

Методическое пособие 637
.pdfБиблиотека Machines содержит четыре из наиболее часто используемых трехфазных машин: упрощенные и полные синхронные машины, асинхронные машины и синхронная машина с постоянными магнитами. Каждая машина может использоваться или в генераторном, или двигательном режимах. Скомбинированные с линейными и нелинейными элементами типа трансформаторов, линий, нагрузок, выключателей и т.д., они могут использоваться для моделирования электромеханических переходных процессов в электрической сети. Также они могут быть объединены с уст-
ройствами силовой электроники, чтобы моделировать приводы. Библиотека Power Electronics содержит блоки, позволяяющие моделировать диоды, тиристоры, GTO тиристоры,
MOSFET и IGBT устройства. Существует возможность связывать несколько блоков вместе, чтобы строить трехфазный мост. Например, для построения IGBT инверторной схемы понадобилось бы шесть IGBT и шесть встречно-параллельных диодов.
Чтобы облегчить моделирование мостовой схемы, существует стандартный блок Universal Bridge (универсальный мост), который уже содержит в своем составе необходимые элементы, соединенные вместе.
Методика проведения лабораторной работы
1. Построение модели асинхронного электродвигателя с широтно-импульсным управлением.
1.1.Открыть новое окно и сохранить его как circuit 1.
1.2.Открыть раздел Power Electronics (силовая электроника) библиотеки SimPowerSystems и скопировать блок Universal Bridge (универсальный мостовой преобразователь) в
модель circuit 1.
1.3.Открыть меню Universal Bridge и установить его параметры следующим образом:
– Power Electronic device (силовое электронное устрой-
ство): IGBT/Diodes (IGBT/диоды);
10
–Snubber (параметры демпфирующей цепочки): Rs=1e5 Ohms, Cs=inf; Ron=1e-3 Ohms;
–Tail (параметры постоянных времени (Tf – время спадания и Tt – время остатка для GTO или IGBT устройств)): Tf=1e-6 с; Tt=1e-6 с.
Поскольку значение емкости конденсатора snubber (демпфирующей цепочки) Cs было установлено в Inf (т.е. Cs – закорочен), используется чисто активное сопротивление snubber (демпфирующей цепочки). В общем случае, IGBT мостовые преобразователи не используют snubbers (демпфирующие цепочки). Однако, так как каждый нелинейный элемент в SimPowerSystems смоделирован как источник тока, необходимо обеспечить параллельный путь протекания тока в обход каждого устройства IGBT, чтобы была связь для индуктивной цепи (статор асинхронной машины). Высокое значение сопротивления демпфирующей цепочки не будет влиять на работу схемы.
1.4.Открыть библиотеку Machines (машины). Скопи-
ровать блок Asynchronous Machine SI Units (асинхронный дви-
гатель с системой единиц СИ), а также скопировать Machines Measurement Demux (блок измерения и разделения параметров двигателей) в модель circuit 1.
1.5.Открыть свойства блока Asynchronous Machine SI Units и выбрать параметр Preset Model (предустановленная мо-
дель) 01: 5 HP 460 V 60Hz 1750 RPM.
1.6.В течение всего нормального двигательного режима три клеммы ротора a, b и c асинхронного двигателя должны быть накоротко замкнуты вместе. Для этого в параметрах блока
Asynchronous Machine SI Units параметр Rotor Type (тип рото-
ра) установить Squirrel Cage (беличья клетка).
1.7.Открыть меню блока Machines Measurement Demux. Если этот блок связан с выходом m_SI блока ASM (Asynchronous Machine SI Units), то необходимо обращаться к определенным внутренним сигналам ASM. Параметр Machine type (тип двигателя) установить Asynchronous (асинхронный). Снять флажки со всех сигналов, кроме следующих трех: ia, ib,
11

ic (три тока статора), wm (скорость ротора) и Te (электромагнитный вращающий момент).
1.8. Необходимо задать нагрузочную характеристику двигателя: вращающий момент в функции скорости двигателя. При квадратичной характеристике вращающего момента в функции скорости двигателя (т.е. вентиляторная или насосная нагрузка), вращающий момент T пропорционален квадрату скорости ω.
