

Лабораторная работа № 2 Модели в переменных состояния
В
SISO
Design
Tools
– проектирование систем регулирования
с использованием графического интерфейса
анализа одномерных линейных
(линеаризованных) систем управления
(Single
Input/Single Output).
LTI –
непрерывная
система
(Linear
Time Invariation)
MIMO –
Multiplay
Input/Multiplay Output
1. Наибольшее распространение получил первый способ, который дает наилучшую точность при вычислениях и в большей степени удобен при теоретических исследованиях и практической реализации алгоритмов управления с применением вычислительных машин и т. д.
При применении этого способа дифференциальные уравнения, описывающие динамику системы, имеют вид:
![]() Ax+Bu
(2.1)
Ax+Bu
(2.1)
где х — n-мерный вектор состояния системы (вектор фазовых координат), u — р-мерный вектор внешних воздействий, состоящий из заданных величин, возмущений, управлений, формируемых регулятором, А и В — переходная матрица системы и матрица управлений соответствующих размеров. Предполагается, что измерению доступна только часть состояний системы или их линейных комбинаций, такие переменные у называются выходами системы:
у = Сх + Du (2.2)
где у — m-мерный выходной вектор, C, D — матрицы соответствующих размеров. Для большинства реальных объектов управления D = 0.
В рассматриваемых пакетах расширения имеется возможность манипулировать с системой, описываемой уравнениями как с одним объектом МАТLАВ. Для этого нужно матрицы А, В, С, B трансформировать в систему, используя команды ss.
2. Передаточная функция (tf) имеет вид
![]() (2.3)
(2.3)
3. ZPK модель имеет вид
 (2.4) Далее
в качестве примера с использованием
метода переменных состояния рассмотрим
RCL
цепь.
(2.4) Далее
в качестве примера с использованием
метода переменных состояния рассмотрим
RCL
цепь.
Дана цепь (см. рис. 2.1) Состояние системы характеризуется двумя переменными (x1,x2), где x1 — есть напряжение на конденсаторе uc(t), и х2 — ток через индуктивность iL(t).
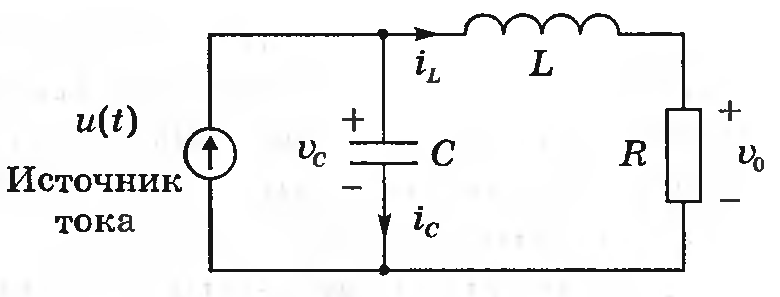
Рис. 2.1
Используя закон Кирхгофа для токов, запишем дифференциальное уравнение, для токов определяющее скорость изменения напряжения на конденсаторе
![]() (2.5)
(2.5)
Следовательно,
![]()
![]()
![]() ,
где iL(t)
– x2
,
звездочка знак производной. Закон
Кирхгофа для напряжений, примененный
к правому контуру, дает уравнение,
определяющее
скорость изменения тока через
индуктивность:
,
где iL(t)
– x2
,
звездочка знак производной. Закон
Кирхгофа для напряжений, примененный
к правому контуру, дает уравнение,
определяющее
скорость изменения тока через
индуктивность:
![]() -
-![]() ,
(2.6)
,
(2.6)
Следовательно,
![]()
![]() ,
где
,
где
![]() -
x1
-
x1
Выход системы определяется линейным алгебраическим уравнением
![]() (2.7)
(2.7)
Уравнения 5 и 6 можно переписать в виде двух дифференциальных уравнений относительно двух переменных состояния x1 и х2.
![]()
![]() =
-
=
-![]() (2.8)
(2.8)
![]() -
-
![]() (2.9)
(2.9)
Тогда выходной сигнал будет равен
![]() (2.10)
(2.10)
Используя уравнения 8 и 9, а так же начальные условия мы можем определить будущее поведение системы и ее выходную величину.
