10.Выходом генератора импульсов является вектор, состоящий из 6 последовательностей единичных импульсов, каждый из которых управляет соответствующим коммутационным элементом. Однако, в данной системе используется только 4 тиристора, поэтому следует выделить необходимые импульсы для каждого тиристора.
37

Для этого добавить блок Selector (выбор) из раздела Signal Routing (маршрутизация сигналов), установить параметр Input port size (размер входного порта) равным 6, в колонке Index (индекс) установить число 1 для прямого тиристора фазы A, индекс 2 для встречного тиристора, индекс 4 для прямого тиристора фазы B, индекс 5 для встречного тиристора.
1.11.В момент времени, когда выходное напряжение УПП достигает своей максимальной величины (T), силовые тиристоры шунтируются с помощью контакторов.
Добавить в модель блок Breaker (разъединитель) из раздела Elements. Для замыкания контактора необходимо подать на его управляющий вход единичный сигнал. Для этого добавить блок Step, задать Step time равным T.
1.12.Чтобы не загромождать схему связями, для соединения блоков Step и Breaker использовать блоки From (от) и
Goto (до) из раздела Signal Routing.
1.13.Нагрузка для двигателя является постоянной и задается блоком Step. В этом блоке установить Step time 0.001 и Final value, рассчитанное по формулам ниже:
1.14.Собрать схему согласно рис. 3.3. Коэффициент усиления по выводу частоты вращения установить 1/(2*pi).
1.15.Установить углы отпирания тиристоров равными 60° и 40°, время T равным 0.3, время моделировании 0.7 с и запустить моделирование. Полученные графики представлены на рис. 3.4.
38

39
Рис. 3.3. Модель асинхронного электропривода с УПП