T k 2
Номинальный вращающий момент двигателя:
3 746 T 11.87Н м
ном |
188.5 |
|
Поэтому, постоянная k должна равняться
k Tном 11.87 3.34 10 4c2 188.52
В библиотеке Simulink открыть раздел User-Defined Functions (функции, определяемые пользователем) и скопировать блок Fcn в модель circuit 1. Открыть меню этого блока и ввести выражение для вращающего момента в функции скоро-
сти 3.34e-4·u^2.
1.9.Соединить вход блока Fcn с выходом скорости блока Machines Measurement Demux с названием wm, а выход –
свходом вращающего момента двигателя с названием Tm.
1.10.Открыть библиотеку Electrical Sources (электрические источники) и скопировать блок DC Voltage Source (источник постоянного напряжения) в модель circuit 1. Открыть меню блока и установить напряжение – 400 В.
1.11.Открыть библиотеку Measurement (измерения) и скопировать блок Voltage Measurement (вольтметр) в модель circuit 1. Переименовать этот блок в Vab.
12

1.12.Скопировать блок Ground из библиотеки Elements (элементы) и заземлить силовые элементы и источник напряжения как показано на рис. 1.2.
1.13.Чтобы управлять мостовым инвертором необходим генератор импульсов, который формирует управляющие импульсы на силовые ключи. Такой генератор доступен в библиотеке Extra Library (дополнительное оборудование).
В библиотеке SimPowerSystems открыть раздел Extra Library, в нем Discrete Control blocks (дискретные управляющие блоки) и скопировать Discrete PWM Generator (дискретный ШИМ генератор) в модель circuit 1. Подключить его выход
Pulses (импульсы) ко входу Pulses блока Universal Bridge.
1.14.Открыть меню блока Discrete PWM Generator и ус-
тановить параметры следующим образом:
– Generator Mode (режим генератора): 3-arm bridge
(6pulses) (трехфазный мост);
– Carrier frequency (несущая частота): 1080 Гц;
– Sample time (типовое время): 10e-6 с;
– Internal generation of modulating signal (внутренняя вы-
работка модулированного сигнала): отмечено (галочка);
– Modulation index m (показатель модуляции): 0.9;
– Frequency of output voltage (частота выходного напря-
жения): 60 Гц;
– Phase of output voltage (фаза выходного напряжения): 0 degrees (градусов).
1.15.В общем метод генерации PWM импульсов используется сравнение выходного напряжения, чтобы синтезировать треугольные импульсы (частотой 60 Гц в нашем случае)
взначение частоты переключения (1080 Гц в нашем случае). Этот метод используется в Discrete PWM Generator (дискретном PWM генераторе). Межфазное выходное напряжение (rms) – функция постоянного входного напряжения и коэффициента модуляции m, как задано следующим уравнением:
V |
m |
|
|
3 |
|
V |
m 0.612 V |
|
|
|
|
||||
LLrms |
2 |
|
|
2 |
|
dc |
dc |
|
|
|
|
|
|
13
Согласно данной формуле, при постоянном напряжении 400 В и коэффициенте модуляции 0.90 межфазное напряжение равно 220 В (rms), что является номинальным напряжением асинхронного двигателя.
1.16.Необходимо добавить блоки, измеряющие основную составляющую (60 Гц), входящую в несинусоидальное напряжение Vab и в ток фазы А.
Открыть библиотеку Extra Library, раздел Measurements
ископировать блок Fourier (Фурье) в модель circuit 1. Открыть меню блока Fourier и установить параметры следующим образом:
– Fundamental frequency (Основная частота) f1: 60 Гц;
– Harmonic number (номер гармоники): 1.
Подключить ко входу Fourier выход вольтметра Vab.
1.17.Чтобы измерять ток фазы А необходимо подключить блок Fourier к первому элементу выхода is_abc ASM Measurement Demux.