Воспользовавшись уравнениями 8 и 9 запишем уравнение состояния RCL-цепи
 (2.11)
(2.11)
Уравнение выхода будет иметь вид:
![]() (2.12)
(2.12)
Если R=3, L=1, C=1/2, то
 и
и
![]()
Теперь создадим систему с использованием команды ss. Создадим m – файл. В командном окне MATLAB последовательно откроем окна File, New, M-file (Script в версии R2010b) и введем текст (комментарии можно не вводить, комментарии начинаются со знака %):* ^
сlear % очистка рабочей области памяти
clc % очистка командного окна
R=3.0 % Ohms
L=1.0 % Henry
C=1/2 % Farad
Далее создадим матрицу A
A = [0 -1/C; 1/L –R/L ]% создание матрицы А
B = [1/C; 0]%создание матрицы B
C = [0 R] % создание матрицы C;
D = [0]
sys_1=ss(A, B, C, D)

Рис. 2.2
Отметите внимание на следующее: Матрицы можно вводить как одну текстовую строку, причем строки матрицы отделяются друг от друга точкой с запятой, а отдельные элементы строки матрицы разделяются пробелами. Если требуемая длина текстовой строки превышает ширину страницы, то можно переносить ее на следующую строку, причем в месте разрыва должны
быть поставлены точки, не менее трех. Если после команды имеется точка с запятой, то результаты выполнения команды в командном окне не появляются. Если выполнить эту программу (в окне редактора выполнить Debug и Run или Save and Run), то результат запоминается в рабочей области Workplace). Если теперь открыть ее (в окне МАТLАВ выполнить Desktop затем Workplace), то появится содержание рабочей области с одним среди прочих объектом sys. Рекомендуем сохранять М-файл:С:\Documents and Setting.

Рис. 2.3
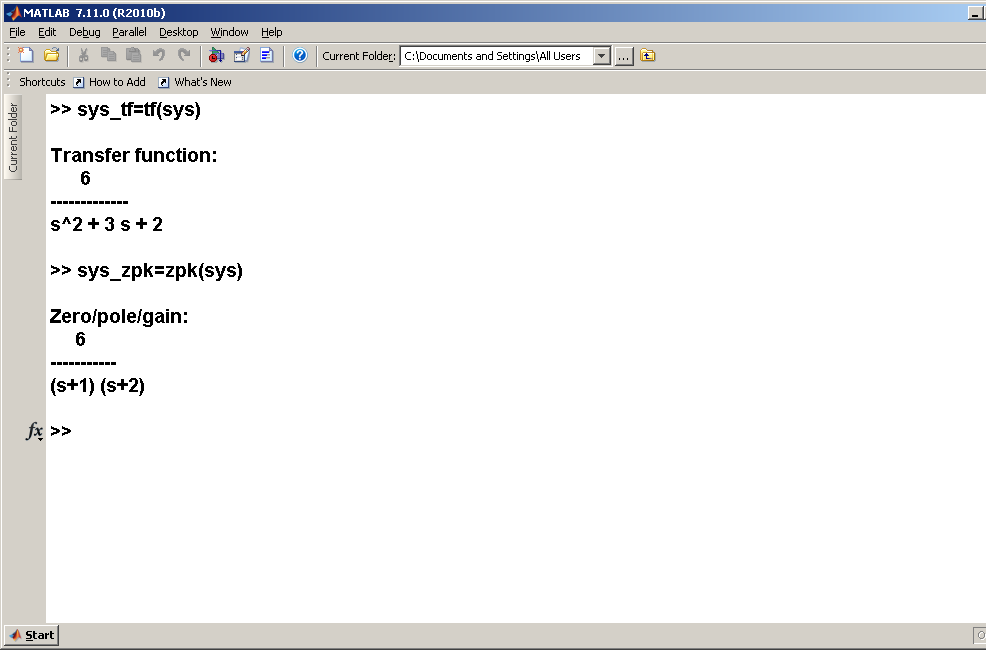
Рис. 2.4
Итак, посмотрим результат работы нашего примера, а именно расчет элементов матриц A, B, C и D и с использованием созданного нами М-файла. Закроем и вновь откроем Matlab. Получим такую картину
Для закрытия Editor:
File-Close Editor.
Напомним, как вводится традиционная передаточная функция в виде отношения полиномов.
Задана передаточная функция САУ:
.
