

Методическое пособие 637
.pdf50
Рис. 4.2. Физическая модель тиристорного регулятора переменного напряжения

|
Система |
|
|
|
Блок |
220 В 50 Гц |
входных |
|
|
T1 |
моделирования |
|
защит |
|
|
||
|
|
|
|
нагрузок |
|
|
T5 |
T4 |
T3 |
T2 |
|
|
ВИП |
НО3 |
НО2 |
НО1 |
|
51 |
|
|
|
|
|
|
|
|
|
Управляющий МК |
|
|
|
|
|
UART |
ADC |
|
|
|
|
|
|
|
|
|
|
CPU |
|
|
|
USB-RS485 |
|
|
Interrupts |
|
|
|
|
|
|
|
|
|
|
|
IO |
Рис. 4.3. Структурная схема программно-технического комплекса |
|||||
Система управления построена таким образом, что осуществляет переключение первичной обмотки трансформа-тора
водно из двух состояний:
1)короткое замыкание. В этом случае напряжение нагрузки равняется напряжению сети;
2)включена в сеть 220 В, 50 Гц. В этом случае напряжение нагрузки равно сумме напряжения сети и напряжения вторичной обмотки трансформатора, то есть осуществляется режим «вольтодобавки».
Контроль текущего состояния схемы производится с помощью измерительных трансформаторов, контролирующих напряжение на тиристорных группах и напряжение в сети.
Управление схемой осуществляется с помощью программируемого микроконтроллера ATMEGA32. На основе сигналов с нуль-органов, поступающих на входы внешних прерываний, сигнала с задатчика напряжения, поступающего на вход аналого-цифрового преобразователя (АЦП), и записанной в памяти МК программы управления происходит формирование управляющих сигналов на электроды тиристорных групп через оптическую гальваническую развязку (оптроны).
Рассмотрим более подробно алгоритм управления схемой. На рис. 4.4 приведены временные диаграммы напряжений сети и нагрузки, тока нагрузки, сигналов с нуль-органов, управляющих импульсов на отпирание тиристоров.
В момент времени t=0 происходит подключение ПТК и напряжение возрастает до напряжения сети. В это же время срабатывает нуль-орган (Uн.о.1) и МК формирует управляющий сигнал на отпирание тиристорной группы (Uу1). Напряжение на нагрузке равняется напряжению сети. Согласно программе управления, МК запускает системный таймер для отсчёта временной задержки отпирания тиристорной группы.
В момент времени t1 в МК срабатывает прерывание по таймеру задержки включения тиристоров и формируется управляющий сигнал на отпирание тиристорной группы (Uy2). Открывается тиристорная группа, в то время как вторая тиристорная группа оказывается под обратным напряжением и за-
52
пирается обратным током. Напряжение на нагрузке равняется сумме напряжения сети и напряжения вторичной обмотки.
Вмомент времени t2 напряжение сети проходит через ноль, срабатывают нуль-органы (Uн.о.1 и Uн.о.3), но ток нагрузки из-за индуктивного характера отстает и имеет положительное значение (Iнагр), не запирая тиристорную группу. Напряжение на нагрузке остается равным сумме напряжения сети
инапряжения вторичной обмотки.
Вмомент времени t3 ток нагрузки переходит через ноль, меняя полярность. Происходит запирание тиристорной группы. Срабатывает нуль-орган (Uн.о.2), в МК срабатывает внешнее прерывание по сигналу с нуль-органа и выдается управляющий сигнал на отпирание второй тиристорной группы (Uy1). Напряжение на нагрузке равняется напряжению сети. Согласно программе управления, МК запускает системный таймер для отсчёта временной задержки отпирания первой тиристорной группы. Таким образом, состояние схемы в момент времени t3 соответствует состоянию схемы в момент времени t1. Далее процессы в схеме протекают аналогичным образом.
На рис. 4.4 приведены временные диаграммы работы ПТК при значении угла отпирания α=π/4. Уменьшая угол с помощью задатчика напряжения до 0, действующее значение напряжения на нагрузке будет увеличиваться и достигнет значения Uнагр = Uсети+Uдоб. При увеличении угла отпирания до α=π напряжение на нагрузке будет уменьшаться и станет равно Uнагр = Uсети.
Вприведенном выше примере рассматривается использование в качестве потребителя активно-индуктивного характера нагрузки, что выражается в фазовом запаздывании тока нагрузки от напряжения и искажении формы напряжения нагрузки. Имеется возможность использовать чисто активную нагрузку, в этом случае напряжение и ток нагрузки будут совпадать по фазе, а момент времени t3 совпадёт по параметрам с моментом времени t2. Алгоритм функционирования ПТК останется без изменений и будет аналогичен рассмотренному выше.
53