Скопировать блок Selector (переключатель) из библиотеки Signal Routing (маршрутизация сигналов) Simulink. Скопировать блок Fourier. Подключить выход блока Selector ко входу второго блока Fourier, а его вход к выходу is_abc блока
Machines Measurement Demux, как показано на рис. 1.2.
1.18.Чтобы отобразить мгновенное напряжение двигателя, мгновенные токи, скорость и электромагнитный момент необходимо использовать блок Scope (осциллограф).
Скопировать блок Scope из раздела Sinks (приемники)
библиотеки Simulink в модель. В меню Scope Properties/General,
установите следующие параметры:
– Number of axes (число графиков): 4;
– Time range (временной интервал): 0.05 с;
Подключить четыре входа и маркировать четыре линии связи согласно передаваемым сигналам: Vab, is_abc, wm, Te. Когда вы запустите моделирование, эти метки будут отображены на вершине каждого графика.
1.19.Скопировать Scope с четырьмя входами и заменить число входов на два. Этот Scope будет использоваться, чтобы отобразить основную гармонику напряжения Vab и тока Ia.
14

Подключить два входа осциллографа к выходам двух блоков Fourier. Промаркировать две линии связи Vab и ia соответственно.
2. Моделирование ШИМ электропривода с непрерывным алгоритмом интегрирования.
2.1. Открыть меню Simulation/Configuration Parameters (моделирование/параметры). Выбрать алгоритм интегрирования ode23tb. Установить relative tolerance (относительную погрешность) – 1e-4, absolute tolerance (абсолютную погрешность) и Max step size (максимальный размер шага) – auto, stoptime (время окончания расчета) – 1с. Запустить моделирование. Результаты моделирования представлены на рис. 1.3.
Через 0.5 с после старта двигателя его скорость достигает установившегося значения – 181 рад/с (1728 оборотов в минуту). При пуске двигателя на частоте 60 Гц величина пускового тока достигает 90 ампер (64 ампера – действующее значение), а установившееся значение тока – 10.5 ампера (7.4 ампера
– действующее значение). Амплитуда основной гармоники с частотой 60 Гц, содержащейся в напряжении:
220  2 311В
2 311В
Также при пуске наблюдаются сильные колебания электромагнитного момента. Если изменить масштаб изображения на графике для электромагнитного момента в установившемся режиме, то можно наблюдать сигнал статического момента, со средним значением 11.9 Н·м, передающийся при установившемся значении скорости.
Если изменить масштаб изображения для трех токов двигателя, то можно увидеть, что все гармоники (получаемые при частоте переключения 1080 Гц) отфильтрованы индуктивностью статора так, что доминирующей стала составляющая с частотой 60 Гц.
15
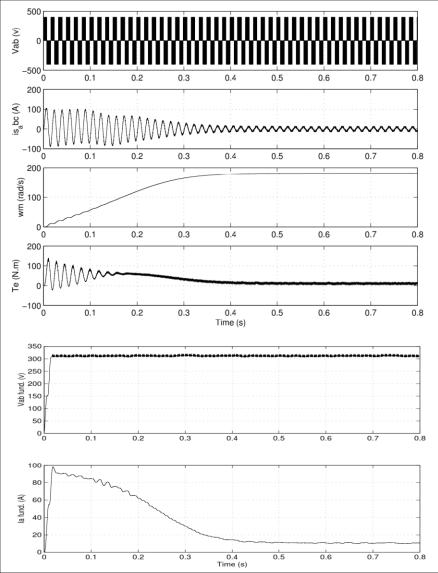
Рис. 1.3. Электропривод с ШИМ управлением. Результаты моделирования для пуска двигателя при номинальном напряжении
16
Использование блока Multimeter (мультиметр).
Блок Universal Bridge – подсистема, где доступны все шесть индивидуальных ключей. Для того, чтобы измерить разность потенциалов ключа или его токи, необходимо использовать блок Multimeter (мультиметр), который дает доступ к внутренним сигналам блока Universal Bridge.
2.2.Открыть диалоговое окно Universal Bridge и установить параметр Measurement (измерения) на Device currents (токи устройства).