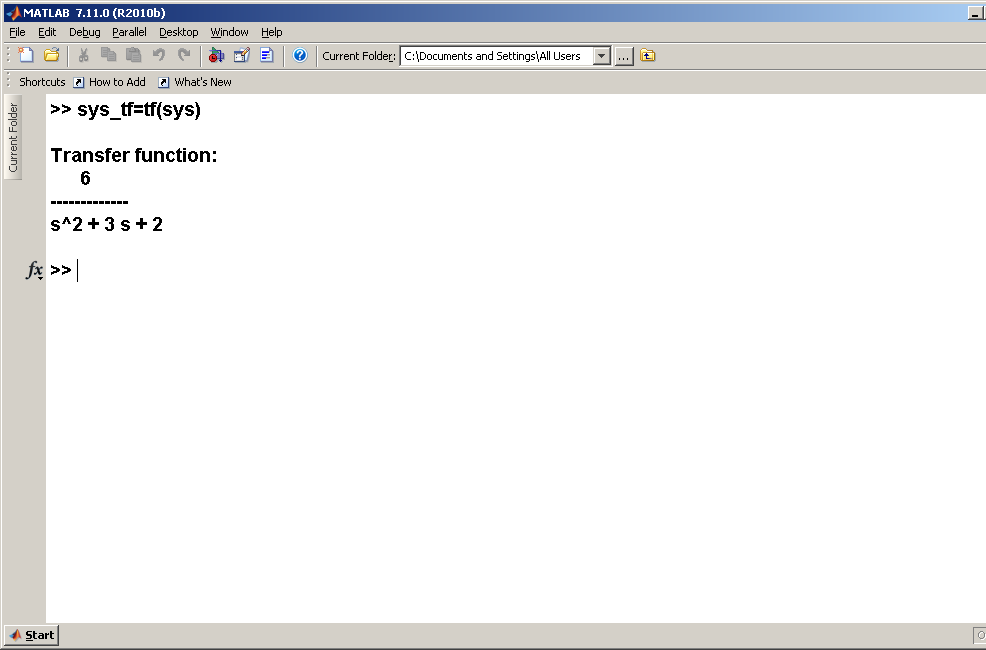
Рис. 2.5
Создадим LTI-объект с именем w, для этого выполним:
Выполним конвертацию LTI- объекта заданного в переменных состояния с использованием команды
>>sys_tf=tf(sys)
Так же выполним конвертацию ZPK- функции из моделей в переменных состояния >>sys_zpk=zpk(sys).
На рис. 2.6 показана схема преобразования двух видов: функция ss позволяет перейти к передаточной к представлению в пространстве состояний, функция tf выполняет обратную задачу. Смысл этих функций представлен на рис. 2.6.
Рассмотрим альтернативные варианты задания и преобразований передаточной функции в переменные состояния.
Например, имеется система третьего порядка
![]()
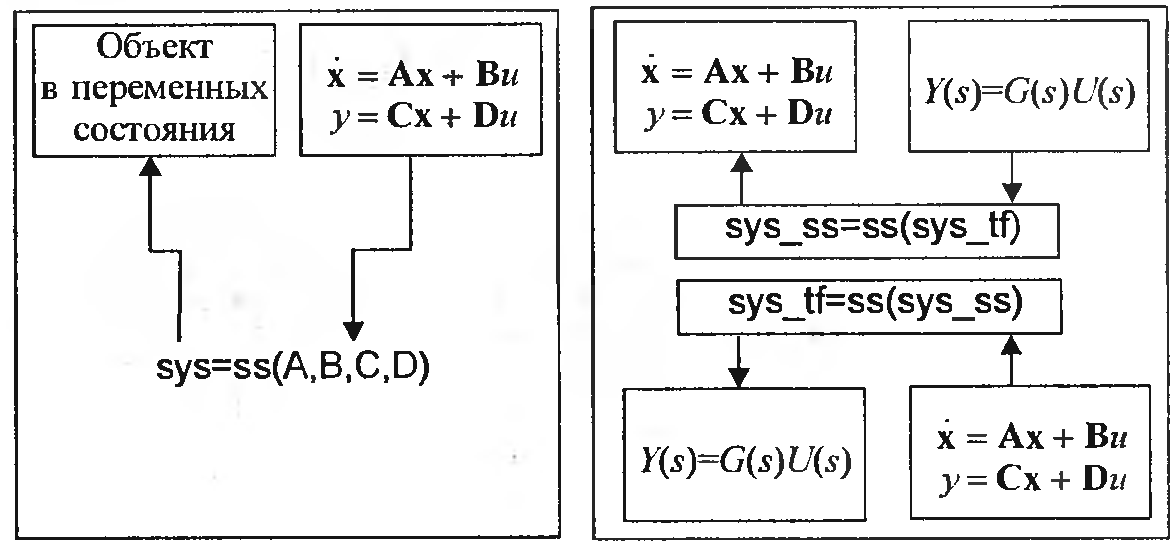
Рис. 2.6
На рис. 2.7 показано, как с помощью функции ss происходит переход от передаточной функции к описанию системы управления Ax+Bu и у = Сх + Du, где
А= ,
B=
,
B=![]() , C=[1
0,5 0,375] D=[0]
.
, C=[1
0,5 0,375] D=[0]
.
Обратите внимание на альтернативное задание числителя (num) и знаменателя (den).
На основе функций представленных в таблице:
Постройте графики данного примера (например, step(sys))
Постарайтесь сделать тоже самое с использованием LTI-viewer

Рис. 2.7
Синтаксис |
Описание |
pole(<LTI-объект>) |
Вычисление полюсов передаточной функции |
zero(<LTI-объект>) |
Вычисление нулей передаточной функции |
step(<LTI-объект>) |
Построение графика переходного процесса |
impulse(<LTI-объект>) |
Построение графика импульсной переходной функции |
bode(<LTI-объект>) |
Построение логарифмических частотных характеристик диаграммы Боде |
nyquist(<LTI-объект>) |
Построение частотного годографа Найквиста |