Рис. 4.4. Временные диаграммы напряжений сети и нагрузки, тока нагрузки, сигналов с нуль-органов, управляющих импульсов на отпирание тиристоров
54
Следует выделить ряд важных особенностей рассматриваемой физической модели тиристорного регулятора напряжения.
Во-первых, данная модель универсальна. Она позволяет использовать в качестве нагрузки электроприёмники различных видов (осветительная аппаратура, электродвигатели переменного тока, нагревательные приборы) и мощностей.
Для обеспечения требуемой электрической мощности и диапазона регулирования напряжения имеется возможность подключения вольтодобавочных трансформаторов, различных по мощности и коэффициенту трансформации.
Во-вторых, применение микроконтроллера в качестве ядра системы управления открывает широкие возможности для настройки параметров регулятора, построения и отладки оптимального алгоритма управления, обеспечивающего максимальную энергоэффективность ПТК.
Также, использование микроконтроллера является целесообразным при условии включении данного ПТК в объединённую модель типового объединенного диспетчерского пункта, построенного по принципу Smart – структуры.
Основными задачами Smart – структуры являются исследование взаимосвязей потоков электрической и тепловой энергии при различных режимах потребления, позволяющих проводить оптимальное регулирование параметров сети с учётом потребительской нагрузки в режиме реального времени.
Функционирование таких систем невозможно без использования развитой вычислительной сети, включающей персональные компьютеры (ПК), микроконтроллеры и широкий набор модулей ввода/вывода, обеспечивающих сбор и распределение потоков информации. Усложнение технологических процессов и производств ставит задачи создания распределенных иерархических систем (АСУТП) и их сквозного программирования, что объясняет появление новых компьютерных технологий для интегрированных систем, объединяющих все уровни производства.
55
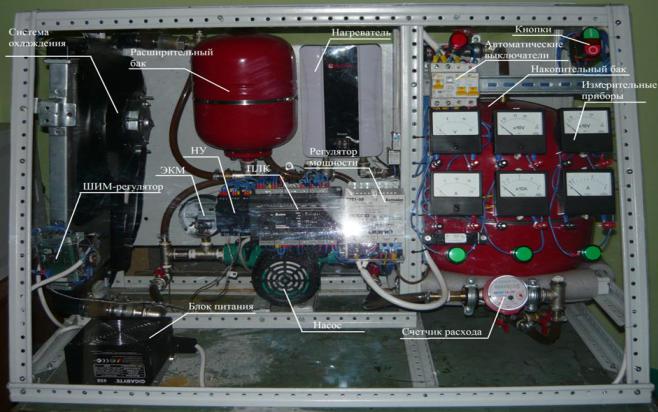
Для физического моделирования последних можно использовать второй лабораторный комплекс. Его внешний вид представлен на рис. 4.5. С его помощью можно моделировать все основные аппаратные составляющие современных электротехнических систем.
Так, в качестве примера может быть названа SCADA-
система. SCADA (аббр. от англ. Supervisory Control And Data Acquisition – диспетчерское управление и сбор данных) – программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью автоматической системы управления технологическим процессом (АСУТП), системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль над технологическими процессами в реальном времени.
Непосредственное управление процессами в физической модели обеспечивается программируемым логическим кон-
троллером (ПЛК) Delta Electronics DVP20EX2, а SCADA
управляет режимами работы. ПЛК имеет 8 дискретных входов, 4 аналоговых входа, 6 дискретных выходов, 2 аналоговых выхода. Имеется возможность подключения к контроллеру большого разнообразия модулей: процессорных, дискретных входов, дискретных выходов, измерения температуры, аналоговых входов/выходов. Скорость обновления состояния входов/выходов в DVP20EX2 значительно увеличена по сравнению с предыдущими моделями. Для обработки состояния одного входа или выхода требуется всего 5мкс.
56
57
Рис. 4.5. Внешний вид лабораторного стенда
DVP20EX2 может управлять частотными преобразователями и сервоприводами токовым или потенциальным аналоговым сигналом с выходов или модулей расширения. ПЛК имеет новые инструкции, специально предназначенные для управления по RS-485 приводами: FWD (прямое вращение), REV (обратное вращение), STOP (стоп), RSTEF (сброс), RDST (чтение состояния), ASDRW (чтение состояния, чтение/запись данных, управление скоростью и положением). Подавая сигналы с дискретных выходов DVP20EX2 на многофункциональные входы преобразователей частоты или сервопривода, можно обеспечить пошаговое управление.
Для программирования ПЛК используется новое программное обеспечение ISPSoft. Оно поддерживает языки LD, FBD и др. в соответствие с IEC61131-3.
Программируемый логический контроллер в ходе управления процессами выдает на выходы управляющие сигналы, которые характеризуются малой мощностью. Непосредственно микроконтроллер не позволяет управлять мощными потребителями напрямую, поэтому необходимо использовать дополнительное оборудование.
Наряду с преобразователями частоты в регулируемом асинхронном электроприводе используется тиристорный регулятор напряжения (ТРН). Он изменяет амплитуду напряжения, подводимого к статору, без изменения частоты и используется главным образом для управления пуском (устройства плавного пуска) и осуществления ряда других полезных функций.
Для регулирования мощности нагревателя, входящего в состав лабораторного стенда, используется регулятор мощности AutonicsSPC1. На примере данного регулятора возможно рассмотрение принципов функционирования тиристорного регулятора напряжения. Регулятор имеет различные способы задания мощности:
–токовый сигнал 4-20 мА;
–сигнал напряжения 1-5 В;
–внешний сигнал напряжения 24 В;
–внешний переменный резистор (1 кОм);
58

–внешняя контактная группа (вкл./выкл.). Среди функций регулятора имеются:
–подстройка (ограничение) выходной мощности;
–функция плавного пуска;
–световая индикация выхода;
–автоматическая адаптация к частоте сетевого напряжения 50/60 Гц.
AutonicsSPC1 использует различные способы регулирования, которые выбираются с помощью переключателя:
–регулирования изменением фазы (рис. 4.6);
–регулирование изменением количества полных периодов напряжения, передаваемых в нагрузку (коммутация при переходе через ноль) (рис. 4.7);
–двухпозиционное регулирование (коммутация при переходе через нуль) (рис. 4.8).
Рис. 4.6. Выходная мощность в зависимости от управляющего входа [18]
Рис. 4.7. Количество полных периодов напряжения в зависимости от управляющего входа [18]
59