

2. Теоретические сведения
2.1. Точность и надежность робототехнических систем в значительной степени зависят от устройств, регистрирующих координаты подвижных органов и объектов. Различают два класса таких устройств: датчики положения и измерители перемещения. Среди датчиков положения наиболее надежными являются бесконтактные датчики: генераторные, индуктивные, емкостные, магнитогерконовые и фотореле. Они не имеют механического контакта с подвижным объектом, положение которого контролируется, поэтому отсутствует механический износ и электрическая эрозия, свойственная контактным аппаратам. Благодаря полной герметизации эпоксидными компаундами бесконтактные датчики надежно защищены от влияния внешней среды.
Генераторные датчики отличаются компактностью, высокой точностью к могут использоваться при повышенной концентрации влаги и пыли. Промышленностью выпускаются датчики двух типов: щелевые (серия КВД, БК-А) и плоскостные (серия КВП). Элементы электрической схемы датчика размечены в герметическом корпусе из ударопрочной пластмассы.
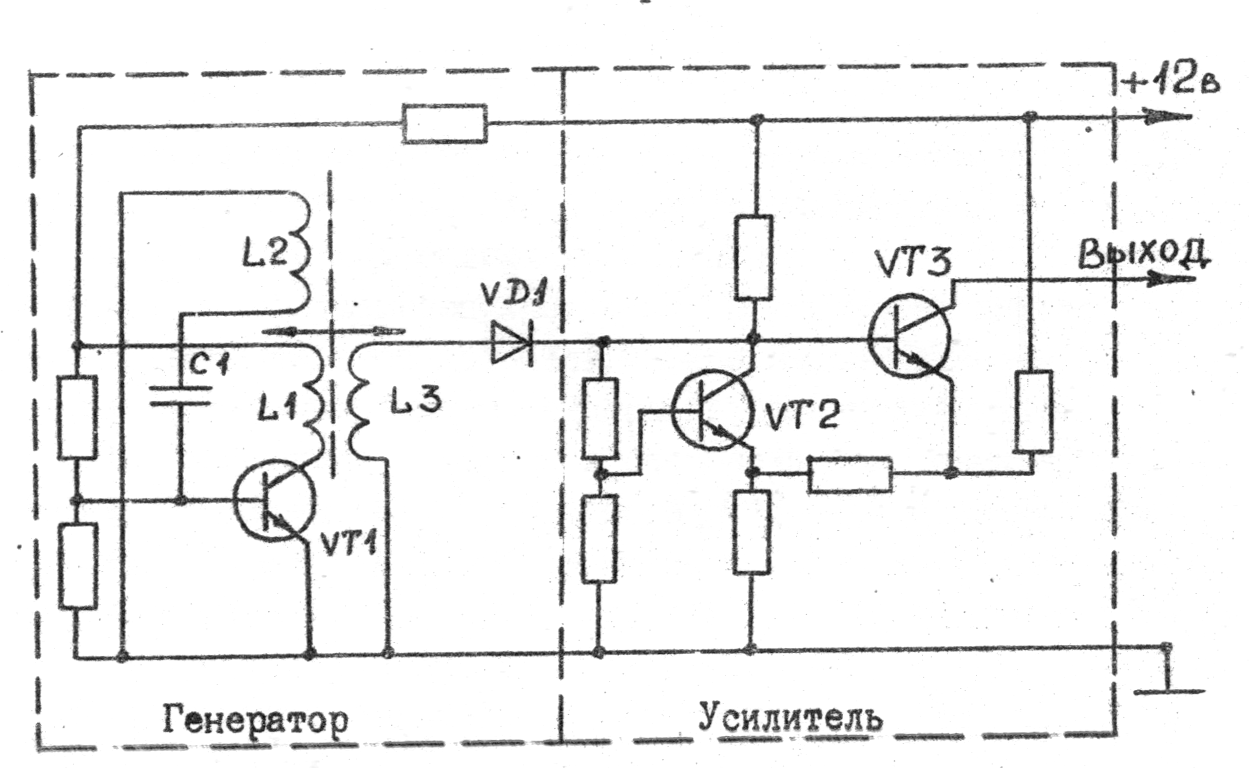
Схема датчика (рис. 1) включает в себя два узла - генератор и усилитель. Генератор колебаний собран на транзисторе VT1 . В цепь базы включен колебательный контур; L2 -С1. Катушка обратной связи L1 подключена между коллектором и источником питания Еп . Усилитель выполнен на транзисторах VT2, VT3 по схеме триггера Шмитта. При отсутствии металлической пластины (в дальнейшем просто пластины) в щели между обмотками L1 и L2 датчика схема генерирует высокочастотные колебания. Ток, трансформируемый в катушку L3 , выпрямляется диодом VD1 и поддерживает транзистор VT2 в открытом состоянии. Выходной транзистор VТЗ усилителя при этом закрыт. При введении пластины в щель датчика уменьшается коэффициент обратной связи, это вызывает срыв генерации. Выходной транзистор VТЗ открывается, и через нагрузку протекает ток. Плоскостной датчик устроен аналогично и срабатывает при прохождении мимо него пластины на расстоянии до 16 мм. В другом типе датчиков (серия БВК) используется противоположный эффект. При отсутствии переключающей пластины в щели между ферритовыми сердечниками генератор не возбуждается. При введении пластины возникает генерация и появляется выходное напряжение. Переключающая пластина может быть изготовлена из любого электропроводного материала, например, алюминия.
