

390 |
H. Wei and M. Bartels |
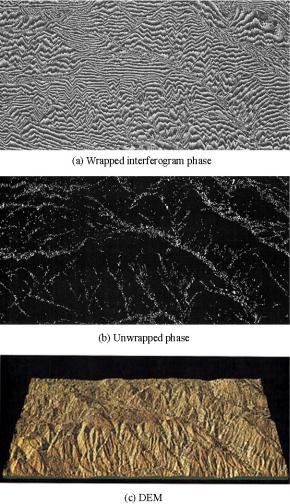
Fig. 9.10 InSAR generated DEMs from a pair of ERS-1 SAR images of a mountainous region of Sardinia, Italy. Figure courtesy of [37]
9.4 DEM Generation from LIDAR
9.4.1 LIDAR Data Acquisition
Airborne Laser Scanning (ALS) or LIght Detection And Ranging (LIDAR) has revolutionized topographic surveying for fast acquisition of high-resolution elevation data, which has enabled the development of highly accurate 3D products. LIDAR was developed by NASA in the 1970s [3]. Since the early 1990s, LIDAR has made significant contributions to many environmental, engineering and civil applications. It is being used increasingly by the public and commercial sectors [108] for forestry, archeology, 3D city map generation, flood simulations, coastal erosion monitoring,
9 3D Digital Elevation Model Generation |
391 |
Fig. 9.11 LIDAR acquisition principle
landslide prediction, corridor mapping and wave propagation models for mobile telecommunication networks.
From an airborne platform, a LIDAR system estimates the distance between the instrument and a point on the surface by measuring the time for a round-trip of a laser pulse, as illustrated in Fig. 9.11. Differential Global Positioning System (DGPS) and Inertial Navigation System (INS) complement the data with position and orientation, respectively [78]. The result is the collection of surface height information in the form of a dense 3D point cloud. LIDAR is an active sensor which relies on the amount of backscattered light. The portion of light returning back to the receiver depends on the scene surface type illuminated by the laser pulse. Consequently, there will be gaps and overlaps in the data which is therefore not homogeneously and regularly distributed [14]. Additionally, since LIDAR is an active sensor and is independent of external lighting conditions, it can be used at night, a great advantage compared to traditional stereo matching [93]. Typical flight heights range from 600 m to 950 m [14, 81], scan angles 7–23◦, wavelengths 1047–1560 nm, scan rates 13–653 Hz, and pulse rates 5–83 kHz [25, 78]. Average footprint sizes range typically from 0.4–1.0 m, depending on the flight height [20, 91]. Scan and pulse rates, in particular, have grown in recent years, leading to higher point densities as a function of flight height, velocity of the aircraft, scan angle, pulse rate and scan rate [10, 13].
The capability of the laser to penetrate gaps in vegetation allows the measurement of occluded ground. This is due to the laser’s large footprint relative to the vegetation gaps. At least the First Echo (FE) and the Last Echo (LE) can be recorded, as schematically depicted in Fig. 9.11. Ideally, the FE and LE are arranged in two different point clouds as subsets within LIDAR data [122] and clearly the differentiation of multiple echoes is a challenge. Modern LIDAR systems can record up to four echoes (or more if derived from full waveform datasets), while the latest survey techniques, such as low-level LIDAR, allow point densities up to 100 points per square meter [28]. The latest developments of the full waveform LIDAR have introduced a new range of applications. The recording of multiple echoes allows modeling of the vertical tree profile [14]. Acquired FE points mostly comprise canopies, sheds, roofs, dormers and even small details such as aerials or chimneys, whereas LEs are reflections of the ground or other lower surfaces after the laser has
392 |
|
H. Wei and M. Bartels |
Table 9.3 LIDAR versus aerial photogrammetry |
|
|
|
|
|
Property |
LIDAR |
Aerial photogrammetry |
|
|
|
Sensor |
Active |
Passive |
Georeferencing |
Direct |
Post-acquisition |
Point distribution |
Irregular |
Regular |
Vertical accuracy |
High |
Low |
Horizontal accuracy |
Low |
High |
Height information |
Directly from data |
Stereo matching required |
Degree of automation |
High |
Low |
Maintenance |
Intensive and expensive |
Inexpensive |
Life time |
Limited |
Long |
Contrast |
High |
Low |
Texture |
None |
Yes |
Color |
Monochrome |
Multispectral |
Shadows |
Minimal effect |
Clearly visual |
Ground captivity |
Vegetation gap penetration |
Wide open spaces required |
Breakline detection |
Difficult due to irregular sampling |
Suitable |
DTM generation source |
Height data |
Textured overlapping imagery |
Planimetry |
Random irregular point cloud |
Rich spatial context |
Land cover classification |
Unsuitable, fusion required |
Suitable |
|
|
|
penetrated gaps within the foliage. The occurrence of multiple echoes at the same geo-referenced point indicates vegetation but also edges of hard objects [10]. The difference between FE and LE therefore reveals, in the best case, building outlines and vegetation heights [138]. Table 9.3 summarizes the pros and cons of LIDAR versus traditional aerial photogrammetric techniques.
