

4. Предварительное задание
4.1. Изучить расположение органов управления на панели СУ-202М.
4.2. Ознакомиться с приемами программирования промышленного робота РФ-202М.
5. Рабочее задание
5.1. Составить программы работы робота по манипулированию заготовками, включающими две части: основную рабочую программу, предусматривающую штамповку заготовок, и дополнительную для работы робота при отсутствии заготовок на паллете (в данном случае возвращение проштампованных заготовок на паллету для передачи на склад) Номер основной программы – 1, номер дополнительной программы - 2. При составлении программ рекомендуется воспользоваться техническим описанием и инструкцией по эксплуатации.
5.2. Отключить (с помощью персонале) датчики очувствления, контролирующие наличие заготовок. Записать в память составленные программы. Запустить программу 1, проследить реакцию робота на отсутствие предметов манипулирования.
5.3. Определить местоположение, принцип работы датчиков очувствления. Определение местоположения датчиков производить при выключенном питании робота
5.4. Подключить (с помощью персонала) датчики очувствления. Изучить процесс функционирования робота, очувствленного по наличию заготовок. Отлаженные программы включить в отчет.
5.5. Объяснить преимущества, приобретаемые роботами при оснащении его средствами адаптации Полученные выводы включить в отчет.
6. Контрольные вопросы
6.1. Поясните преимущества очувствленного робота над неочувствленным.
6.2. Почему на Ваш взгляд, датчики очувствления размещены на технологическом оборудовании, а не на роботе?
6.3. Сколько сигналов технологического оборудования может воспринимать СУ-202М и сколькими единицами оборудования управлять?
6.4. Какие еще типы датчиков можно использовать для контроля наличия заготовок на паллете? Покажите их преимущества и недостатки.
6.5. Возможно ли осуществить останов робота при отсутствии заготовок на паллете и как это сделать?
6.6. Как осуществить переход управления на другую программу? Можно ли осуществить переход на разные программы в зависимости от условий работы?
6.7. Какова приоритетность программ при переходе управления с одной на другую?
Лабораторная работа №6
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ИНДУКЦИОННОГО ДАТЧИКА БЛИЖНЕЙ ЛОКАЦИИ
Цель работы
. Снять статические характеристики датчика для установленных вариантов размещения обмоток возбуждения.
. Экспериментально определить зависимость дальнодействия датчика от его параметров.
. Определить чувствительность сенсора к направлению углового и линейного перемещений.
Теоретические сведения
Для определения параметров объектов манипулирования в машиностроении (в том числе в робототехнических системах) широко используется вихретоковый контроль. Вихретоковый метод контроля обладает следующими положительными качествами: бесконтактность, малая зависимость результатов измерений от физических параметров рабочей среды, высокая надежность сенсоров, способных работать в экстремальных условиях. В робототехнических системах вихретоковый метод контроля используется для измерения линейных, осевых, радиальных и угловых смещений и перемещений, амплитуд и частот вибраций, обнаружения дефектов поверхности объектов манипулирования, а также при активном контроле параметров технологических операций, например, динамических в системе захват - инструмент (датчик) -обрабатываемая (сканируемая) деталь.
Основу вихретокового контроля объектов составляет закон электромагнитной индукции, в соответствии с которым интенсивность распределения возбужденных в контролируемом объекте вихревых токов зависит от его пространственных координат, геометрических и электромагнитных параметров. Вихревые преобразователи (ВТП) разделяют на две группы - параметрические и трансформаторные. В параметрических ВТП пропорционально измеряемым параметрам изменяются составляющие комплексного сопротивления обмотки (возбуждающая и измерительная обмотки совмещены). Такие датчики называют индуктивными сенсорами ближней локации. В трансформаторных ВТП, которые имеют отдельные возбуждающие и измерительные обмотки, выходным сигналом ВТП служит напряжение измерительной обмотки. Эти преобразователи обладают более высокой температурной стабильностью, чем параметрические. Включают трансформаторные ВТП обычно по дифференциальной схеме. Такие датчики называют индукционными сенсорами ближней локации.
При внедрении робототехнических систем первоочередное значение приобретает решение задач сопряжения исполнительных механизмов с основным технологическим оборудованием, для чего на предприятиях разрабатывается вспомогательное оборудование, а также используются различные сенсоры. В настоящее время серийно выпускается большое количество вихретоковых сенсоров - толщиномеры серии ВТ, дефектоскопы и структуроскопы типов ВД и ВС, виброметры типа ВВ и т.д. Следует подчеркнуть, что для измерения линейных, радиальных и угловых смещений находят применение специально спроектированные индукционные сенсоры.