Рис. 1. Схема генераторного датчика |
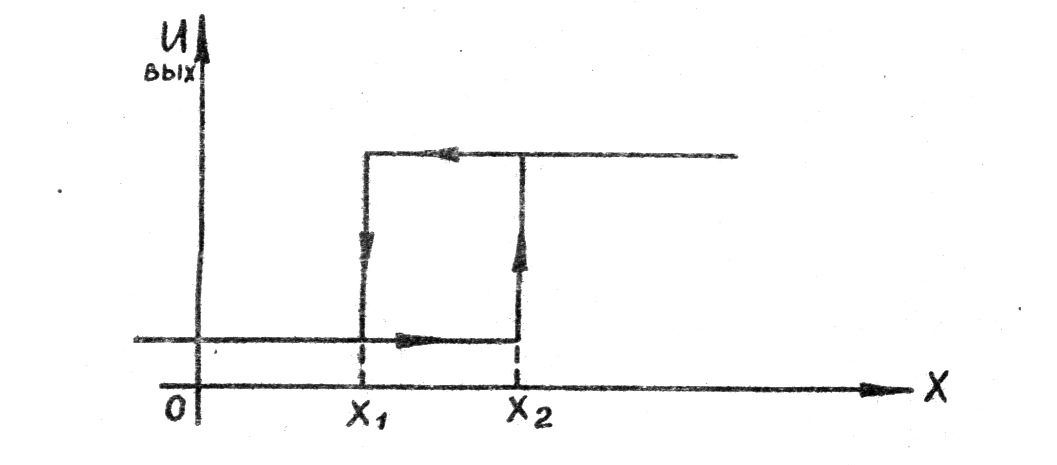
Статическая характеристика (рис. 2) генераторного датчика имеет релейный характер. Разность между координатой срабатывания и отпускания Х2-XI (гистерезис), составляет 0,5-2 мм у датчиков с шириной щели до 6 мм и 5-15 мм у датчиков с шириной цели 25-100 мм. Основная погрешность генераторных датчиков составляет, + 0,15-0,5 мм.
Рис. 2. Статическая характеристика генераторного датчика |
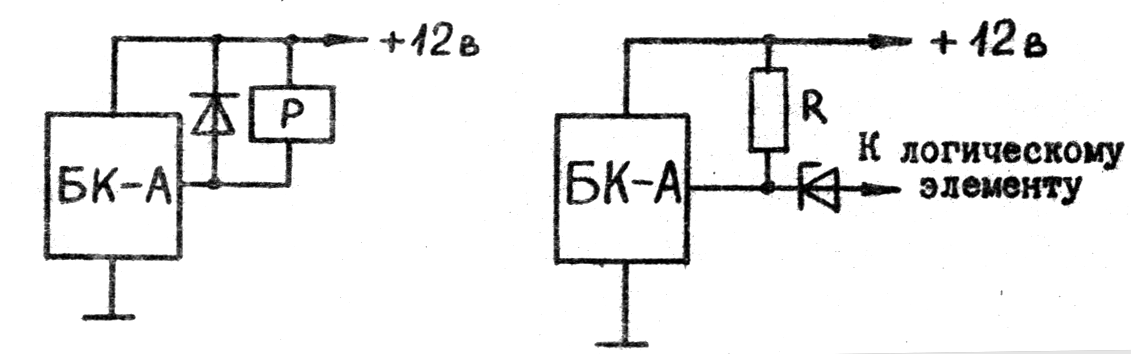
Динамическая характеристика генераторного датчика определяется в основном добротностью колебательного контура L2, С1 и частотой колебаний. Как правило, частота составляет 50-100 кГц, а время срабатывания датчика равно 100-500 мкс Необходимо отметить, что для надежной работы датчика следует выдерживать требуемые заглубление пластины для щелевого датчика и зазор для плоскостного датчика. На рис. 3 приведены схемы включения датчика в случае работы на обмотку реле и логический элемент.
Рис. 3. Схемы включения датчика |
2.2. В лабораторной работе используется промышленный робот "БРИГ-10Б-МК" с устройством циклового программного управления (УЦПУ) типа "УЦМ-30". Механизмы робота приводятся в движение пневмоприводами. Позиционирование исполнительных органов осуществляется механическими упорами. Для уменьшения ударных нагрузок и вибраций при торможении предусмотрены гидродемпферы. В составе робота используются 6 генераторных датчиков типа КВД-6М, которые выполняют роль конечных выключателей для механизмов подъема, поворота и выдвижения руки. При отработке заданной программы, в момент подхода исполнительного органа к механическому упору соответствующий датчик вырабатывает сигнал, который информирует УЦПУ об окончании перемещения. УЦПУ отключает данный пневмопривод, к система переходит к следующему кадру программы. Для правильной настройки робота предусмотрена механическая регулировка положения датчиков.