2.3.Скопировать блок Multimeter (мультиметр) из
Measurements library (библиотеки измерений) в схему circuit 1.
Щелкнуть два раза на блоке Multimeter. Появится окно, в котором необходимо выбрать два тока моста, связанных с фазой A.
Они показаны как: iSw1: Universal Bridge, iSw2: Universal Bridge.
2.4.Щелкнуть по кнопке Close (закрыть). Число сигналов (2) появится на иконке мультиметра.
2.5.Используя блок Demux, соединить два выходных сигнала блока Multimeter с двумя входами блока scope и обозначить эти две линии связи как показано на рис. 1.2 (линия 1: iSw1, линия 2: iSw2).
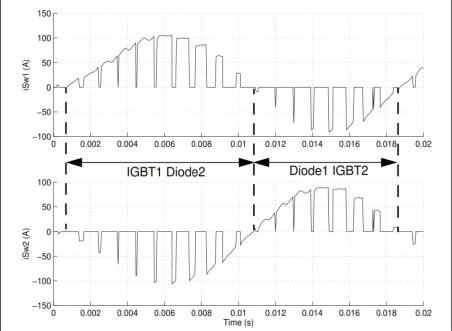
2.6.Повторно запустить моделирование. Графики тока, полученные для первых 20 мс, представлены на рис. 1.4.
Токи в ключах 1 и 2 комплементарны. Ток положительной величины течет через IGBT, ток отрицательной величины течет через антипараллельный диод.
Примечание. Использование блока Multimeter не ограничивается применительно к блоку Universal Bridge. Все элементы разделов Electrical Sources (электрических источников) и Elements (элементов) библиотеки SimPowerSystems имеют параметр Measurement (измерения), где имеется возможность выбрать voltages (разность потенциалов), currents (токи) и saturable transformer fluxes (потоки насыщающихся трансформаторов). Разумное использование блока Multimeter уменьшает
17
число измерителей тока и разности потенциалов в схеме, делая её проще для дальнейшего исследования.
Рис. 1.4. Графики изменения токов ключей универсального моста
3. Дискретизация электропривода с PWM (широтноимпульсным) управлением.
Моделирование, основанное на алгоритме, использующем переменный шаг интегрирования, происходит относительно долго. Чтобы сократить время моделирования, необходимо дискретизировать систему и вести расчет, используя постоянный шаг интегрирования.
3.1. Открыть параметры блока powergui, на вкладке
Configure parameters (настройка параметров) в строке Simulation type (тип моделирования) выбрать Discrete (дискретный) и установить sample time (типовое время) равное 10e-6 с.
18
3.2.Поскольку система содержит два блока, которые содержат непрерывные состояния (блоки Fourier (Фурье)), необходимо использовать метод расчета с непрерывным интегрированием.
В меню Simulation/ Parameters/ Solver (моделирование/ параметры/ решатель), выбрать опцию Fixed-step (Euler) (фиксированный шаг (Эйлер)) и определить Fixed-step (фиксированный шаг) равный 10 мс.
3.3.Запустить моделирование. Моделирование теперь происходит приблизительно в три раза быстрее по сравнению с непрерывной системой. Результаты хорошо сопоставимы с результатами, полученными для непрерывной системы.
3.4.Сохранить и проанализировать полученные
графики.
Лабораторная работа № 2
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ В СТАТИЧЕСКИХ КОМПЕНСАТОРАХ ДЛЯ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ
Теоретические сведения
В условиях современной экономической ситуации на муниципальных, коммунальных и промышленных предприятиях и организациях ведется непрерывный контроль расхода электроэнергии, оборудован ее коммерческий входной учет, на распределительных устройствах для крупных внутренних потребителей и на местах потребления установлены электросчетчики. Система электроснабжения объектов проектируется в соответствии с требованиями и нормами ПУЭ, ПТЭ и ПТБ, при этом закладывается выполнение условий энергетической экономичности и безопасности.
Сокращение или наращивание объемов выпуска продукции на промышленных предприятиях ведет к тому, что сис-
19