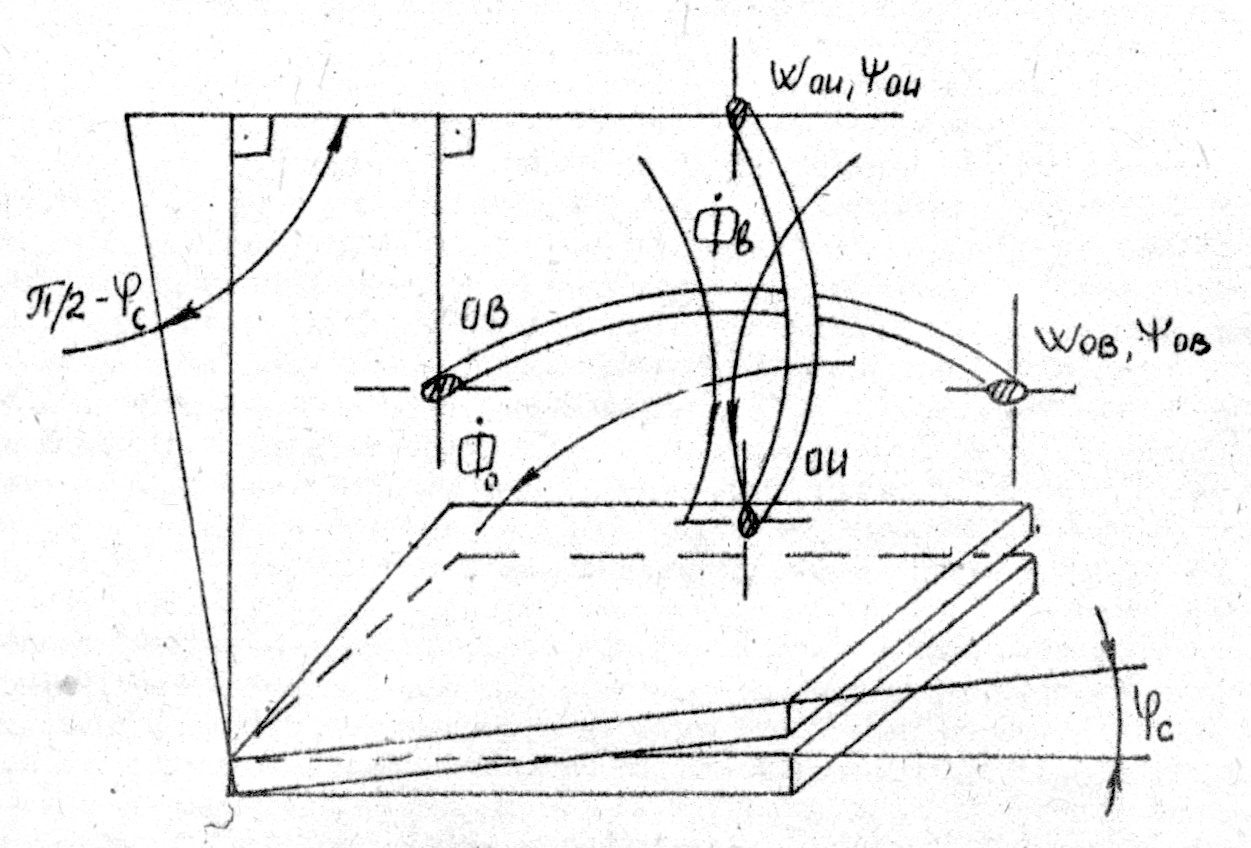
Контроль перекосов электропроводящих поверхностей осуществляется при помощи накладных преобразователей с ортогональными катушками (рис. 1). Возбуждающую катушку обычно располагают параллельно плоскости контролируемого объекта, а измерительную - перпендикулярно. По амплитуде напряжения измерительной катушки U определяют перекос (угол φ), а по фазе ψu его направление.
Рис. 1. Индукционный датчик угловых смещений |
Использование индукционного датчика ближней локации позволяет получить непрерывный сигнал, пропорциональный линейному перемещению. Рациональный выбор конструктивных и режимных параметров обеспечивает приемлемое дальнодействие датчика. Последнее повышает конкурентоспособность канала связи с индукционным датчиком линейных перемещений по сравнению с использованием ряда дискретных электромагнитных или фотоэлектрических сенсоров в системах, замкнутых по положению.
Применение двух обмоток возбуждения, размещенных в одной плоскости (рис. 2, 3), позволяет обеспечить инвариантность выходного сигнала к параметрам внешней среды (например, наличию ферромагнитных материалов в зоне измерений). При встречном включении первичных обмоток фаза выходного напряжения меняется на 180 градусов. На участке АБ (рис. 4) датчик чувствителен к перемещению, то есть дает возможность определять направление движения. В точке х=0 напряжение равно нулю, что важно для решения задачи точного позиционирования.
Расчет
напряжения измерительной обмотки
возможен на основе решения задачи по
теории поля, то есть при известных
законах распределения электрического
![]() и
магнитного
и
магнитного
![]() векторных
потенциалов в зоне измерений. С точки
зрения инженерной практики наиболее
рациональным является решение данной
задачи методом физического моделирования.
векторных
потенциалов в зоне измерений. С точки
зрения инженерной практики наиболее
рациональным является решение данной
задачи методом физического моделирования.