9.4.2 Accuracy, Error Types and Countermeasures
LIDAR is the most accurate remote sensing source for capturing height. It has revolutionized photogrammetry with regard to vertical accuracy, with values ranging between 0.10–0.26 m [3, 4, 34, 74, 104, 107, 167, 179]. Like any other physical measurements, LIDAR errors are composed of both systematic and random errors. Systematic errors are due to the setting of the equipment; generally they have a certain pattern and are therefore reproducible. Examples are systematic height shifts as a function of flight height, which are due to uncertainty of GPS, georeferencing and orientation. Time errors of assigning range and position are reported to be <10 μs [167]. Calibration can be carried out by using known mounting angles, the redundancy from overlapping (crossing) strips and ground truth (i.e. manually measured

9 3D Digital Elevation Model Generation |
393 |
GCPs which have been acquired in an accompanying field survey). Problems occur if the positions of GCPs and measured LIDAR points do not correspond with each other [137]. This can be solved using a high point density, acquired with a low altitude, low velocity and a steep scan angle.
In contrast, random errors are not reproducible and are thus more difficult to eliminate. Gross errors, blunders and ‘no data’ situations are due to a temporal malfunction of the LRF or occasional perturbations such as birds or low flying aircrafts [143]. Data voids are due to the irregular sampling nature of the LIDAR and have to be corrected using interpolation if required. The total number of gross errors and blunders may be small, but their overall impact on the data is strong. Kidner et al. [89] reported that local blunders can be large as 20 m and can be detected if the height of all neighbouring points is below a certain threshold, for example ≤5 m. Extreme blunders can be greater than 767 m [89] and can be removed by comparing the mean and standard deviation of the height differences of each LIDAR point in a defined neighborhood.
Point density and scan range per scanned line are a function of scan angle, however it is also known that the greater the scan angle the greater its elevation error [179]. The error caused by the scan angle becomes smaller when the flight height and pulse rate are lower [7]. A small scan angle ensures that terrain or object edges are resolved more clearly and vertical tree profiles can be sampled due to the fact that laser pulses reach lower tree branches [104]. In general, the smaller the scan angle, the higher the point density, the better the edges on man-made structure are sampled, and the better the laser can be pushed forward to lower branch levels of trees [138].
Multipath propagation causes backscattered laser light to travel a longer time. Consequently, some points will appear below the actual surface [91, 143]. Multipath effects of LE LIDAR data can be compensated for by exploiting the redundant information of FE and LE [166].
Finally, wind, atmospheric distortions and bright sunlight can all influence the accuracy of LIDAR data as the laser beam is narrow [12]. The best laser ranging conditions are achieved if the weather is dry, cool and clear [12]. Furthermore, water vapour and humidity such as rain and fog attenuate the power of the laser. This disturbing effect can be deliberately exploited for investigating clouds and aerosols in the atmosphere using ground-based LIDAR [77]. To generalize, studies have revealed that the greater slope, terrain roughness, amount of vegetation and the larger the flight velocity and height, the smaller the scan angle, the larger the random error will be [14, 74, 93, 179].
To reduce inaccuracies within the acquired data, error models are applied. A popular method to estimate the total error can be done by calculating the Root Mean Square Error (RMSE) of equal georeferenced GCPs and LIDAR points as defined in [74]:
|
= |
NGCP |
|
− |
|
|
|
RMSE |
|
|
1 |
NGCP(Xj |
|
GCPj )2 |
(9.22) |
|
|
|
|||||
|
|
|
|
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
394 |
|
H. Wei and M. Bartels |
Table 9.4 Typical systematic and random errors in LIDAR point clouds |
||
|
|
|
Error (Type) |
Order |
Counter measure |
|
|
|
Height shift (Systematic) |
≤20 cm |
Ground control points |
GPS shift (Systematic) |
10 cm |
Differential GPS |
Georeferencing (Systematic) |
<10 μs |
Strip adjustment, redundancy, revisit |
Orientation (Systematic) |
<10 μs |
Strip adjustment, redundancy, revisit |
Mounting angles (Systematic) |
N/A |
Calibrate and recalculate |
Slope of terrain (Random) |
(15–20) cm |
Slope adaptive algorithm |
Gross errors/blunders (Random) |
>100 cm |
FE/LE redundancy, manual intervention |
Object roughness (Random) |
<10 cm |
Surveys in leaf-off season |
Multipath (Random) |
<10 cm |
Small scan angle, FE/LE redundancy |
Bright sun light (Random) |
N/A |
Surveys at night |
Atmosphere, weather (Random) |
N/A |
Avoid forest fires, clouds, fog |
Strong winds (Random) |
N/A |
Avoid rough weather |
|
|
|
where NGCP is the total number of GCPj and Xj the corresponding LIDAR points with j {1, 2, . . . , NGCP}. To break the absolute error down, mean height differences (systematic error) and standard deviation of difference (random error) can be calculated. Yu [179] observed that the random error decreases at greater vegetation penetration rates (i.e. the more open the space is), greater point densities and lower flight heights, while the systematic error remains stable at different flight heights. Even if there is no initial vertical error evident, a horizontal error still has an impact on the vertical error. Hodgson et al. [75] established a link between the terrain slope angle α and the horizontal displacement eh of the LIDAR point yielding the vertical error ev :
ev = eh tan(α) |
(9.23) |
where the horizontal error eh is dominated by the flight height h, which is a general rule of thumb [74]
eh ≈ 0.1 % h |
(9.24) |
Systematic and random errors can be corrected by GCPs, surveyed at the same time with LIDAR data. From another point of view, LIDAR itself can be used to provide GCPs for accuracy assessment of photogrammetric products as recently demonstrated by James et al. [84]. Systematic errors can either be eliminated by careful calibration or, if known, calculated and removed from the error budget. Random errors can only be estimated after the survey in a post-processing analysis. Table 9.4 summarizes all typical systematic and random errors and states countermeasures.